Импульсные преобразователи
Преобразователь этого типа (рис. 14.14) представляет собой катушку 1 с разомкнутым ферромагнитным сердечником, установленную возле вала 2, частота вращения которого измеряется; на валу монтируется один или несколько ферромагнитных зубцов 3.
|
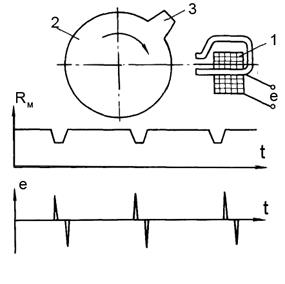
Сердечник катушки предварительно намагничивается. При вращении вала зуб проходит вблизи катушки и уменьшает магнитное сопротивление RM сердечника, как показано на графике. В соответствии с этим изменяется магнитный поток, проходящий через катушку, и в ней индуцируется ЭДС е. С выводов катушки снимается последовательность двуполярных импульсов, частота которых равна частоте прохождения зубцов вблизи катушки, т.е. пропорциональна частоте вращения вала.
Вторичным преобразователем импульсного индукционного преобразователя является частотомер, проградуированный в единицах частоты вращения.
Погрешность индукционных преобразователей. ЭДС индукционных преобразователей пропорциональна скорости перемещения катушки лишь при условии, что индукция В постоянна на протяжении всего пути ее перемещения. Непостоянство индукции вызывает возникновение погрешности.
Погрешность индукционных преобразователей также во многом зависит от тока, который потребляет вторичный преобразователь. Проходя по измерительной обмотке индукционного преобразователя, этот ток создает магнитное поле, которое согласно правилу Ленца направлено встречно направлению основного поля и производит размагничивающее действие. Вследствие этого суммарная индукция уменьшается, уменьшается и ЭДС преобразователя. Это явление, имеющее место в электрических машинах и, в частности, в тахометрических преобразователях называется реакцией якоря. Вследствие реакции якоря уменьшается чувствительность тахометрического преобразователя и его функция преобразования становится нелинейной, что приводит к погрешности. Для уменьшения погрешности следует уменьшить ток преобразователя. Имеются также конструктивные методы уменьшения этой погрешности.
Описанный вид погрешности присущ тахометрическим преобразователям, поскольку их вторичными приборами служат электромеханические приборы с большим потреблением мощности.
Влияние тока нагрузки на функцию преобразования преобразователей вибрации меньше, чем на функцию преобразования тахометрических преобразователей. Нагрузкой преобразователей вибрации обычно являются электронные усилители. Они имеют большое входное сопротивление, которое ограничивает ток преобразователя и тем самым уменьшает погрешность.
Если нагрузка индукционного преобразователя потребляет значительный ток, то может возникнуть погрешность вследствие изменения внутреннего сопротивления преобразователя, поскольку изменяется падение напряжения на его внутреннем сопротивлении. Изменение внутреннего сопротивления может быть обусловлено температурными изменениями сопротивления измерительной обмотки и сопротивления линии связи со вторичным прибором. Внутреннее сопротивление тахометрического преобразователя постоянного тока нестабильно также вследствие изменения сопротивления коллектора.
При изменении частоты вращения синхронного тахометрического преобразователя изменяется как ЭДС, так и ее частота. При изменении частоты меняются его входное сопротивление и входное сопротивление его нагрузки. Изменения сопротивлений могут привести к нелинейной функции преобразования прибора в целом, даже если ЭДС тахометрического преобразователя линейно зависит от измеряемой скорости.
Выходной величиной синхронных тахометрических преобразователей является либо значение генерируемой ЭДС, либо ее частота. В последнем случае в качестве вторичного преобразователя используется частотомер. Применяемые стрелочные частотомеры не должны изменять свои показания при изменении напряжения.
Таким образом, погрешность индукционных преобразователей в значительной степени зависит от режима, в котором они работают. Наибольшая погрешность возникает в режиме, при котором через нагрузку течет значительный ток. Однако для работы в таком режиме используют наиболее простой вторичный преобразователь. Меньшие погрешности имеют место в режиме холостого хода, когда ток в измерительной катушке практически отсутствует. При работе в таком режиме требуется более сложная и дорогая аппаратура, должны использоваться измерительные механизмы повышенной чувствительности или усилительные устройства.
При измерении частоты вращения вала наименьшую погрешность можно получить, если в качестве выходной величины тахометрического преобразователя используется частота изменения ЭДС, а в качестве вторичного преобразователя — цифровой частотомер. При этом исключается влияние нестабильности величины выходного напряжения преобразователя и используется высокая точность цифрового частотомера. Однако в этом случае требуется наиболее сложная и дорогая аппаратура.
Дата добавления: 2016-04-19; просмотров: 1126;