Состав и характеристики оборудования
В состав оборудования для ионно-плазменного травления материалов входят следующие основные функциональные системы:
- система травления, служащая для проведения обработки пластин и состояния из рабочей камеры и расположенных внутри нее или присоединенных к ней снаружи электродов, экранов, подложкодержателей и автономных источников стимулирующих воздействий и химически активных частиц (ХАЧ). При использовании в процессе травления ХАЧ рабочая камера обычно называется реактором;
- газовая система, служащая для подачи требуемого потока газа (пара) или газовой смеси в рабочую камеру и в автономные источники стимулирующих воздействий и ХАЧ и состоящая из нескольких каналов, в состав которых входят фильтры, трубы, испарители, вентили, клапаны, измерители и регуляторы расхода газа, коллекторы и стабилизаторы давления;
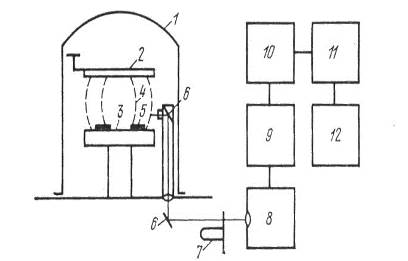
Рисунок 13.7 - Схема спектроскопического метода контроля:
1- вакуумная камера, 2- анод, 3- мишень, 4- плазма, 5- образцы, 6- зеркала, 7- модулятор, 8- монохроматор, 9- фотоумножитель, 10 – предусилитель, 11- фазочувствительный усилитель, 12- измерительный прибор или самописец.
- вакуумная система, служащая для обеспечения требуемого давления остаточных и рабочих газов в технологической и шлюзовой камерах, автономных источниках стимулирующих воздействий и ХАЧ и состоящая из вакуумных насосов, трубопроводов, клапанов, измерителей и регуляторов давлений и скоростей откачки, азотной ловушки, системы ее регенерации, фильтров или станций для очистки насосного масла, скрубберов или нейтрализаторов выхлопных газов;
- система возбуждения и поддержания плазмы разряда в рабочей камере, а также других стимулирующих воздействий в автономных источниках, состоящая из генераторов и источников электрических и магнитных полей, кабелей или волноводов, измерителей и регуляторов подводимой мощности, согласующих устройств;
- система загрузки-выгрузки пластин, транспортирования и позиционирования их внутри установки, состоящая из передающей и приемной кассет, устройств загрузки и перемещения пластин, шлюзовой камеры, подложкодержателей и прижимных устройств, датчиков положения пластин на различных позициях;
- система термостатирования испарителей, участков газовых каналов, электродов, подложкодержателей и стенок камер, служащая для измерения и регулирования их температуры и состоящая из термостатов, труб, хладо- и теплоагентов, устройств их перекачки, подачи и распределения, измерителей и регуляторов температуры;
- система контроля момента окончания процесса травления функционального слоя (времени травления), состоящая из индикаторов на основе эмиссионно-спектрального, лазерного интерферометрического или масс-спектрометрического методов, оптических и электронных устройств, а также специализированных микропроцессоров для обработки полученных сигналов по соответствующему алгоритму.;
- система управления, служащая для управления перечисленными выше системами контроля режимов их работы и исправности входящих в них устройств и состоящая из управляющей ЭВМ с программным обеспечением с клавиатурой ввода команд и дисплея.
К конструкционным характеристикам оборудования относятся: форма, материалы, размеры и взаимное расположение функциональных узлов и систем в составе установки, а также отдельных элементов в составе этих узлов и систем.
К основным характеристикам оборудования ВГПТ относятся:
1) рабочее давление (p) и диапазон его возможного изменения (∆p);
2) расход рабочего газа (смеси) (Q) и диапазон его возможного изменения (∆Q);
3) удельная мощность разряда (Руд) и диапазон ее возможного изменения (∆Руд) (в случае разряда постоянного тока характеристиками процесса являются сила тока (Iр) и напряжение разряда (Uр), а в случае радиационно-стимулирующего воздействия из автономного источника – сила тока и энергия пучка);
4) температура подложкодержателя (Тп) и диапазон ее возможного изменения (∆Тп) (температура обрабатываемой пластины Тпл в зависимости от теплового контакта может сильно отличаться от температуры подложкодержателя);
5) индукция магнитного поля (В) и диапазон ее возможного изменения (∆В);
6) напряжение смещения на подложкодержателе (Uсм) и диапазон его возможного изменения (∆Uсм) (в случае использования специального источника смещения);
7) угловая скорость (ω) или скорость перемещения (vпер) подложкодержателя и диапазоны их возможного изменения (∆ω) и (∆vпер) (в случае, если размеры зоны равномерного травления меньше размеров обрабатываемой пластины);
8) углы наклона подложкодержателя относительно потока химически активных частиц (γ) и (или) радиационно-стимулирующего воздействия (α) и диапазоны их возможного изменения (∆γ, ∆α);
9) остаточное давление в рабочей камере (pост) и диапазон его возможного изменения (∆рост);
10) частота электрического поля (f) и диапазон ее возможного изменения (∆f);
11) длительность импульса (tи) и период между импульсами (tм.и) для электрического поля или радиационно-стимулирующего воздействия.
Первые четыре характеристики относятся ко всем видам оборудования, а остальные – только к отдельным группам. Оператор или управляющая ЭВМ контролируют значение характеристик с помощью измерительных приборов и поддерживают их в требуемых технологических допусках с помощью прецизионных регуляторов.
К эксплуатационным параметрам оборудования относятся быстродействие, цикловая производительность, среднее время наработки на отказ.
Дата добавления: 2016-01-29; просмотров: 1137;