Е) Рабочие характеристики синхронного двигателя.
На рис. 4-84 представлены рабочие характеристики синхронного двигателя, полученные при постоянных напряжении и частоте сети и при постоянном возбуждении. По оси абсцисс здесь отложена полезная мощность Р2 (мощность на валу).
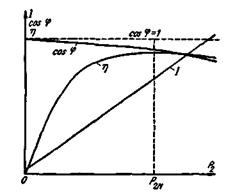
Рис. 4-84. Рабочие характеристики синхронного двигателя.
Если при холостом ходе установлен соs φ = 1, то при увеличении нагрузки он будет уменьшаться, что должно быть ясно из рассмотрения V-образных кривых двигателя (рис. 4-80) и их построения (рис. 4-79).
Подведенная мощность P1, больше мощности на валу Р2 на величину потерь в двигателе ∑P. Коэффициент полезного действия  в зависимости от Р2 изображается кривой, обычной для электрических машин.
в зависимости от Р2 изображается кривой, обычной для электрических машин.
На рис. 4-85 изображены кривые, показывающие, как изменяется cos φ с нагрузкой при различных значениях возбуждения. Кривая 1 аналогична кривой cos φ на рис. 4-84. Кривая 2относится к случаю, когда cos φ установлен равным единице при номинальной нагрузке. Эта кривая показывает, что cos φ при уменьшении нагрузки также уменьшается, но он будет соответствовать опережающему току, потребляемому двигателем из сети. Кривая 3 соответствует току возбуждения, который дает cos φ = l при Р2 = 0,5Р2н.
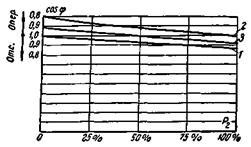
Рис. 4-85. Зависимость cos φ от нагрузки при различных возбуждениях.
Двигатели обычно рассчитываются для работы при номинальной нагрузке с cos φ = 0.9, соответствующим опережающему току. В этом случае машина будет служить не только в качестве двигателя, но и для улучшения cos φ всей электрической установки.
Применение нормальных синхронных двигателей только для улучшения cos φ (для работы в режиме компенсатора) в обычных случаях нецелесообразно, так как при такой работе и при допустимом (номинальном) токе возбуждения ток статора получается меньше номинального и, следовательно, машина не полностью используется.
Синхронные двигатели обычно выполняются с возбудителем, посаженным на один с ними вал. Поэтому при малых мощностях они менее выгодны, чем асинхронные двигатели. Но, начиная со 100 кВт, а при низких частотах вращения и с меньшей мощности, синхронные двигатели в ряде случаев следует предпочесть асинхронным двигателям. Применение в системах возбуждения полупроводниковых выпрямителей вместо машинных возбудителей позволяет получить достаточно экономичные синхронные двигатели и при сравнительно небольших мощностях.
Основное преимущества синхронного двигателя, как уже отмечалось, его высокий cosφ. Это преимущество приводит не только к повышению использования всей электрической установки, но и к уменьшению размеров синхронного двигателя по сравнению с асинхронным (при прочих равных условиях). Последнее объясняется тем, что размеры электрической машины определяются ее кажущейся мощностью, a не активной. Кажущаяся мощность синхронного двигателя при созφ = 1 меньше, чем асинхронного, в отношении 1 : cos φ. Это особенно заметно при сравнении тихоходных двигателей, так как cos φа тихоходного асинхронного двигателя имеет относительно небольшое значение.
Из других важных преимуществ синхронного двигателя отметим здесь возможность получить большой максимальный момент Мэм.м за счет увеличения воздушного зазора, так как при этом уменьшается синхронное сопротивление xd. Увеличение максимального вращающего момента асинхронного двигателя за счет увеличения воздушного зазора привело бы к значительному ухудшению его cos φ. К тому же максимальный вращающий момент синхронного двигателя зависит от напряжения в первой степени, тогда как тот же момент асинхронного двигателя пропорционален квадрату напряжения.
Дата добавления: 2016-01-29; просмотров: 2126;