Ограничители грузоподъемности
Ограничители грузоподъемности устанавливают на стреловых кранах и кранах мостового типа. Однако между ограничителями грузоподъемности этих двух групп кранов имеется принципиальное различие. Основным назначением ограничителей грузоподъемности кранов мостового типа (мостовых и козловых кранов и мостовых перегружателей) является защита силовых элементов крана и, в первую очередь, крановой металлоконструкции от недопустимых перегрузок. Назначением ограничителей грузоподъемности свободностоящих стреловых кранов является, кроме того, защита кранов от опрокидывания.
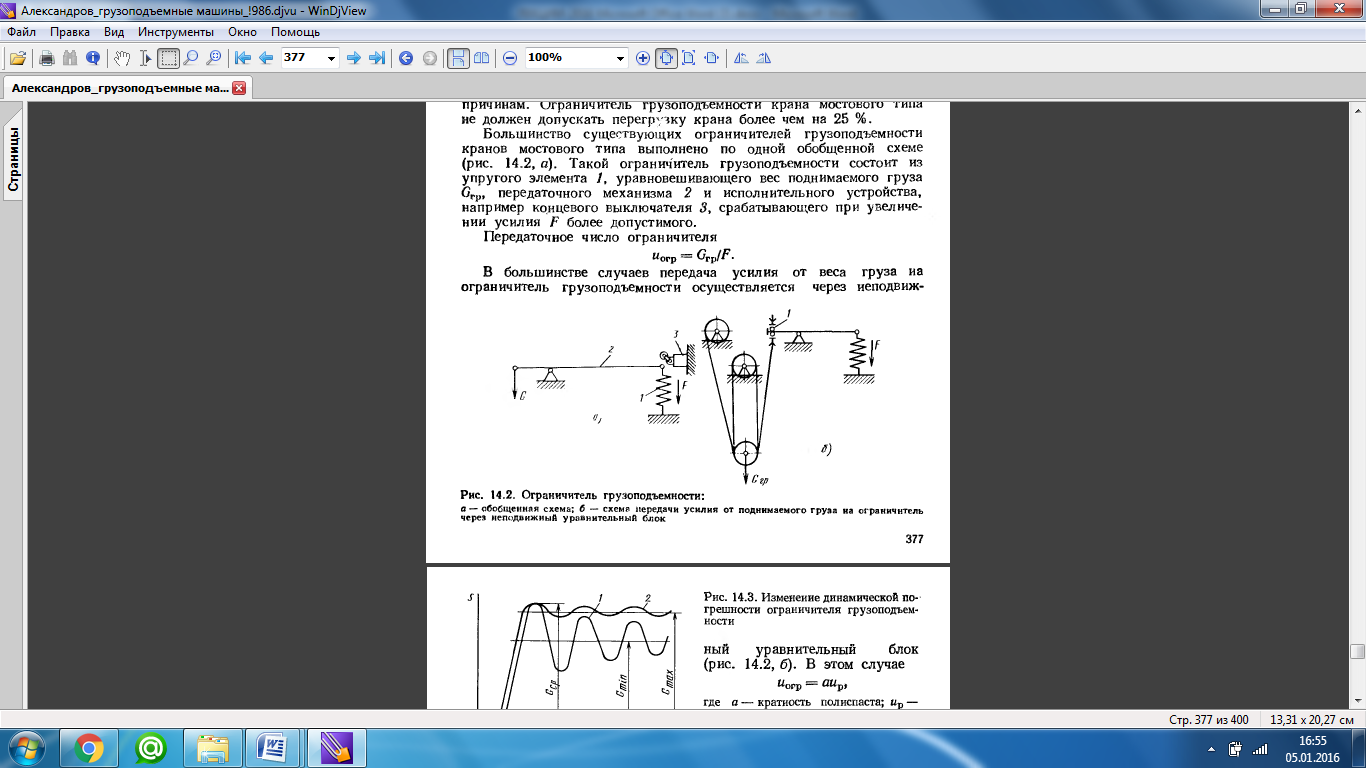
Ограничителем грузоподъемности кранов мостового типа принято называть прибор, осуществляющий отключение механизма подъема при подъеме груза массой, превышающей допустимую грузоподъемность. По правилам Госгортехнадзора ограничители грузоподъемности должны быть установлены только на те краны мостового типа, которые могут быть перегружены по технологическим причинам. Ограничитель грузоподъемности крана мостового типа не должен допускать перегрузку крана более чем на 25 %.
