Классификация машин.
Современное производство немыслимо без всевозможных высокоэффективных машин- устройств для преобразования энергии, движения, накопления и переработки информации.
Благодаря их использованию повышается производительность труда, облегчается физический и умственный труд человека и т. д.
По назначению машины условно подразделяются на три группы.
1.Энергетические машины, в которых какой-либо вид энергии ( тепловой, электрической и т.п.) преобразуется в механическую работу и наоборот. К этой группе относятся как машины двигатели (электродвигатели, тепловые и ядерные двигатели и т.п.), так и машины преобразователи ( компрессоры. электрические генераторы и др.).
2. Технологические или исполнительные машины, предназначенные для выполнения производственных процессов по изменению формы, свойств и положения объектов труда ( металлорежущие и ткацкие станки, полиграфические, швейные, горнодобывающие, транспортные и другие машины, роботы и т.п.).
3. Информационные машины, в которых происходит преобразование вводимой информации для контроля, регулирования и управления технологическими процессами.
Механизмы и их назначение.
Механизм-это часть машины, в которой рабочий процесс реализуется путём выполнения определённых механических движений.
Механизм – представляет собой систему подвижно связанных между собой материальных тел, предназначенных для преобразования движения и преодоления сил с помощью двигателя.
Механизм состоит из звеньев.
Звено - это одна или несколько деталей, движущихся как одно целое.
Деталь - это изделие, изготовленное без сборочных операций.
Два звена, подвижно связанных между собой, образуют кинематическуюпару.
ВИДЫ И УСЛОВНЫЕ ОБОЗНАЧЕНИЯ КИНЕМАТИЧЕСКИХ ПАР
По виду относительного движения звеньев кинематические пары делятся на плоские и пространственные.
По характеру контакта звеньев кинематические пары делятся на высшие и низшие. В высшей кинематической паре контакт звеньев происходит по линии или в точке. Одно звено относительно другого имеет возможность перекатываться и скользить. В низшей кинематической паре звенья касаются по поверхности (плоскость, цилиндрическая поверхность, сфера, винтовая поверхность).
В относительном движении звеньев при этом возможно лишь скольжение.
Кинематические пары классифицируют по числу Н степеней свободы в относительном движении (число независимых подвижностей) или по числу S условий связи (ограничений), накладываемой парой на движение одного звена относительно другого. Так как для свободного тела в пространстве число степеней свободы равно шести, то величины Н и S связаны соотношением Н = 6 - S, где S = 1,2,3,4,5. При S = 0 пары не существует, а имеются два независимых тела. При S = 6 пара становится жёстким соединением деталей, т.е. одним звеном.
Ниже даны примеры наиболее распространённых кинематических пар, варианты их условных изображений на схемах.
Одноподвижные кинематические пары (Н = 1)
а) плоская, низшая, вращательная пара (плоский шарнир) –рис.1.1.
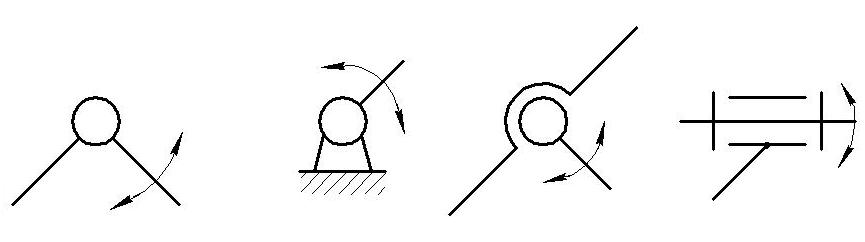
Рис.1.1
б) плоская, низшая, поступательная пара (рис.1.2).
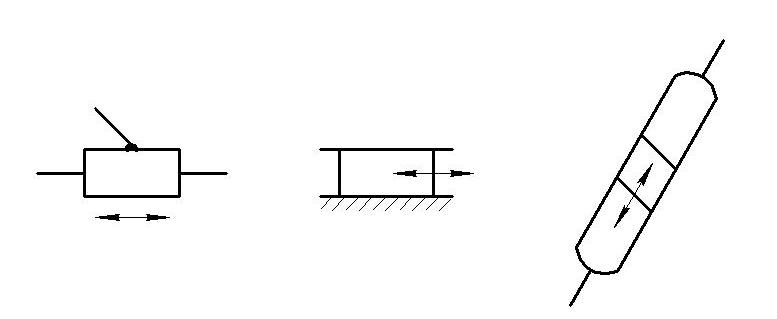
Рис.1.2
в) пространственная, низшая винтовая кинематическая пара (рис.1.3)
В данной паре (винт-гайка) вращательное и поступательное движения одного из звеньев связаны между собой.
