Если условно представить текущие значения uS через US, то получим
 , (14.9)
, (14.9)

где  - угол относительного сдвига фаз между роторами синхронизируемых генераторов;
- угол относительного сдвига фаз между роторами синхронизируемых генераторов;
 - угловая скорость скольжения.
- угловая скорость скольжения.
При разности амплитуд напряжений ΔU=U1-U2, равенстве угловых скоростей  и совпадении фаз
и совпадении фаз  имеет место реактивный уравнительный ток, поскольку сопротивления генераторов в основном индуктивные, а сопротивления соединительных линий в СЭС пренебрежимо малы, и уравнительный ток отстает на 90° от вектора разности напряжений (рис.14.3). Некоторая разность напряжений (до 6-8% UН) генераторов допускается для более быстрого включения генераторов на параллельную работу. При этом броски тока относительно малы и можно упростить схемы и устройства синхронизации.
имеет место реактивный уравнительный ток, поскольку сопротивления генераторов в основном индуктивные, а сопротивления соединительных линий в СЭС пренебрежимо малы, и уравнительный ток отстает на 90° от вектора разности напряжений (рис.14.3). Некоторая разность напряжений (до 6-8% UН) генераторов допускается для более быстрого включения генераторов на параллельную работу. При этом броски тока относительно малы и можно упростить схемы и устройства синхронизации.
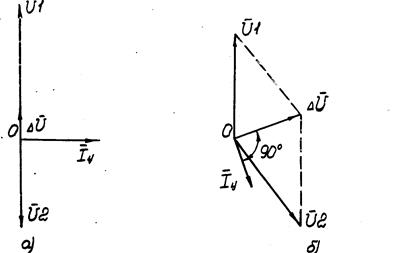
Рис. 14.3. Диаграмма эдс, образующих уравнительный ток
Наличие сдвига фаз Θ1≠ Θ2 между напряжениями при и U1=U2 создает главным образом активный уравнительный ток. На рис. 14.3, б показан векторная диаграмма напряжений, соответствующая включению при сдвиге фаз.
Уравнительный ток отстает по-прежнему на 90° от разности напряжений ΔU, поскольку сопротивление статорных обмоток значительно больше активного, а сопротивление соединительных линий пренебрежимо мало. Однако по отношению к векторам напряжений синхронизируемых генераторов его вектор расположен под углом, отличным от 90°, и поэтому имеет активную составляющую, вызывая толчки активной мощности в момент включения генераторов.
Еще большие толчки активной мощности возникают в случае включения генераторов на параллельную работу при неравенстве угловых скоростей, т.е. при  . В этом случае один из агрегатов будет иметь некоторый запас избыточной кинетической энергии относительного движения, который определяется выражением
. В этом случае один из агрегатов будет иметь некоторый запас избыточной кинетической энергии относительного движения, который определяется выражением
 , (14.10)
, (14.10)
где Tj – механическая постоянная времени инерции вращающихся частей агрегата.
Под действием запаса кинетической энергии возникает уравнительная активная мощность, определяемая значениями тока и эдс, сверхпереходного, а затем переходного процессов. Уравнительная мощность вызывает вращающий момент на валу одного из генераторов (тормозной у другого), превышающий номинальный в несколько раз. При синхронизации генераторов в этих условиях могут возникать поломки соединительных муфт и редукторов, а также другие механические повреждения, приводящие к замене генераторов или агрегатов в целом.
Включение в противофазе или с большим углом рассогласования фаз может вызвать аварию коммутационной аппаратуры, сопровождающуюся пожароопасными последствиями в ГРЩ из-за действия в цепи двойного напряжения в начальный момент включения.
Таким образом, при синхронизации СГ необходимо стремиться к выполнению идеальных условий синхронизации.
2. Методы синхронизации
Синхронизация синхронных генераторов в СЭС может осуществляться методами точной синхронизации, грубой синхронизации (через реактор) и самосинхронизации. Области применения этих методов зависят от целого ряда факторов: назначения электроэнергетических установок, принятых схем генерирования и распределения электрической энергии, а также состава оборудования СЭС и их параметров.