Большинство существующих ограничителей грузоподъемности кранов мостового типа выполнено по одной обобщенной схеме (14.2,а). Такой ограничитель грузоподъемности состоит из упругого элемента /, уравновешивающего вес поднимаемого груза Grp, передаточного механизма 2 и исполнительного устройства, например концевого выключателя 3, срабатывающего при увеличении усилия F более допустимого.
Суммарную погрешность можно представить как сумму статической и динамической погрешностей. Причинами появления статической погрешности являются следующие факторы: силы трения в полиспасте механизма подъема и передаточном механизме ограничителя, изменение момента размыкания контакта исполнительного устройства вследствие появления остаточных деформаций упругого уравновешивающего элемента, износ контактов, изменение питающего напряжения и др. Статическая погрешность увеличивается при повышении кратности полиспаста и передаточного числа ограничителя.
Динамическая погрешность составляет основную долю погрешности ограничителя грузоподъемности. Причина появления динамической погрешности состоит в том, что при различных режимах подъема груза одинаковой массы с опоры возникают различные максимальные динамические усилия в канатах, которые передаются на исполнительный элемент ограничителя. Динамическая погрешность, возникающая при изменении усилий S в канатах при подъеме груза минимального веса Gmin с максимальным динамическим коэффициентом и максимального веса с минимальным динамическим коэффициентом, показана на рис 14.3 (соответственно кривая 1 и 2). Причем в обоих случаях максимальные усилия в канатах достигают значений Gcp, при превышении которых ограничитель срабатывает.
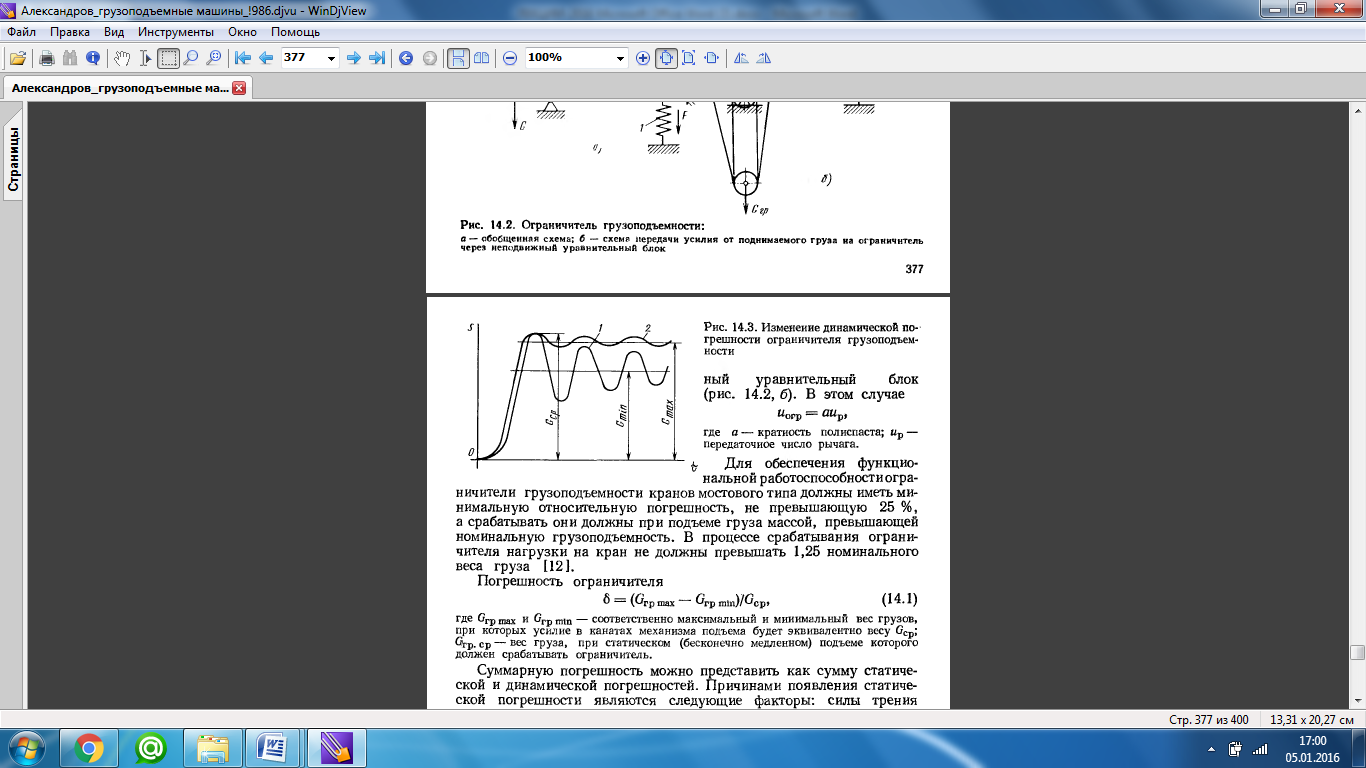
Рис 14.3 Изменении динамической погрешности ограничителя грузоподъемности.