Рис.1.3
Двухподвижные кинематические пары (Н = 2)
а) плоская высшая кулачковая кинематическая пара (рис.1.4)
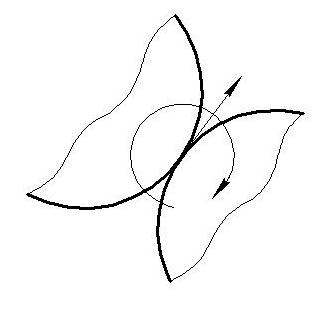
Рис.1.4
б) пространственная низшая кинематическая пара –цилиндрический шарнир (рис.1.5)
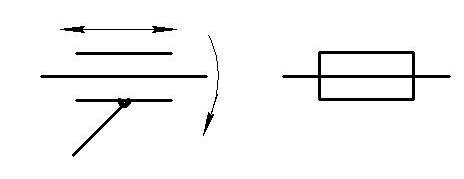
Рис.1.5
Трёхподвижные кинематические пары (Н = 3)
а) пространственная низшая кинематическая пара - сферический
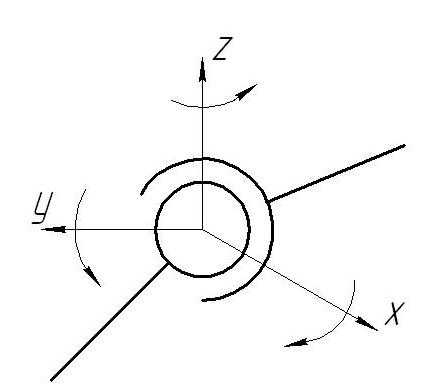 шарнир ( рис.1.6)
шарнир ( рис.1.6)
Данная пара допускает три независимых вращательных движения вокруг осей x , y, z.
Рис.1.6
б) пространственная высшая кинематическая пара (образуется при касании по линии двух цилиндрических поверхностей) –рис.1.7
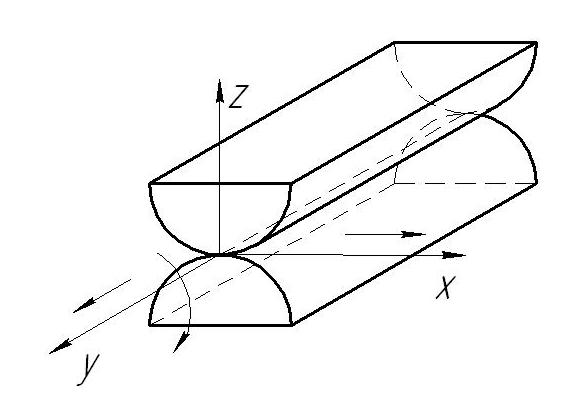 Рис.1.7
Рис.1.7
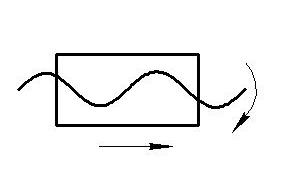
Пространственная высшая четырёхподвижная кинематическая пара ( Н=4)
Данная пара образуется при касании по линии цилиндрической поверхности и плоскости (рис.1.8).
ческая пара (
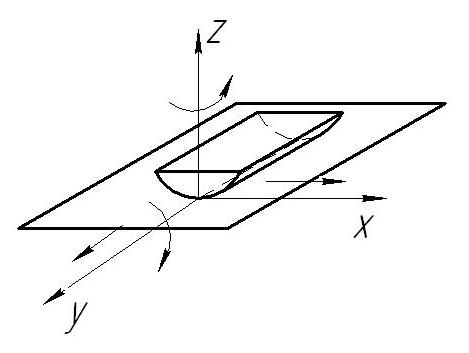
Рис.1.8
Пространственная высшая пятиподвижная кинематическая пара (Н = 5)
Данная кинематическая пара образуется при точечном контакте двух сфер или сферы и плоскости (рис.1.9).