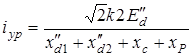
Приближенную сравнительную оценку методов синхронизации можно дать, используя выражение для наибольшего возможного значения уравнительного тока без учета затухания в момент замыкания статорных цепей генераторов с успокоительными обмотками:
 , (14.11)
, (14.11)
где E''d1= E''d2= E''d – продольные эдс соответственно генераторов СГ1 и СГ2 за сверхпереходными индуктивными сопротивлениями;
k – коэффициент, учитывающий апериодическую составляющую тока (для судовых систем принимают равным 1.6-1.9);
x''d1, x''d2 – сверхпереходные индуктивные сопротивления по продольной оси синхронизируемых генераторов;
xC – эквивалентное индуктивное сопротивление элементов сети, соединяющих синхронизируемые генераторы;
δ0 – начальный угол сдвига фаз между E''d1 и E''d2.
Точная синхронизация
Этот метод следует считать основным для включения СГ на параллельную работу. На рис.14.4 представлена принципиальная схема точной синхронизации генераторов.

Рис.14.4. Схема точной синхронизации
Включение генераторов производится в следующей последовательности (предположим генератор СГ1 работает, а генератор СГ2 подключается):
1. Автоматические, благодаря работе АРВ или с помощью регуляторов уставки напряжения РУ1, 2 в схеме автоматического регулятора напряжения СГ по вольтметрам V уравнивают напряжения генераторов. Считается, что во всех случаях лучше, когда величины напряжения и частоты у подключаемого генератора несколько выше на 2-3%, чем у работающего. При этом после подключения генератор сразу возьмет некоторую нагрузку, разгрузит работающие генераторы и лучше втянется в синхронизм. В противном случае подключаемый генератор будет работать в двигательном режиме, потребляя некоторую мощность, и, следовательно, дополнительно нагрузит работающий генератор.
2. Воздействуя на серводвигатель СД2, который механически связан с регулятором подачи энергоносителя, с помощью переключателя питания серводвигателя ПСД2 производят изменение подачи энергоносителя (топлива, пара или газа) первичного двигателя генератора ПД2 и тем самым уравнивают частоты вращения генераторов, контролируя это по частотомерам H2.
3. Одним из переключателей синхроноскопа (в нашем случае П3) включают одну обмотку синхроноскопа S на шины электростанции, а другую – на напряжение подключаемого генератора СГ2. Путем изменения подачи энергоносителя первичного двигателя генератора СГ2 добиваются наиболее медленного вращения стрелки синхроноскопа (т.е. минимальной разности частот генераторов) и в момент, когда стрелка прибора проходит отметку, соответствующую совпадению напряжений генераторов по фазе, включают автомат А3 генератора СГ2 на шины ГРЩ. Этот момент соответствует углу δ0=0, и поэтому уравнительный ток по выражению (14.11) будет равен нулю (или будет очень малым при малых углах δ0).
Вместо синхроноскопа при точной синхронизации можно использовать сигнальные лампы (ЛС1, 2, 3 на рис. 14.5).
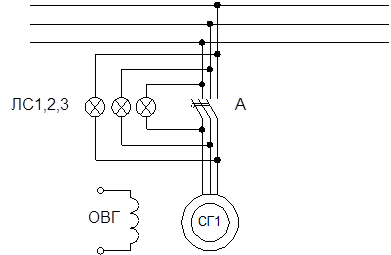
Рис. 14.5. Схема подключения сигнальных ламп для осуществления точной синхронизации
Моменту подключения СГ на шины ГРЩ соответствует погасание всех трех сигнальных ламп ЛС1, ЛС2, ЛС3. Эти лампы погаснут, когда напряжения синхронизируемых генераторов совпадут по амплитуде, частоте и фазе (т.е. DU=0, d =0) (рис. 14.6).