Для уменьшения погрешности ограничителя необходимо предусматривать некоторые конструктивные мероприятия, направленные на уменьшение сил трения, влияющих на статическую погрешность и уменьшение максимального динамического коэффициента усилий в канатах. Жесткость подвеса груза и, следовательно, kmax уменьшаются при уменьшении жесткости упругого уравновешивающего элемента и передаточного числа ограничителя, поэтому для максимального снижения статической и динамической погрешностей передаточное число ограничителя должно быть минимальным и определяться только кратностью полиспаста. Динамическую погрешность можно уменьшить установкой специальной блокировки, исключающей подъем груза с опоры при работе двигателя на всех характеристиках, кроме наиболее мягкой. При этом максимальные динамические нагрузки при подъеме груза с опоры существенно снижаются (см. гл. 12).
Другое важное свойство ограничителя грузоподъемности — быстродействие существенно зависит от того, как ограничитель воздействует на механизм подъема для предотвращения перегрузки крана. Применяют два способа воздействия ограничителя на механизм подъема. По первому способу срабатывание ограничителя приводит к отключению двигателя механизма подъема и включению тормоза. Учитывая, что кинетическая энергия вращающихся масс механизма подъема достаточно велика (в современных мостовых кранах она в 10—20 раз больше кинетической энергии груза номинальной массы), а время срабатывания тормоза (от снятия питающего напряжения до появления номинального момента) составляет 0,1—0,3 с, после срабатывания ограничителя поднимаемый груз, даже если его масса превышает номинальную грузоподъемность в 1,5—1,8 раза, успевает оторваться от опоры. Следовательно, такой ограничитель предотвращает работу крана с грузами недопустимой массы, но не предохраняет кран от перегрузки.
При другом способе воздействия ограничитель грузоподъемности производит перевод на некоторое время двигателя механизма подъема в режим опускания груза, а затем отключает двигатель и накладывается тормоз. В результате интенсивного торможения двигателем груз не успевает оторваться от опоры. В этом случае кран надежно предохранен от недопустимых перегрузок.
