Искусственные нейронные сети в ПИД регуляторах
Практическое применение искусственных нейронных сетей в системах авторегулирования.
Искусственные нейронные сети в ПИД регуляторах
Нейронные сети, как и нечёткая логика, используются в ПИД регуляторах двумя путями: для построения самого регулятора и для построения блока настройки его коэффициентов. Особенностью нейронной сети является способность к «обучению», что позволяет передать нейронной сети опыт эксперта. Регулятор с нейронной сетью похож на регулятор с табличным управлением, однако отличается специальными методами настройки («обучения»), разработанными для нейронных сетей, и методами интерполяции данных.
В отличие от нечёткого регулятора, где эксперт должен сформулировать правила настройки в лингвистических переменных, при использовании нейронной сети от эксперта не требуется формулировки правил – достаточно, чтобы он несколько раз сам настроил регулятор в процессе «обучения» нейронной сети.
Нейронные сети были предложены в 1943 году МаккКаллоком и Питтсом как результат изучения нервной деятельности и биологических нейронов. Искусственный нейрон представляет собой функциональный блок с одним выходом y и n входами x1, x2,…xn, который реализует в общем случае нелинейное преобразование где wi– весовые коэффициенты (параметры) при входных переменных xi; b – постоянное смещение; F(•) – функция активации нейрона. Функция активации может иметь, например, такой вид: F(z) = 1/(1 + exp(–az)) — сигмоидальная функция с некоторым параметром a. Нейронная сеть (рис. 32) состоит из множества связанных между собой нейронов, количество связей может составлять тысячи. Благодаря нелинейности функций активации и большому количеству настраиваемых коэффициентов (в работе [21] использовано 35 нейронов во входном слое и 25 – в выходном, при этом количество коэффициентов составило 1850) нейронная сеть может выполнять достаточно точно нелинейное отображение множества входных сигналов во множество выходных.
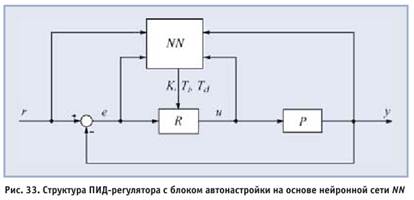
Типовая структура системы автоматического регулирования с ПИД регулятором и нейронной сетью в качестве блока автонастройки показана на рис. 33 [21, 22]. Нейронная сеть NN в данной структуре играет роль функционального преобразователя, который для каждого набора сигналов r, e, u, y вырабатывает коэффициенты ПИДДрегулятора K, T i, Td.
Самой сложной частью в проектировании регуляторов с нейронной сетью является процедура «обучения» сети.
«Обучение» заключается в идентификации неизвестных параметров нейронов wi, b и a. Для «обучения» нейронной сети обычно используют методы градиентного поиска минимума критериальной функции ε = (u*– u)2, зависящей от параметров нейронов. Процесс поиска является итерационным, на каждой итерации находят все коэффициенты сети, сначала для выходного слоя нейронов, затем предыдущего и так до первого слоя (метод обратного распространения ошибки) [17]. Используются также другие методы поиска минимума, в том числе генетические алгоритмы, метод моделирования отжига, метод наименьших квадратов.

Процесс «обучения» нейронной сети выглядит следующим образом (рис. 34). Эксперту предоставляют возможность подстраивать параметры регулятора K, Ti, Td в замкнутой системе автоматического регулирования при различных входных воздействиях r(t). Предполагается, что эксперт умеет это делать с достаточным для практики качеством. Временные диаграммы (осциллограммы) переменных r*, e*, u*, y*, полученные в подстраиваемой экспертом системе (рис. 34 а), записываются в архив и затем подаются на нейронную сеть, подключённую к ПИД регулятору (рис. 34 б). Нейронная сеть настраивается таким образом, чтобы минимизировать погрешность
ε = (u*– u)2 между сигналом u*, полученным с участием эксперта, и сигналом u, полученным в процессе «обучения» нейронной сети. После выполнения процедуры «обучения» параметры нейронной сети заносятся в блок автонастройки. В соответствии с теорией нейронных сетей «обученная» нейронная сеть должна вести себя так же, как и эксперт, причём даже при
тех входных воздействиях, которые не были включены в набор сигналов, использованных при «обучении».
Длительность процесса «обучения» является основной преградой на пути широкого использования методов нейронных сетей в ПИД регуляторах [16]. Другими недостатками нейронных сетей являются невозможность предсказания погрешности регулирования для воздействий, которые не входили в набор обучающих сигналов, а также отсутствие критериев выбора количества нейронов в сети, длительности «обучения», диапазона и количества обучающих воздействий. Ни в одной из публикаций не исследовалась робастность или запас устойчивости регулятора.
| <== предыдущая лекция | | | следующая лекция ==> |
| Алгоритм функционирования сети Хемминга | | | Практическое применение искусственных нейронных сетей в задачах аппроксимации. |
Дата добавления: 2016-03-30; просмотров: 4137;