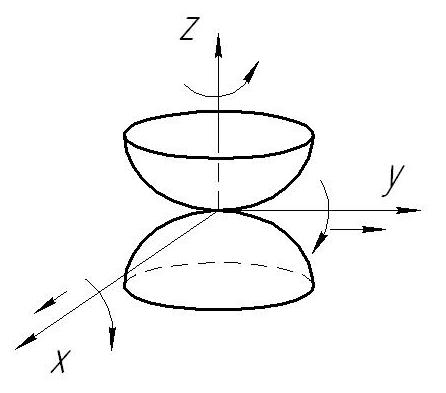 Рис.1.9
Рис.1.9
КИНЕМАТИЧЕСКИЕ ЦЕПИ, ОБРАЗОВАНИЕ МЕХАНИЗМА
Система звеньев, соединённых с помощью кинематических пар, называется кинематической цепью.
В зависимости от строения различают открытые и замкнутые цепи. В открытой цепи имеются звенья, входящие лишь в одну кинематическую пару (рис.1.10, а ). В замкнутой цепи (рис.1.10, б) каждое звено входит не менее чем в две кинематические пары.
Рис.1.10
Механизм можно получить из кинематической цепи, если о 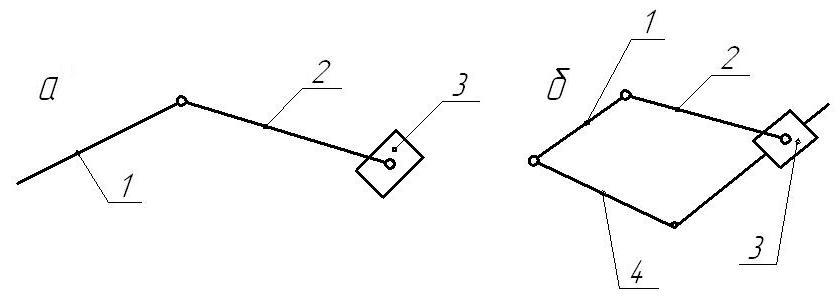 дно из звеньев сделать неподвижным относительно всех других звеньев, входящих в состав данной цепи. Это звено называют стойкой (корпус, станина, рама).
дно из звеньев сделать неподвижным относительно всех других звеньев, входящих в состав данной цепи. Это звено называют стойкой (корпус, станина, рама).
В механизме имеются входные и выходные звенья. Входному звену сообщается движение от двигателя. Выходное звено реализует движение, для которого предназначен механизм.
Механизмы могут иметь несколько входных или выходных звеньев. Например, дифференциал автомобиля при одном входном звене, получающем движение от двигателя, имеет два выходных звена, приводящих в движение колёса.
ОСНОВНЫЕ ВИДЫ МЕХАНИЗМОВ
По геометрическим и конструктивным признакам механизмы можно разделить на следующие группы:
1.Жёсткозвенные механизмы.
2.Механизмы с гибкими связями (ременные и цепные передачи).
3.Механизмы с упругими звеньями, деформация которых влияет на движение механизма.
4.Механизмы с остановками выходного звена (храповой механизм).
5.Гидромеханизмы.
6.Пневмомеханизмы.
7.Механизмы с электромагнитными и электронными элементами.
8.Комбинированные механизмы.
В данном курсе рассматриваются только жесткозвенные механизмы, в которых размеры звеньев в процессе работы не меняются ( если не учитывать упругие деформации).
Исходя из кинематических, конструктивных и функциональных свойств их подразделяют на рычажные, кулачковые, фрикционные, зубчатые и винтовые.
РЫЧАЖНЫЕ МЕХАНИЗМЫ
Эти механизмы образованы соединением звеньев с помощью вращательных (рис.11) и поступательных (рис.12) низших кинематических пар.
Далее приводятся схемы наиболее распространённых плоских рычажных четырёхзвенных механизмов. Более сложные механизмы могут быть получены путём присоединения к ним групп звеньев с помощью кинематических пар.
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ
Этот механизм может быть образован из замкнутой кинематической цепи (рис.1.10, б), если сделать неподвижным звено 4.