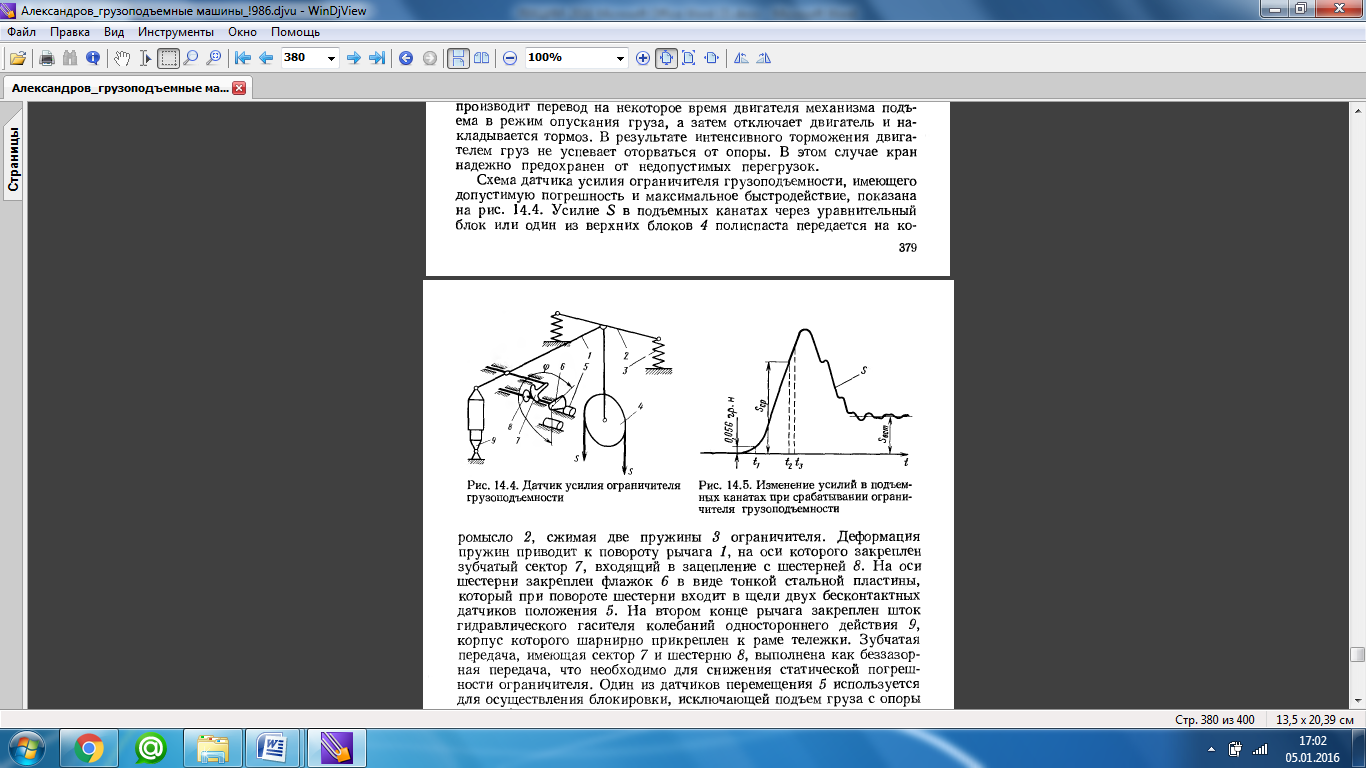
Схема датчика усилия ограничителя грузоподъемности, имеющего допустимую погрешность и максимальное быстродействие, показана на рис 14.4. Усилие S в подъемных канатах через уравнительный блок или один из верхних блоков 4 полиспаста передается на коромысло 2, сжимая две пружины 3 ограничителя. Деформация пружин приводит к повороту рычага 1, на оси которого закреплен зубчатый сектор 7, входящий в зацепление с шестерней 8. На оси шестерни закреплен флажок 6 в виде тонкой стальной пластины, который при повороте шестерни входит в щели двух бесконтактных датчиков положения 5. На втором конце рычага закреплен шток гидравлического гасителя колебаний одностороннего действия 9, корпус которого шарнирно прикреплен к раме тележки. Зубчатая передача, имеющая сектор 7 и шестерню 8, выполнена как беззазорная передача, что необходимо для снижения статической погрешности ограничителя. Один из датчиков перемещения 5 используется для осуществления блокировки, исключающей подъем груза с опоры при работе двигателя на всех характеристиках, кроме характеристики при полностью включенных роторных резисторах, а другой датчик предназначен для подачи первоначального сигнала на срабатывание ограничителя. Установка гасителя колебаний одностороннего действия производится так, что при увеличении усилий в канатах сопротивление гасителя близко к нулю, а при уменьшении усилий в канатах сопротивление гасителя отличается от нуля. Это приводит к уменьшению времени затухания вертикальных упругих колебаний груза и крановой металлоконструкции и не уменьшает быстродействие ограничителя грузоподъемности.
