Понятие об электроприводе
Электроприводом называется электромеханическое устройство, предназначенное для электрификации и автоматизации рабочих процессов. Электропривод состоит из преобразующего, электродвигательного, передаточного и управляющего устройств (рис. 1).
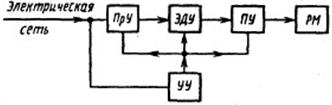
Рис. 1 Структурная схема электропривода
Преобразующее устройство ПрУ преобразует напряжение, ток или частоту напряжения. Оно может быть выполнено в виде магнитного усилителя, магнитного усилителя с выпрямлением, управляемого выпрямителя на тиристорах и т.д. В электродвигательном устройстве ЭДУ происходит преобразование электрической энергии в механическую.
Передаточное устройство ПУ служит для изменения скорости до значения, необходимого рабочему механизму РМ. Оно может быть выполнено в виде редуктора, т.е. быть неуправляемым.
Управляемое ПУ представляет собой коробку передач с электромагнитными муфтами, изменяющими ее передаточное число. Управляющее устройство УУ регулирует работу всех блоков электропривода, изменяя мощность на валу рабочего механизма, значение и частоту напряжения, схему включения электродвигателя, передаточное число коробки передач, направление вращения электродвигателя и т.д. На практике электропривод бывает автоматизированный и неавтоматизированный. В автоматизированном электроприводе человек создает только начальное управляющее воздействие (пуск электропривода). В неавтоматизированном человек периодически управляет работой электропривода в зависимости от отклонений от заданного режима.
Электроприводы делят на три группы:
1) групповые;
2) одиночные;
3) многодвигательные.
В групповых электроприводах электродвигатель с помощью механической передачи (трансмиссии) приводит в действие несколько рабочих механизмов.
В одиночных электроприводах механизм приводится в действие индивидуальным электродвигателем. При этом все элементы рабочего механизма соединяются с приводным двигателем соответствующими передачами.
В многодвигательных электроприводах каждый орган рабочего механизма снабжен своим двигателем. Так, например, на расточном станке вращение фрезы производится с помощью одного двигателя, продольное перемещение детали - другого, поперечное перемещение - третьего.
Основные элементы автоматизированного электропривода показаны на рис. 2.
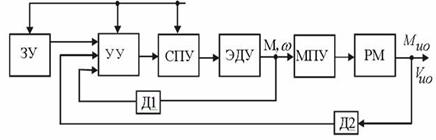
Рис. 2 Структурная схема автоматизированного электропривода
Дадим более подробную характеристику перечисленных элементов АЭП.
Под рабочими машинами понимают механические устройства, осуществляющие изменение формы, свойств, состояния и положение предметов труда или сбор, переработку и использование информации. Примерами рабочих машин для изменения формы предметов труда могут служить металлообрабатывающие станки, прессы, прокатные станы металлургического производства и др. Изменение свойств и состояния предметов труда осуществляется, например, с помощью установок для закалки, нанесения покрытий, химических установок, компрессоров и др. Для изменения местоположения объектов используются подъемные краны, лифты, эскалаторы, конвейеры, электрифицированные транспортные средства и др. Учитывая столь широкую область применения АЭП, можно сказать, что он охватывает практически все области современной техники.
Электродвигательное устройство является в электроприводе основным элементом, преобразующим механическую энергию в электрическую. В качестве ЭДУ используются асинхронные двигатели синхронные двигатели, двигатели постоянного тока независимого, последовательного и смешанного возбуждения, шаговые, вентильные двигатели и др.
Механическая энергия от ЭДУ передается к исполнительным органам РМ через механическое передаточное устройство (механический редуктор, цепная передача, ходовая пара «винт-гайка» и т.д.). МПУ позволяет при необходимости преобразовать выходные переменные ЭДУ в требуемые для приведения в движения РМ. Например, преобразовать вращательное движение вала двигателя в линейное перемещение суппорта токарного станка, понизить с помощью редуктора частоту вращения вала двигателя, обеспечить необходимую величину момента или усилия на исполнительном органе РМ.
Для создания регулирующего воздействия на ЭДУ используется силовое преобразовательное устройств. На вход СПУ поступают сигналы от управляющего устройства. Желаемые значения регулируемых переменных задаются с помощью задающего устройства.
Современные АЭП при жестких требованиях к качеству регулирования выходных переменных выполняются в виде замкнутых систем автоматического управления. При этом на входы УУ кроме сигналов задания поступают сигналы обратной связи, формируемые датчиками обратных связей Д1, Д2, и т.д., например, сигналы пропорциональные частоте вращения двигателя wд, моменту на валу двигателя, моменту Mио и скорости Vио исполнительного органа, и др. В замкнутой системе УУ формирует командные сигналы на СПУ в функции сигналов рассогласования, получаемых в результате сравнения задающих сигналов с сигналами соответствующих датчиков обратных связей.
Автоматизированным электроприводом называется электромеханическая система, предназначенная для приведения в движение исполнительных органов рабочих машин и управления их технологическими процессами, состоящая из задающего, управляющего, силового преобразовательного, электродвигательного и механического передаточного устройств.
В тех случаях, когда нет жестких требований к качеству управления движением исполнительных органов рабочей машины, используются более простые привода, состоящие из силового выключателя и электродвигателя.
С точки зрения способов распределения механической энергии разнообразные электроприводы можно разделить на 3 вида: групповой, индивидуальный, взаимосвязанный.
Групповой электропривод применялся на первых этапах развития техники привода и обеспечивал движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной и той же машины. Передача механической энергии и ее распределение в этом случае осуществлялось от одного двигателя с помощью трансмиссий. Очевидные недостатки такого привода – громоздкость механических связей, сложность управления движением каждого исполнительного органа. Вследствие этого групповой электропривод в настоящее время почти не применяется.
В индивидуальном электроприводе управление движением каждого исполнительного органа обеспечивается отдельным двигателем, что упрощает механические передачи, облегчает управление движением, позволяет достичь более высоких энергетических показателей.
Взаимосвязанный электропривод имеет два или несколько электрически или механически связанных между собой двигателей. Примером взаимосвязанного ЭП может служить привод цепного конвейера большой протяженности. Исполнительным органом такого конвейера служит цепь, приводимая в движение несколькими двигателями, установленными по длине конвейера. Взаимосвязанный ЭП широко применяется в транспортных установках, бумагоделательных машинах, текстильных агрегатах, прокатных станах металлургического производства и т.д. Одной из разновидностей взаимосвязанного электропривода является многодвигательный привод – это электропривод, в котором несколько двигателей работают на общий вал.
Дата добавления: 2016-02-16; просмотров: 11194;