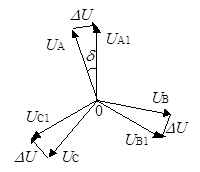
Рис. 14.6. Напряжения синхронизируемых генераторов
Осуществление точной синхронизации генераторов требует от обслуживающего персонала опыта и затраты определенного времени. Ошибка оператора при синхронизации может привести к тому, что включение произойдет при углах, близких к δ0/2=90°, и тогда выражение (14.11) примет вид
 . (14.12)
. (14.12)
При неточном включении могут быть броски тока (данные могут быть получены расчетом получены расчетом по выражению (14.11) и подтверждены экспериментами), превышающие 15-кратные от номинального тока генератора. Такие большие токи представляют опасность для генераторов и ГРЩ в силу больших электродинамических и тепловых нагрузок, а также вызывают большие колебания напряжения в сети.
В таком случае подключаемый генератор может не втянуться в параллельную работу, а работавшие потребители электроэнергии могут отключиться от ГРЩ.
Для того, чтобы исключить возможные ошибки обслуживающего персонала, процесс включения генераторов способом точной синхронизации в большинстве случаев автоматизируется.
Грубая синхронизация
Отличается она от точной тем, что при подключении генератора не проверяется равенство относительного сдвига фаз, а для ограничения величины уравнительного тока между работающими и подключаемым генераторами вводится добавочное реактивное сопротивление xP>>x''d1+x''d2 (рис.14.7).
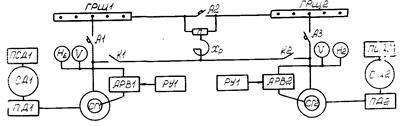
Рис. 14.7. Схема грубой синхронизации
Грубая синхронизация генераторов осуществляется в следующем порядке:
1. Уравнивают напряжения и частоты генераторов, пользуясь теми же аппаратами и приборами, что и при точной синхронизации.
2. Замыкают контакт К2 и тем самым включают генератор СГ2 на параллельную работу с СГ1 через реактор xP (автоматы А1 и А2 включены, переключателем П реактор включен на шины ГРЩ2).
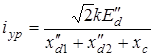
3. После спадания первоначального броска тока и уменьшения колебаний напряжения генераторов включают автомат А3 генератора и размыкают контакт К2. Обычно генераторный автомат включаемого генератора включается через 3-5 с после включения реактора. При грубой синхронизации включение генераторов на параллельную работу возможно при значениях начальных углов сдвига фаз δ0, близких к 180°. Максимально возможное значение уравнительного тока между генераторами в этом случае определяется выражением
 . (14.13)
. (14.13)
Величину сопротивления реактора xP следует выбирать значительно превышающей сумму сопротивлений генераторов с таким расчетом, чтобы бросок тока не приводил к провалам напряжений больше допустимых значений (ΔU≤20%UН).
Благодаря этому допустимы большие величины углов рассогласования роторов машин, что существенно упрощает процесс синхронизации и сокращает время его осуществления. Недостатком метода является необходимость в наличии дополнительных устройств (реактивного сопротивления и включающих его аппаратов), усложняющих схему и увеличивающих массу и габариты СЭС. Несмотря на эти недостатки, метод грубой синхронизации нашел широкое применение в СЭС с небольшой мощностью источников электроэнергии. Автоматизация грубой синхронизации осуществляется более простыми средствами по сравнению с точной.
Самосинхронизация
Схема включения генераторов на параллельную работу этим методом представлена на рис. 14.8.
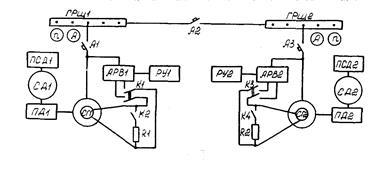
Рис. 14.8. Схема самосинхронизации
При этом выполняются следующие операции:
1. Подключаемый генератор запускается и разгоняется до частоты вращения, близкой к синхронной. При этом обмотка возбуждения генератора замкнута на сопротивление R, в 10-20 раз превышающее собственное сопротивление, и отключена от источника питания (контакт К4 замкнут, К3 разомкнут). Частота вращения контролируется по тахометру n.
