Беспилотные авиационные системы и комплексы
Как уже указывалось в 1.2.1, необходимо различать понятия беспилотной авиационной системы (БАС) и беспилотного авиационного комплекса (БАК). Разница между ними заключается в том, что БАС является более широким понятием. БАК – это только совокупность материально‑технических средств, необходимых для выполнения определенных функций. БАК включает один или несколько беспилотных JIA, управляющее, транспортное оборудование, технические устройства, формирующие каналы связи и передачи информации, устройства обработки информации и др. [66].
Беспилотная авиационная система (БАС) включает в себя не только авиационный комплекс, но и дополнительные компоненты, формирующие связи различного вида между его элементами (рис. 1.80). Прежде всего это технический персонал и необходимое программное обеспечение (ПО). Еще один важный элемент БАС – средства интеграции с другими системами, позволяющие объединять несколько БАК в систему с единым управлением. Также в систему следует включить совокупность необходимой технической и регламентирующей документации [64].
Как правило, БАК поставляется с предприятия‑изготовителя заказчику в виде законченного комплекса, полностью готового к применению. Но при необходимости этот комплекс может расширяться и интегрироваться в другие системы за счет дополнительных аппаратных и программных средств. Например, в состав поставляемого тактического БАК могут входить: БПЛА, специальный тягач с установленной на нем стартовой катапультой, мобильный командный пункт, выносимые антенно‑фидерные устройства, включая ретрансляторы сигналов. Но этот комплекс может использовать не входящие в него: спутниковую систему глобального позиционирования, вспомогательный транспорт для перевозки людей и материальных ресурсов, ангары для хранения техники, инфраструктуру аэродромов включая радиолокационные средства и т.д. (рис.1.81).

Рис. 1.80. Обобщенная структура БАС
БПЛА, входящие в состав БАС и оснащенные соответствующей целевой нагрузкой, определяют ее специализацию. Среди гражданских систем наиболее распространены информационные, получающие в полете видео и фото данные, и передающие их на наземное оборудование для обработки. Для этого необходимо специализированное ПО, реализующее соответствующие алгоритмы.
Стартовые и посадочные средства могут включать в свой состав транспортные машины, пусковые установки, а также аппаратуру и оборудование для пред‑ и послеполетного контроля БПЛА. Эта часть комплекса обслуживается техническими расчетами, входящими в состав персонала БАС.
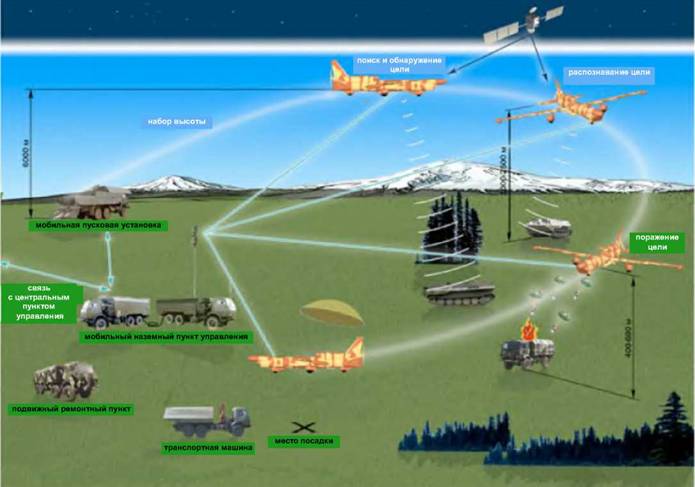
Рис. 1.81. Взаимодействие различных элементов БАС
Пункты управления, объединяющие в себе аппаратуру и оборудование для разработки программ полетов БПЛА, полетного контроля их технического состояния, радиокомандного управления выполнением полетных заданий, а также для сбора, обработки и передачи информации, функционируют с помощью расчетов управления, включающих в себя командира расчета и операторов соответствующих специализаций.
Пункты управления в зависимости от масштаба возложенных на систему задач различаются по организации и исполнению. Так, для управления БПЛА стратегического и тактического назначения чаще всего применяют стационарные пункты управления (рис. 1.82). Для управления БПЛА оперативного назначения целесообразно размещать пункты управления на мобильных платформах – на автомобилях (рис. 1.83) или кораблях, а для управления легкими аппаратами небольшого радиуса действия вообще чаще всего используют носимые портативные комплекты, быстро разворачиваемые и собираемые в полевых условиях (рис. 1.84).