При попытке подъема с опоры груза массой, превышающей номинальную грузоподъемность, работа ограничителя происходит в следующей последовательности. В исходном положении при ослабленных канатах флажок ограничителя находится в щели первого датчика положения. Вследствие этого после перемещения рукоятки контроллера или командоконтроллера в любое положение на «подъем» двигатель начинает работать с полностью введенными роторными резисторами до тех пор, пока существует слабина подъемных канатов. Это соответствует подъему груза на самой мягкой механической характеристике двигателя. После выбора слабины каната и увеличения его натяжения S до значения 0,05 Grp.н ( рис 14.5), что соответствует моменту времени t1, флажок датчика усилия выходит из щели первого датчика положения и включается реле задержки времени. По окончании задержки в системе управления становится возможным вывод резисторов из роторной цепи двигателя и, следовательно, перевод работы двигателя на более жесткие характеристики. В момент времени t2 когда усилие в канатах будет соответствовать усилию срабатывания Scp, флажок датчика усилия входит в щель второго датчика положения, что приводит к реверсированию подъемною двигателя. Через некоторое время, определяемое с помощью реле времени, в момент времени t3 двигатель отключается от сети и механический тормоз включается. По окончании торможения канаты имеют остаточное усилие Sост, что предотвращает рассыпание груза.
Ограничители грузоподъемности стреловых свободностоящих кранов (стреловых самоходных, башенных и портальных) являются ограничителями грузового момента, который зависит от массы поднимаемого груза и вылета стрелы. По правиламГосгортехнадзора ограничители грузоподъемности стреловых кранов должны отключать автоматически механизмы подъема и изменения вылета тогда, когда грузовой момент превышает номинальное значение более чем на 10 %, а для портальных кранов более чем на 15 %. Для стреловых кранов, имеющих две или более грузовые характеристики, должен быть применен ограничитель грузового момента, имеющий устройство для переключения в соответствии с выбранной характеристикой.
В стреловых кранах срабатывание ограничителя грузоподъемности возможно при подъеме груза с опоры на постоянном вылете стрелы и увеличении вылета стрелы с поднятым грузом. В обоих случаях ограничитель грузоподъемности должен предотвращать опрокидывание крана.
Ограничители грузоподъемности стреловых кранов должны иметь погрешность не более 10 % (для портальных кранов не более 15 %), т. е. меньшую, чем погрешность кранов мостового типа. В стреловых кранах они обладают меньшим быстродействием, чем ограничители грузоподъемности кранов мостового типа. Это объясняется тем, что динамические нагрузки элементов стреловых кранов при подъеме груза с опоры обычно ниже, чем динамические нагрузки кранов мостового типа вследствие значительной упругой податливости подвески груза стреловых оттяжек, башни башенных кранов, а также оснований, на которых установлены стреловые краны. Кроме того, в стреловых кранах при некоторой задержке в срабатывании ограничителя при подъеме с опоры груз недопустимой массы не отрывается от опоры и кран не опрокидывается. Только длительная работа механизма подъема может привести к потере устойчивости крана. Следует также отметить, что кратковременные динамические перегрузки не приводят к опрокидыванию стреловых кранов и ограничитель грузоподъемности может на них не реагировать.
Наибольшее распространение имеет универсальный ограничитель грузоподъемности типа ОГП-1, предназначенный для установки на башенных, автомобильных, пневмоколесных, гусеничных и железнодорожных кранах. Этот ограничитель состоит из датчика усилия, датчика угла наклона стрелы и блока исполнительной электроаппаратуры.
