Потери мощности и КПД машин постоянного тока
КПД машины является отношением полезной выходной мощности Р2 к подводимой Р1. Для определения КПД, как правило, применяются косвенные методы, при которых вычисляются потери мощности при нагрузке.
Наиболее просто определяются электрическая мощность на выходе генератора Р2 и мощность, подводимая к двигателю, Р1. Поэтому выражения КПД для генераторов и двигателей обычно отличаются друг от друга:
для генераторов  ; (27)
; (27)
для двигателей  . (28)
. (28)
Определение выходной мощности и порядка учета потерь двигателя с параллельным возбуждением показаны на диаграмме (рис. 17).
Потери в цепи якоря двигателя параллельного возбуждения рм состоит из потерь в сопротивлениях обмотки якоря rя, обмотки добавочных полюсов rд.п, компенсационной rк (при наличии), а также потерь в контакте щетки – коллектор. Сопротивление цепи берется при температуре 750С, падение напряжения в контакте щетки – коллектор ΔU принимается неизменным (1,5…2 В). Исходя из этого,
 . (29)
. (29)
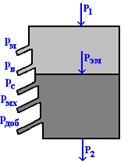
Рисунок 17
Потери в цепи якоря двигателя последовательного возбуждения состоят из потерь в сопротивлениях обмотки якоря rя, добавочных полюсов rд.п, последовательной обмотки rп.о и потерь в контакте щетки – коллектор ΔU:
 . (30)
. (30)
Потери в сопротивлении цепи возбуждения двигателя параллельного возбуждения
 . (31)
. (31)
Вращение сердечника якоря, обусловливает потери мощности в стали рс при перемагничивании: на гистерезис (потери пропорциональны частоте перемагничивания и наибольшей магнитной индукции в степени, близкой ко второй); на вихревые токи (потери пропорциональны частоте перемагничивания и магнитной индукции в квадрате). Двигатели параллельного возбуждения работают в большинстве случаев при малоизменяющихся скоростях вращения и магнитных потоках, поэтому эти потери можно считать неизменными. У двигателей с последовательным возбуждением произведение скорости вращения на магнитный поток остается примерно неизменным, что определяет некоторое уменьшение потерь при увеличении нагрузки. Вихревые токи и гистерезис оказывают тормозящее действие на якорь.
Механические потери рмх обусловлены трением вала якоря в подшипниках, трением щеток по коллектору при вращении, трением якоря в воздухе и вентиляционным действием при вращении якоря и вентилятора двигателя. Эти потери при малоизменяющейся скорости вращения остаются неизменными.
Добавочные потери рдоб принимаются равными 1% от мощности двигателя, в них учитываются различные трудноопределимые потери: потери в полюсных наконечниках, обусловленные пульсациями магнитного поля, и пр.
В потери холостого хода рх.х входят потери рс, рмх и рдоб:
 . (32)
. (32)
После вычитания из значения подводимой мощности Р1 потерь рм и рв получим электромагнитную мощность Рэм, передаваемую якорю, равную произведению электромагнитного момента Мэм на частоту вращения ω:
 . (33)
. (33)
Мощность на валу двигателя
 . (34)
. (34)
ЛИТЕРАТУРА
Основная
8. Касаткин В.С., Немцов М.В., Электротехника. - М.; Энергоатомиздат, 2000.
9. Основы промышленной электроники /Под ред. В.Г. Герасимова.- М.: Высшая школа, 1985.
10. Основы теории цепей; Учебник для ВУЗов. /В.П. Бакалов и др. 2-ое изд. перераб. и доп. – М.; 2000.
11. Сборник задач по электротехнике и основам электроники / Под ред. В.Г. Герасимова.- М.: Высшая школа, 1987.
12. Прянишников В.А. Электроника. - СПб; Корона принт, 2002.
13. Хоровиц П., Хилл У.. Искусство схемотехники.- М.: Мир, 1997.
14. Амочаева Г.Г. Электронный конспект лекций.
Дополнительная
6. Алексеенко А.Г., Шагурин Н.И. Микросхемотехника. Учебное пособие для вузов.- М.: Радио и связь, 1990.
7. Жеребцов И.П. Основы электроники.- Л.: Энергоатомиздат, 1990.
8. Попов В.П., Основы теории цепей.- Учебник для ВУЗов.- 3-е изд. испр.-М.: Высшая школа, 2000.
9. Электротехника и электроника в экспериментах и упражнениях: Практикум на Electronics Workbench. в 2-х томах, Под ред. Д.И. Панфилова ДОДЭКА, 1999.-т.1-Электроника.
10. Электротехника/Ю.М. Борисов, Д.Н. Липатов, Ю.Н. Зорин. Учебник для вузов.- 2-е изд., перераб. и доп.- М.: Энергоатомиздат, 1985.
Лекция №29-30
Электропривод
План лекции
1. Общие сведения.
2. Понятие об электроприводе.
3. Режимы работы электродвигателей. Выбор мощности.
4. Релейно-контакторное управление электродвигателями.
Общие сведения.
Электропривод – электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Теория электропривода охватывает многие вопросы, знание которых позволяет рассчитать и выбрать элементы электропривода, а также разработать схему автоматического управления как двигателем, так и всем производственным процессом в соответствии с технологическими требованиями.
К этим вопросам относятся:
- механические характеристики электроприводов в двигательном и тормозном режимах;
- регулирование частоты вращения электроприводов;
- переходные процессы в электроприводах;
- расчет пусковых, тормозных и регулировочных резисторов;
- определение мощности электродвигателя и выбор его по каталогу;
- разработка схемы управления двигателем и всем производственным процессом;
- выбор электрической аппаратуры управления.
Переходным процессом называется процесс перехода электропривода от одного установившегося состояния к другому, когда одновременно изменяются скорость, момент и ток двигателя, а также скорость и моменты всех звеньев кинематической цепи, соединяющей двигатель с рабочим органом механизма.
К переходным процессам относятся пуск, торможение и реверс электропривода, переход с одной скорости на другую, а также процессы, вызванные изменениями момента на валу двигателя, изменением напряжения сети.
Потери в двигателе при пуске и торможении могут оказаться соизмеримыми с потерями в установившихся режимах. Поэтому при определении мощности двигателя необходимо учитывать потери при пуске и торможении, особенно когда число пусков и торможений в час относительно велико.
Характер и длительность переходного процесса определяются моментом двигателя, моментами сил сопротивления, массами и моментами инерции движущихся тел.
Определение мощности двигателя для производственного механизма выполняется в соответствии с нагрузкой на его валу по условиям нагрева. После того как двигатель выбран по условиям нагрева по каталогу, его проверяют по перегрузочной способности и условиям пуска. Необходимо выбрать такой двигатель по номинальной мощности, при которой он бы нагревался за время работы до температуры, не превосходящей допустимую. Превышение допустимой температуры приводит к потере изоляцией электрической и механической прочности и к выходу двигателя из строя.
Завышение мощности двигателя связано с дополнительными капитальными затратами, увеличением расхода энергии, а для асинхронных двигателей – с ухудшением коэффициента мощности.
Защита силовых цепей и двигателя от коротких замыканий осуществляется плавкими предохранителями, защита двигателя от перегрева, вызванного перегрузками – тепловым реле. Включение и отключение двигателя производится электромагнитным аппаратом – контактором. В некоторых случаях вместо контактора используются автоматы или бесконтактные схемы включения на тиристорах.
Дата добавления: 2016-02-16; просмотров: 2643;