Рис. 1.82. Примеры организации рабочих мест операторов на стационарных пунктах управления БАС

а

б

в
Рис. 1.83. Пример мобильного пункта управления (БАК "Дозор" – разработка ЗАО "Транзас", С.‑Петербург): а – комплекс в походном состоянии; б – рабочее место пилота‑оператора; в – пункт управления с развернутой антенно‑фидерной системой




Рис. 1.84. Управление малыми БПЛА в полевых условиях
Вспомогательные обеспечивающие средства предназначены для подготовки БПЛА к полету, обслуживания БПЛА после полета, проведения текущих регламентных и ремонтных работ, а также для хранения средств комплекса. Эта группа средств не входит в состав БАК, но обслуживается персоналом, входящим в состав технического расчета.
Планирование действий БАК
Хотя полезная нагрузка современных БПЛА может иметь самое разнообразное назначение, основной задачей при управлении функционированием БАК является планирование траекторий полета и пилотирование БПЛА по этим траекториям. С учетом того, что БАК имеет в своем составе, как правило, не один, а два и более БПЛА, а многие небольшие комплексы (включая пункты управления) мобильны, то возникает задача планирования действий нескольких подвижных компонентов.
Задачи первого типа в настоящее время хорошо проработаны, существует большое количество систем автоматического управления, управляющих как подсистемами, так и целыми БПЛА в программных и командных режимах [67]. Ко второму типу относятся принципиально иные задачи, и в первую очередь, задача планирования групповых действий мобильных объектов, суть которой заключается в определении действий каждого объекта в составе группы для достижения поставленной перед БАК цели.
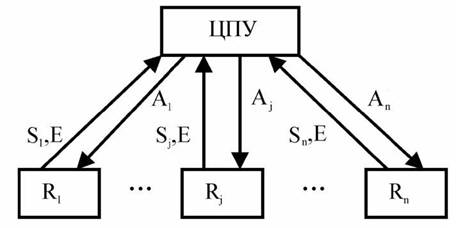
Один из подходов к решению такой задачи – представить весь комплекс как единый объект управления. В этом случае каждый компонент должен постоянно передавать в центральный процессорный узел (ЦПУ) информацию о своем текущем состоянии и текущем состоянии окружающей его среды [68]. На основе этой информации ЦПУ определяет текущие действия компонентов и передает команды на выполнение этих действий на их исполнительные системы (рис. 1.85, а).
Такой метод реализуется в настоящее время в глобальных станциях управления. Постоянная связь между всеми компонентами осуществляется через глобальные спутниковые системы. Координаты всех управляемых БПЛА (оснащенных аппаратурой спутниковой связи) непрерывно отслеживаются, а командные сигналы управляющей платформы транслируются на них. Таким образом, созвездие спутников выступает в роли двустороннего канала связи между управляющим и управляемыми компонентами.
а
б
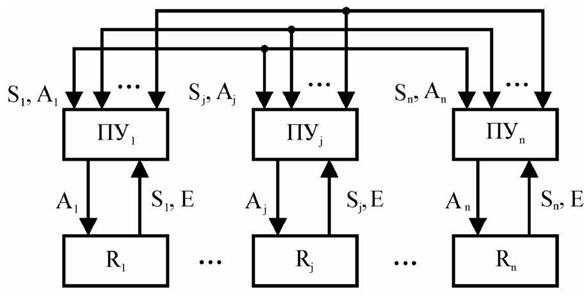
Рис. 1.85. Варианты структур системы планирования действий БАК: а) централизованная, б) распределенная;
Rj,j = 1,n – подвижные компоненты комплекса; Е – окружающая среда; Sj и Aj – вектор‑функции, описывающие текущее состояние и действия j ‑го компонента соответственно
Очевидно, что направление дальнейшего развития систем такого типа имеет преимущественно военное (государственное) значение. Соответственно, трудности решения многомерной задачи по управлению п мобильными объектами будут возложены на вычислительную машину, обладающую высочайшим быстродействием (и стоимостью), что трудно реализуемо в гражданских областях. При этом отметим так же, что сбои в работе центральной вычислительной машины или серьезные помехи, нарушающие связь объектов управления со спутниками могут повлечь за собой потерю контроля над управляемыми БПЛА.
Хорошим примером является единая автоматизированная система одновременного управления несколькими типами БПЛА ZaNET, разработанная компанией ZALA AERO (г. Ижевск), обеспечивает возможность пользователю управлять множеством БПЛА с любой точки земли (рис. 1.86). Использование системы целесообразно, когда место запуска БПЛА и место получения целевой информации с борта и управление им необходимо географически разнести.