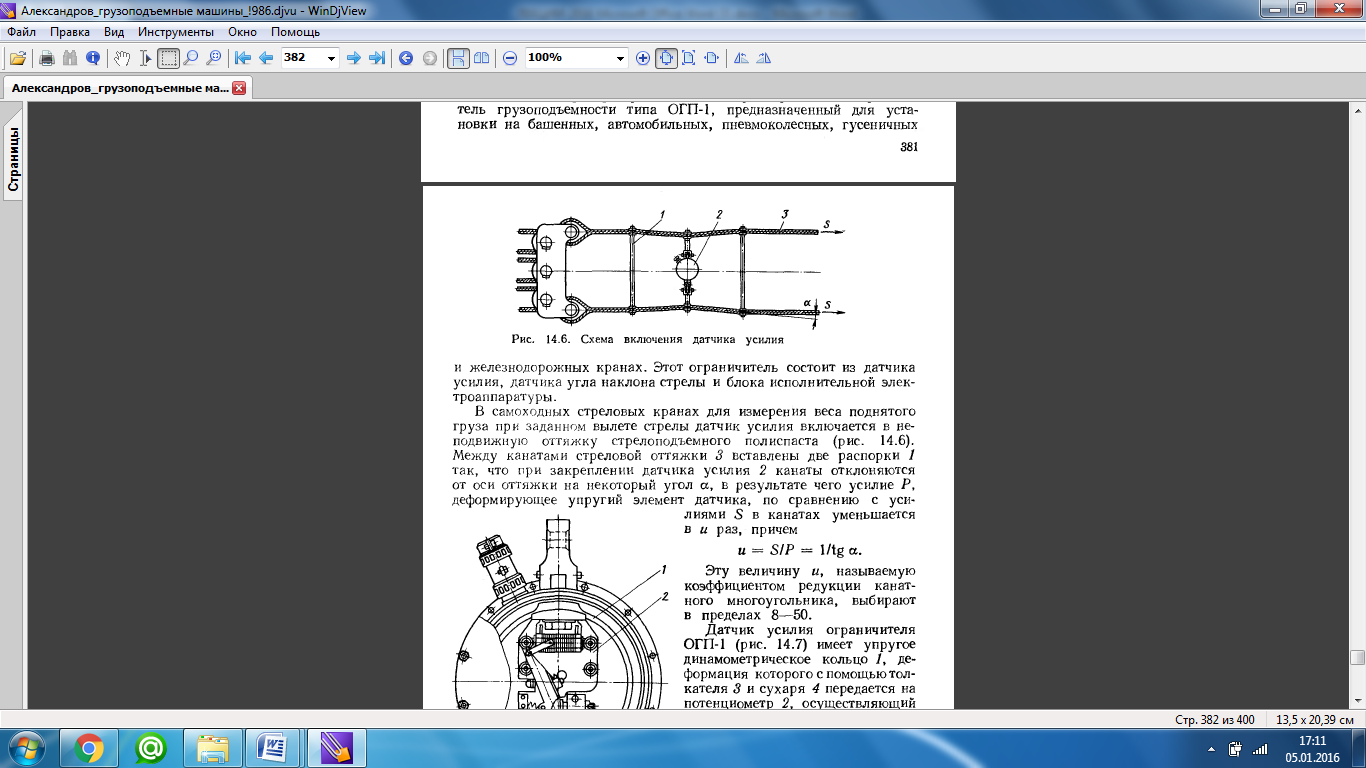
В самоходных стреловых кранах для измерения веса поднятого груза при заданном вылете стрелы датчик усилия включается в неподвижную оттяжку стрелоподъемного полиспаста рис 14.6.
Датчик усилия ограничителя ОГП-1(рис 14.7) имеет упругое динамометрическое кольцо 1, деформация которого с помощью толкателя 3 и сухаря 4 передается на потенциометр 2, осуществляющий преобразование перемещения кольца в некоторое электрическое напряжение.
