ОСНОВНОЙ ЗАКОН ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Пусть твердое тело вращается вокруг неподвижной оси z (рис.1). При таком движении все точки тела описывают окружности, центры которых лежат на оси вращения. Поскольку векторы перемещения , скорость и ускорение различны для различных точек тела, для характеристики вращательного движения удобнее использовать угол поворота j, угловую скорость w , угловое ускорение e, одинаковые для всех точек твердого тела.
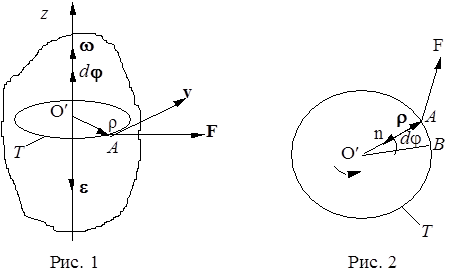
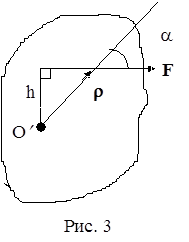
Рассмотрим движение точки A . Она движется по окружности Т, центр которой O¢ распологается на оси z . Для определения угла поворота j вектора r, определяющего положение точки А , введем неподвижную линию О¢B. Пусть rза время dt поворачивается на угол dj, в указанном направлении (рис.2). Представим малый угол поворота в виде вектора djнаправленного вдоль оси, и его направление определим следующим образом: если смотреть с конца вектора dj , вращение на угол dj видно происходящим против направления движения часовой стрелки.
Векторная величина
 (1)
(1)
называется угловой скоростью. Она направлена вдоль оси, вокруг которой вращается тело, в сторону вектора dj. Изменение вектора угловой скорости со временем характеризуется величиной
e=  , (2)
, (2)
которую называют угловым ускорением.
Направление вектора e совпадает с направлением приращения вектора угловой скорости dw. Если dw > 0, то eи w направлены в одну сторону, а при dw < 0 эти векторы направлены в противоположные стороны.
Векторы линейных и угловых параметров связаны между собой соотношениями
u = [wr] ,
at = [er] , (3)
an = w2 n ,
где at и an – тангенциальная и нормальная составляющие ускорения, n– единичный вектор, направленной по нормали к центру кривизны траектории  .
.
Чтобы твердое тело с закрепленной осью привести во вращательное движение, необходимо хотя бы в одной из его точек приложить внешнюю силу, не проходящую через ось вращения и не параллельную ей. Моментом силы F, приложенной в точке А перпендикулярно оси z , называется вектор
|
Мz = [rF], (4)
где r – вектор, указанный на рис.1 и 2. Его модуль определяется формулой
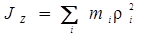
Mz =r F sin a. (5)
Здесь a - угол между векторами r и F, а величина h = r sin a - плечо силы (рис. 3). В частном случае a =p/2 получается
h = r, Mz = rF . (6)
Моментом инерции материальной точки относительно оси z называется произведение ее массы mi на квадрат расстояния ri от материальной точки до оси вращения
Ji = mi ri 2 . (7)
Для определения момента инерции тела относительно оси его мысленно разбиваем на множество мелких частей. Момент инерции тела относительно оси z равен сумме моментов инерции его частей, то есть
 . (8)
. (8)
Основной закон динамики вращательного движения твердого тела вокруг неподвижной оси z записывается в виде
MZ = e JZ . (9)
Этот закон может быть проверен с помощью маятника Обербека.
Если сравнить (9) со вторым законом Ньютона для материальной точки
F = am , (10)
можно увидеть их сходство. Если в (10) заменить линейное ускорение aугловым ускорением e, массу m моментом инерции JZ и силу моментом силы, то получится уравнение (9). Поэтому можно говорить, что инертность тела во вращательном движении характеризуется его моментом инерции.
Описание установки
|
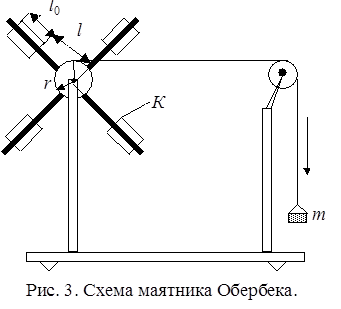
Маятник Обербека (рис.3) представляет собой крестовину из четырех стержней с делениями, прикрепленных ко втулке с осью. На стержни надеваются цилиндры К массой M, которые могут быть закреплены на разных расстояниях l от оси вращения. Шкив радиусом r насажен на ось вращения маятника. На шкив наматывается нить, перекинутая через блок. На конце нити подвешивается груз массой m. Под действием груза нить разматывается и приводит маятник в равноускоренное вращательное движение. Положение груза определяется по шкале с делениями.
Момент силы Мz, под действием которого маятник приводится во вращательное движение, определяется по формуле
Mz = Fнr , (11)
где Fн – сила натяжения нити, r – радиус шкива. Для определения силы натяжения нити запишем второй закон Ньютона P – Fн = m a , где P =mg – сила тяжести груза. Отсюда следует
Fн = m g - ma = m (g - a) . (12)
Из (11) и (12) следует
Mz = m (g – a) r .(13)
Ускорение падения груза, определяется формулой
 (14)
(14)
где h – высота, с которой падает груз, t – время, в течение которого падает груз с высоты h. Подставив (14) в (13), получим
Mz = m  . (15)
. (15)
С таким же тангенциальным ускорением движутся все точки шкива, находящиеся на расстоянии r от оси вращения. Поэтому угловое ускорение шкива равно
 . (16)
. (16)
| <== предыдущая лекция | | | следующая лекция ==> |
| ОСНОВЫ ПРОГНОЗИРОВАНИЯ ОБЩЕСТВЕННОГО ЗДОРОВЬЯ И ЗДРАВООХРАНЕНИЯ | | | Некоммерческая организация: характеристика и особенности функционирования в системе корпоративной социальной ответственности |
Дата добавления: 2016-04-14; просмотров: 4958;