2. С помощью автомата А3 генератор СГ2 включается на шины ГРЩ.
3. После спадания первоначального броска тока замыкается контакт К3 и размыкается К4. Эта операция, как правило, выполняется автоматически вслед за второй операцией с небольшой выдержкой времени, величина которой регулируется применительно к типу генераторов.
После выполнения второй операции неизбежен бросок уравнительного тока, определяемого выражением
 . (14.14)
. (14.14)
По существу это равносильно включению на шины ГРЩ асинхронного двигателя, и величина уравнительного тока достигает 5-7 кратного значения номинального.
В отличие от двух предыдущих методов синхронизации, при самосинхронизации подключаемый генератор к моменту замыкания контактов автомата А3 возникает асинхронный момент, который создается вследствие неравенства между частотой вращения ротора и частотой вращения поля статора токами в успокоительной короткозамкнутой обмотке ротора и обмотке возбуждения, замкнутой на сопротивление R2.
Под действием асинхронного момента частота вращения включенного генератора будет приближаться к синхронной. После включения питания обмотки возбуждения появится синхронный момент, под действием которого ротор включенного генератора втягивается в синхронизм.
При включении этим методом на параллельную работу генераторов одинаковой мощности провал напряжения достигает 30-40 %UН, полное время восстановления напряжения равно нескольким секундам. Метод самосинхронизации может найти применений на малых и вспомогательных судах, когда в СЭС допустимо появление глубоких, кратковременных провалов напряжения.
3. Автоматическая синхронизация
На современных судах включение СГ на параллельную работу производится, как правило, методом точной синхронизации с использованием автоматических синхронизаторов, которые контролируют выполнение условий синхронизации, подгоняют частоту вращения включаемого генератора к частоте сети, включают генераторы на параллельную работу. На практике получили распространение две системы автоматической точной синхронизации: с постоянным углом опережения, с постоянным временем опережения.
В синхронизаторах, действующих по первому принципу, устройство срабатывает при одном и том же значении угла опережения по отношению к моменту, когда напряжение биения равно нулю независимо от величины скольжения. Для этого чувствительный элемент настраивается на определенное значение напряжения биения uб1 при частоте fб1 (рис. 14.9). При подаче такого сигнала на вход системы но истечении времени tсхр (собственное время синхронизатора) происходит воздействие на привод автомата, подключающего генератор к шинам. Замыкание контактов автомата произойдет через промежуток времени tсрб, определяемый временем его срабатывания.
Следовательно, если для данной частоты напряжения биения импульс на срабатывание будет дан в точке А (см. рис. 14.9), т. е. с учетом времени tсхр+tсрб , контакты автомата замкнутся в точке С, где uб1=0. Из рисунка видно, что напряжение uб1=0 соответствует углу j1, называемому углом опережения. Если частота биения fб2 меньше fб1, то синхронизатор получит импульс в точке А', определяемой, как и в первом случае, напряжением uб1. По истечении времени tсхр+tсрб контакты генераторного автомата замкнутся. Это приведет к подключению генератора к шинам при напряжении биения Duб, определяемой точкой с', и к возникновению уравнительного тока.
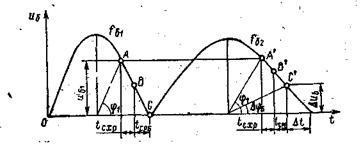
Рис. 14.9. К пояснению принципа постоянства угла опережения
Из сказанного ясно, что принцип постоянства угла опережения не обеспечивает слежения за частотой напряжения биения, вследствие чего генератор к шинам при uб = 0 можно подключить только при одной вполне определенной частоте напряжения биения.
Вместе с тем постоянство угла опережения весьма просто обеспечивается одним и тем же значением напряжения биения, что обусловливает простоту схемы такого автоматического синхронизатора.