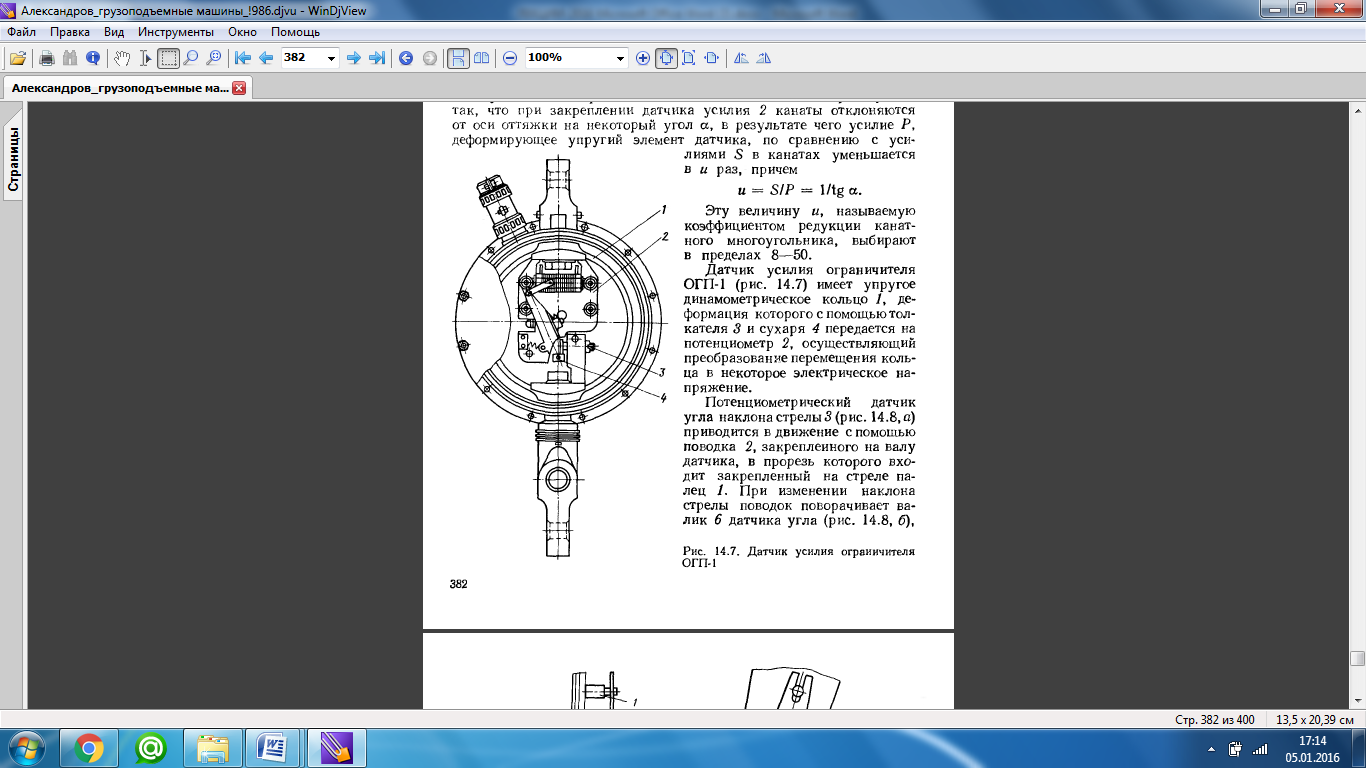
Рис 14.7 Датчик усилия ограничителя ОГП-1
Потенциометрический датчик угла наклона стрелы 3 ( рис 14.8, а) приводится в движение с помощью поводка 2, закрепленного на валу датчика, в прорезь которого входит закрепленный на стреле палец 1. При изменении наклона стрелы поводок поворачивает валик 6 датчика угла ( рис 14.8, б), на другом конце которого закреплен профилированный кулачок 4. По поверхности кулачка скользит штифт рычага 7, который поворачивает движок потенциометра 5. С помощью кулачка задается необходимая для данного крана кривая допустимой, так называемой заградительной грузовой характеристики, когда масса поднимаемого груза при данном вылете равна 1,1 номинальной массы. Профилирование кулачка осуществляется так, чтобы между допустимым усилием в стреловом полиспасте Sдоп и углом наклона стрелы φ была бы зависимость, соответствующая грузовой характеристике крана.