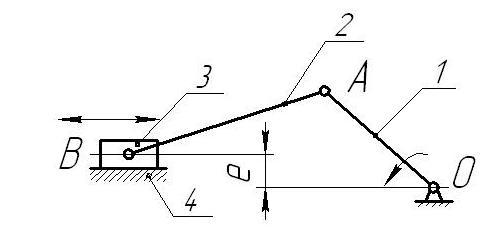
Рис.2.1
За наиболее часто применяемыми звеньями закреплены специальные названия:
1- кривошип, совершает вращательное движение;
2- шатун, совершает сложно-плоское движение, не имеет неподвижных точек. Он передаёт движение от входных (ведущих) звеньев к выходным (ведомым).
3- ползун, совершает возвратно-поступательное движение в неподвижных направляющих стойки 4.
Расстояние е называется эксцентриситетом. В частном случае, когда е=0,механизм называется центральным.
Эта схема наиболее распространена, так как используется в двигателях внутреннего сгорания.
При вычерчивании схемы механизма необходимо обеспечить возможность проворачивания кривошипа. Для этого должно быть выполнено условие: АВ > (ОА + е). С целью улучшения условий передачи сил длину шатуна назначают в 3-4 раза больше (ОА + е).
КУЛИСНЫЕ МЕХАНИЗМЫ
Механизм может быть образован из замкнутой кинематической цепи (рис.1.10, б), если сделать неподвижным звено 1 (рис.2.2).
Звено 3 в таком механизме называется кулисой. Она образует низшую поступательную кинематическую пару со звеном 2, которое, в данном случае, называется кулисным камнем.
Если ОА < ОК, то кулиса совершает качательное движение, если ОА > ОК-вращательное.
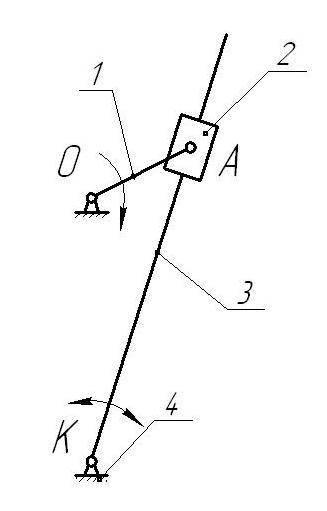
Рис.2.2
При замене вращательной пары 3 - 4 на поступательную получим кулисный механизм с поступательно движущейся кулисой (рис.2.3).
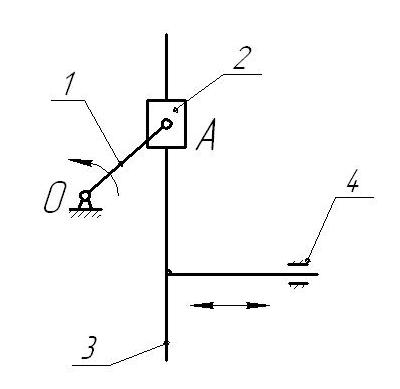
Рис.2.3
Если в кинематической цепи (рис.1.10, б) неподвижным сделать звено 2, то получается другой вариант (рис.2.4) кулисного механизма с качающейся кулисой 3.
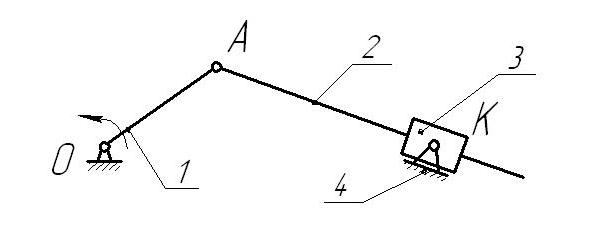
Рис.2.4
МЕХАНИЗМ ШАРНИРНОГО ЧЕТЫРЁХЗВЕННИКА
Этот механизм образуется с использованием только низших вращательных кинематических пар. Выходное звено ВК в таком механизме может качаться или вращаться (в зависимости от выбранных размеров звеньев). В первом случае (рис.2.5) выходное звено 3 называется коромыслом. Во втором случае (рис.2.6) выходное звено также кривошип, а механизм называется двухкривошипным.