Синхронизатор, действующий по принципу постоянства времени опережения, исключает указанный выше недостаток, так как в схему синхронизатора вводится элемент, реагирующий в зависимости от значения частоты скольжения и осуществляющий коррекцию, в результате которой время tсхр+tсрб остается постоянным. Так, например, если синхронизатор срабатывает при частоте скольжения fб1, напряжении uб1 и угле j1 (рис. 14.10), то при частоте fб2<fб1 он должен срабатывать при напряжении uб2< uб1 и угле j2<j1. В этом случае время опережения tсхр+tсрб остается неизменным и подключение генератора к шинам произойдет при uб≈0 независимо от частоты скольжения.
Момент времени, соответствующий срабатыванию, может определяться различными способами: сравнением напряжения биения и напряжения, пропорционального производной от него, преобразованием угла в пропорциональное ему напряжение постоянного тока и другими способами.
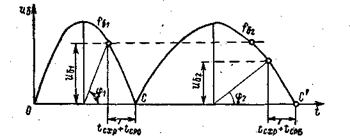
Рис. 14.10. К пояснению принципа постоянства времени опережения
Автоматический синхронизатор, выполненный на полупроводниковых элементах автоматики, представлен функциональной схемой, изображенной на рис.14.11, где
ФЭ – функциональные элементы, которые включают в себя два трансформатора линейных напряжений (работающего и подключаемого генераторов), трансформатор напряжения биений, трансформатор питания элементов схемы, выпрямители, дифференцирующие конденсаторы, резисторы различного назначения;
БП – блок питания, представляющий собой выпрямительный мост, который обеспечивает питанием все элементы автоматического синхронизатора;
БКН – блок контроля напряжений, контролирует равенство действующих значений работающего и включаемого генераторов и формирует сигнал, проходящий через блок контроля частоты на блок разрешения и запрета;
БКЧ – блок контроля частоты, контролирует величину частоты fS напряжения биений (т. е. равенство частот вращения роторов генераторов и скорость изменения этого равенства) и формирует сигнал на блок разрешения и запрета БРЗ;
БФО – блок формирования опережения, контролирует наступление момента равенства мгновенных значений напряжений генераторов и скорость изменения напряжения биений, формирует опережающий сигнал на БРЗ с регулируемым временем опережения tОП;
БРЗ – блок разрешения и запрета, формирует сигнал на срабатывание автомата, включающего генераторы на параллельную работу. Разрешает включение при равенстве действующих значений напряжений, равенстве частот, при медленном изменении этого равенства, наличии сигнала о подходе к зоне разрешенного включения с опережением времени tОП. БРЗ не допускает (запрещает) прохождение сигнала на включение автомата при нарушении хотя бы одного из условий синхронизации, а также при случайном, кратковременном равенстве частот и напряжений;
БВ – блок выходной, представляет собой полупроводниковый усилитель и реле, включающее своими контактами цепь питания включающего устройства автомата.
Комплект, состоящий из БКН, БКЧ, БФО, БРЗ и БВ, называют устройством синхронизации (УС) и монтируют на отдельной панели.
Остальные элементы схемы объединяют в устройство подгонки частоты (УПЧ), предназначенное для подгонки частоты синхронизируемых генераторов. УПЧ имеет два одинаковых канала, один из которых включает серводвигатель (СД) на увеличение энергоносителя первичному двигателю (ПД) подключаемого генератора, второй – на уменьшение энергоносителя ПД.
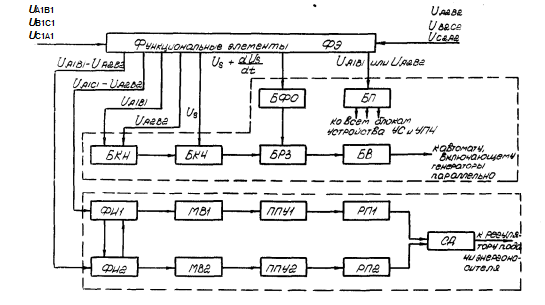
Рис.14.11. Функциональная схема автоматического синхронизатора
Оба эти канала в своем составе имеют ФИ1, ФИ2 – формирователи импульсов, на вход которых подаются две разности напряжений работающего и подключаемого генераторов, взаимное расположение которых во времени зависит от соотношения частот работающего и включаемого генераторов (рис.14.12).