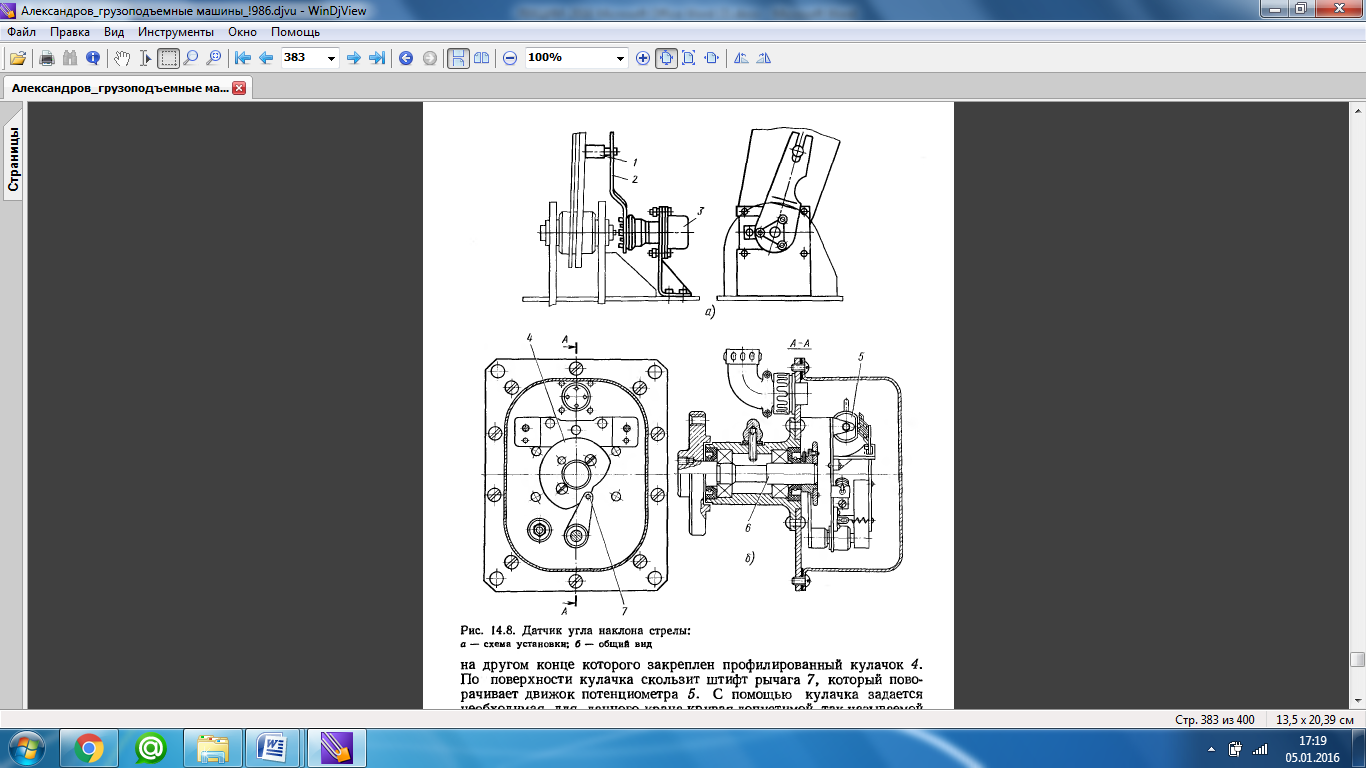
Рис 14.8 Датчик угла наклона стрелы а)схема установки б) общий вид
Срабатывание ограничителя грузоподъемности происходит, когда напряжение, снимаемое с потенциометра датчика усилия, будет равно напряжению, снимаемому с потенциометра датчика угла. Для исключения срабатывания ограничителя при кратковременных динамических перегрузках, не опасных для устойчивости крана, в схеме ограничителя предусмотрена задержка срабатывания в течение 0,5 с. За это время груз не должен подняться над опорой более чем на 0,15 м, а при опускании груза стрелой перегрузка после срабатывания ограничителя не должна превышать 1,05 Sдоп.
Дата добавления: 2016-04-11; просмотров: 9886;