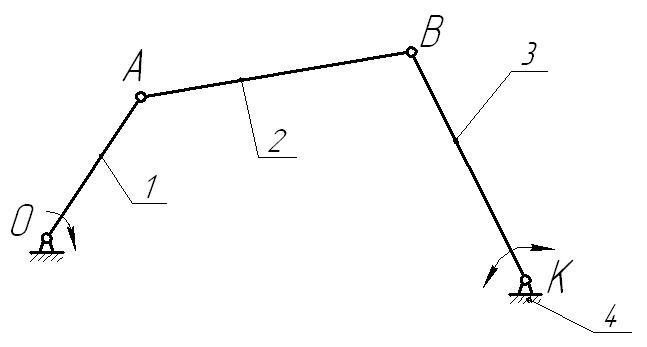 1-кривошип
1-кривошип
2-шатун
3-коромысло
4-стойка
Рис. 2.5
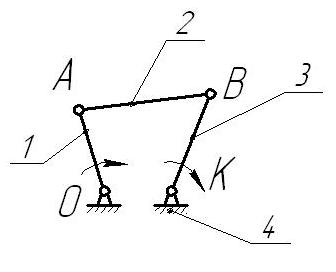
1-кривошип
2-шатун
3-кривошип
4-стойка
Рис.2.6
КУЛАЧКОВЫЕ МЕХАНИЗМЫ
На рис.2.7 представлены наиболее часто применяемые схемы плоских кулачковых механизмов. Входным (ведущим) звеном является вращающийся кулачок 1. Ведомое звено называется толкателем 3. Для уменьшения потерь на трение в конструкциях кулачковых механизмов часто предусматривают
ролик 2, образующий вращательную пару с толкателем.
В названии кулачкового механизма указывается вид движения толкателя и вид его рабочей поверхности.
На рис.2.7, а представлена схема кулачкового механизма с поступательным роликовым толкателем. В этом механизме ось вращения кулачка и линия перемещения центра ролика в общем случае смещены относительно друг друга. Расстояние емежду ними называется эксцентриситетом. В частном случае, когда е= 0, механизм называют центральным кулачковым механизмом с поступательным роликовым толкателем.
Механизм на рис.2.7, б называется кулачковым механизмом с качающимся роликовым толкателем.
На рисунках 27, в и 2.7, г представлены механизмы с плоским толкателем: кулачковый механизм с поступательным плоским толкателем и механизм с качающимся плоским толкателем.
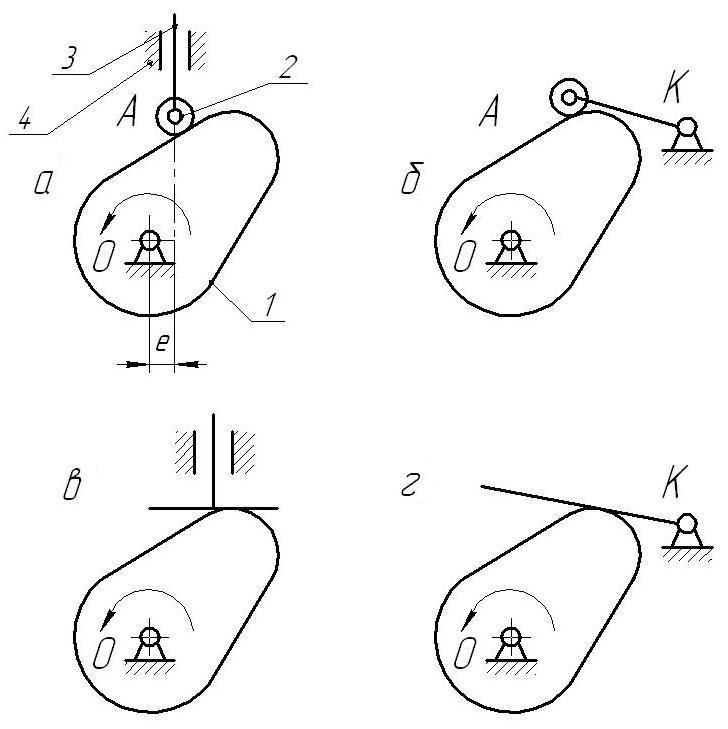
Рис.2.7
 ФРИКЦИОННЫЕ МЕХАНИЗМЫ
ФРИКЦИОННЫЕ МЕХАНИЗМЫ
В этих механизмах движение от входного звена к выходному передаётся за счёт сил трения, возникающих в результате контакта этих звеньев.