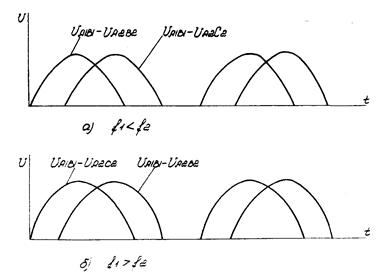
Рис. 14.12. Диаграмма напряжений, формирующих сигналы на блок подгонки частоты
Если частота включаемого генератора f2<f1, то сигнал на ФИ1 приходит раньше, чем на ФИ2. Этот сигнал, пройдя все элементы первого канала УПЧ, включает СД на увеличение подачи энергоносителя и одновременно блокирует (исключает) прохождение сигнала по второму каналу. Если же f2>f1, то раньше проходит сигнал на ФИ2. Этот сигнал, пройдя все элементы второго канала УПЧ, включает СД на уменьшение подачи энергоносителя и одновременно блокирует прохождение сигнала по первому каналу;
МВ1, МВ2 – мультивибраторы, с помощью которых выбирают время включения промежуточных реле РП1, РП2 в каждом цикле биений;
ППУ1, ППУ2 – полупроводниковые усилители мощности;
РП1, РП2 – промежуточные реле, включающие серводвигатель на передний или задний ход;
СД – серводвигатель, изменяющий положение исполнительного органа, регулирующего подачу энергоносителя в первичный двигатель.
Таким образом, УПЧ подгоняет частоту включаемого генератора к частоте работающего, УС контролирует соблюдение условий синхронизации, формирует время опережения tОП и включает автоматом генераторы на параллельную работу при соблюдении условий синхронизации, следовательно, при минимальных толчках уравнительного тока.
Преимуществом автоматической синхронизации является быстрота выполнения операций, малые броски тока при включении автомата параллельной работы СГ.
Недостатки: сравнительная сложность схем, относительно высокая стоимость их особенно с учетом дублирования для повышения надежности.
Одной из отличий старых устройств, производящих автоматическую синхронизацию, является относительно большое время подгонки частоты подключаемого генератора fП к частоте работающего генератора fР. Это обусловлено тем, что управляющий сигнал на подгонку частоты формируется в виде импульса один раз за период биений практически независимо от разности частот Df=fП- fР синхронизируемых генераторов. В результате при малой разности частот (|Df|<0,2 Гц) во избежание явления "зависания" приходится искусственно увеличивать разность частот генераторов с помощью устройства синхронизации. Кроме того, у этих устройств в интервале разности частот, где разрешено создание сигнала на включение автоматического выключателя, продолжает формироваться сигнал на подгонку частоты. Это также может привести к затягиванию процесса синхронизации или к ошибке в определении момента посылки сигнала на включение автоматического выключателя.
Кроме того в старых устройствах синхронизация осуществляется как при положительном, так и при отрицательном скольжении, т. е. при Df>0 и при Df<0. В то же время опыт показывает, что при подключении ненагруженного генератора с отрицательным скольжением процесс синхронизации может быть нарушен. В этом случае подключаемый генератор может перейти в двигательный режим, дополнительно нагружая работающий генератор и потребляя мощность, достаточную для срабатывания защиты от обратной мощности. Для устранения этого явления следует осуществлять синхронизацию "сверху", т. е. при положительном скольжении (Df>0).
Заключение
Современные устройства автоматической синхронизации генераторов строятся на базе микропроцессорной техники. Изучение синхронизации генераторов с помощью ЦВМ будет целью следующей лекции.
Дата добавления: 2016-02-02; просмотров: 1751;