ZaNET представляет собой единую автоматизированную систему управления тактическим БАК с возможностью интеграции в общую систему управления войсковыми соединениями.
Платформа позволяет управлять несколькими типами БПЛА одновременно, при этом отдельная оперативная группа посредством наземной станции управления (НСУ) может получать информацию (видео/фото) от беспилотных аппаратов, выполняющих полетное задание в другом районе и управляемых с другой НСУ, централизованно анализируя поступающую информацию для принятия оперативных решений. При этом НСУ интегрируется в сеть как сервер с защищенным доступом.
Все БПЛА и наземные станции управления связаны между собой посредством Ethemet‑радиоканала связи. Также доступно удаленное управление БПЛА с разделением прав пользователей [69].
Другим примером является проект SMAVNET (Swarming Micro Air Vehicle Network) швейцарского института EPFL в г. Лозанне [70]. Он посвящен созданию управляемых групп согласованно работающих малых беспилотных самолетов, которые могут обмениваться информацией между собой по протоколу ZigBee (рис. 1.87).
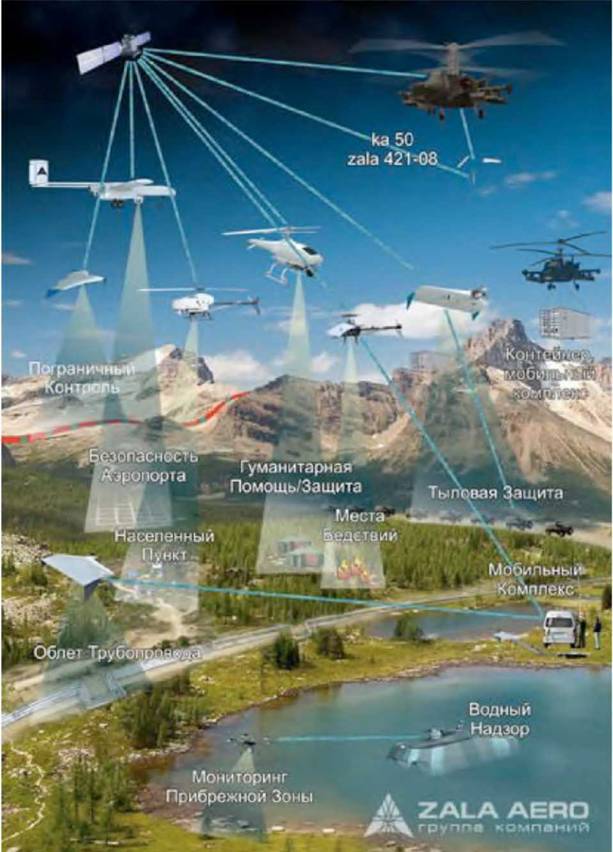
Рис. 1.86. Автоматизированная система ZaNET, предназначенная для одновременного управления несколькими типами БПЛА
Управление этими летающими роботами осуществляется централизованно; т.е. с наземного пункта управления команда передается на один из БПЛА, а затем она распространяется в "стае" благодаря локальной сети. На каждом самолете установлена мобильная платформа Toradex Colibri РХА270, а в качестве операционной системы используется Linux.
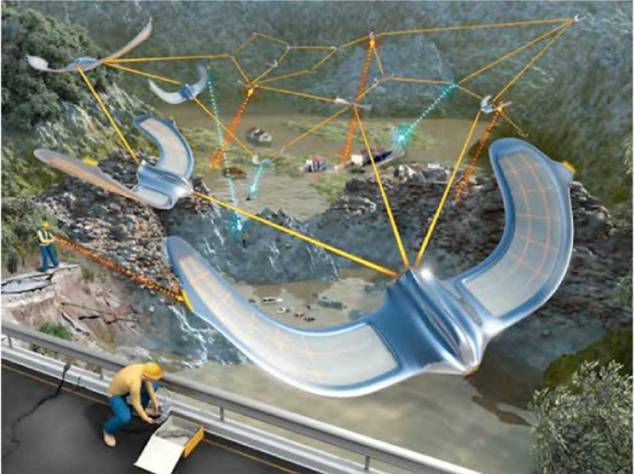
Рис. 1.87. SMAVNET – система управления "стаей" БПЛА на основе протокола ZigBee
К этому же классу централизованных управляемых систем можно отнести большую часть других часто упоминаемых в иностранной литературе "стай" (swarms). Часто в таких системах функцию ЦПУ выполняет смартфон или ноутбук [71]. Подобные примеры демонстрируют наряду с самой возможностью управления несколькими малоразмерными БПЛА с помощью одного портативного устройства проблему нехватки алгоритмического обеспечения для таких групповых полетов.
Существует другой подход планирования действий комплекса: каждый компонент должен самостоятельно решать задачу планирования своих действий на основе информации о текущей ситуации в среде, текущих состояниях и действиях других компонентов комплекса на небольшой интервал времени вперед [68].
Такой метод коллективного планирования действий может быть реализован с помощью распределенной (децентрализованной) системы, в которой каждый компонент Rj обладает своим процессорным узлом ПУj (рис. 1.85, б). Процессорные узлы всех компонентов комплекса связаны между собой информационными каналами по принципу «каждый с каждым», по которым передается информация о текущих состояниях Ј • остальных компонентов и выбираемых ими действиях.
Такой подход ориентирован на управление группой однотипных объектов, стремящихся выполнить одну общую цель. Объединение информационно‑управляющих комплексов нескольких БПЛА в единую сеть позволяет производить комплексную обработку всей получаемой информации, а распределенная структура системы повышает ее надежность [72]. Один из обязательных принципов траекторного управления такой группой состоит в соблюдении некоторых установленных дистанций между управляемыми БПЛА, как и то, что все они являются взаимозаменяемыми с точки зрения достижения поставленной перед комплексом цели. В более сложных ситуациях (различные БПЛА и закономерности их взаимодействия друг с другом) требуется более сложная система управления комплексом [73].
Дата добавления: 2016-01-30; просмотров: 7796;