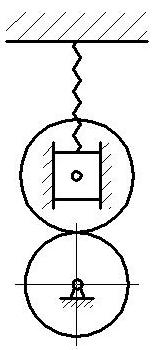
Простейшая фрикционная передача показана на рис.2.8. Она состоит из двух цилиндрических катков и стойки. Один каток прижимается к другому силой упругости пружины.
Рис.2.8
ЗУБЧАТЫЕ МЕХАНИЗМЫ
В технике различают трёхзвенные зубчатые передачи, многоступенчатые передачи и планетарные передачи. Трёхзвенная передача состоит из двух зубчатых колёс и стойки.
Передача, в которой угловая скорость ведомого звена меньше, чем угловая скорость ведущего звена, называется понижающей передачей (редуктор). Если в зубчатой передаче происходит увеличение угловой скорости ведомого звена, передача называется повышающей (мультипликатор).
На рис.2.9 приводятся условные изображения трёхзвенной цилиндрической зубчатой передачи внешнего зацепления (рис.2.9, а), цилиндрической передачи внутреннего зацепления (рис.2.9, б) и реечной зубчатой передачи (рис.2.9,в ).
На условных изображениях плоских и пространственных зубчатых пар колёса на виде с торца изображают штрихпунктирными линиями. Зубья изображают только на зубчатой рейке. На виде сбоку зубчатые колёса изображают сплошными линиями.
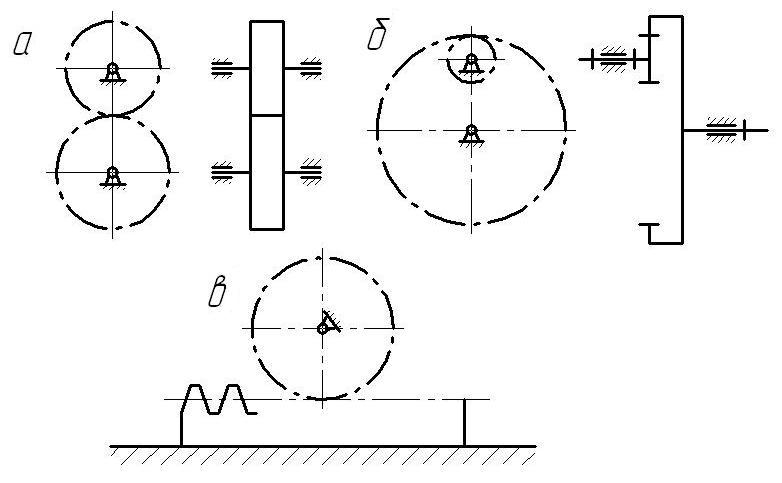
Рис.2.9
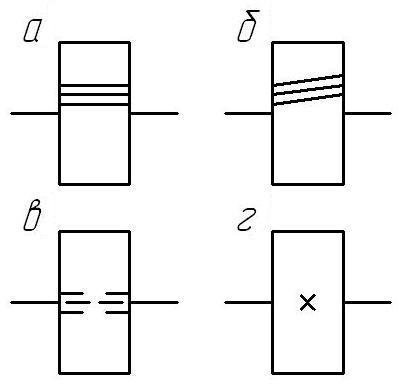
В некоторых случаях на кинематической схеме требуется различать прямозубые и косозубые колёса. Соответствующие условные обозначения представлены на рис.2.10, а и 2.10, б.
Для различения колёс, вращающихся на оси и закреплённых на валу, применяют условные обозначения колёс по рис.2.10, в и 2.10, г.
Рис. 2.10
На рис.2.11 показано в двух проекциях условное изображение конической зубчатой передачи, которая передаёт вращение между пересекающимися осями.
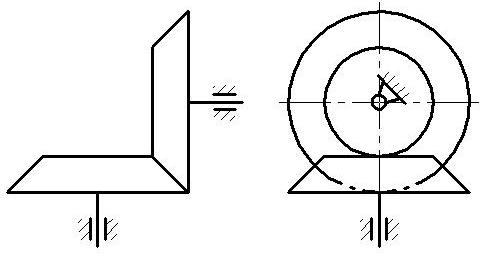
Рис.2.11
На рис.2.12 приводятся условные изображения червячной передачи с цилиндрическим червяком (рис.2.12, а) и винтовой зубчатой передачи (рис.2.12,б).
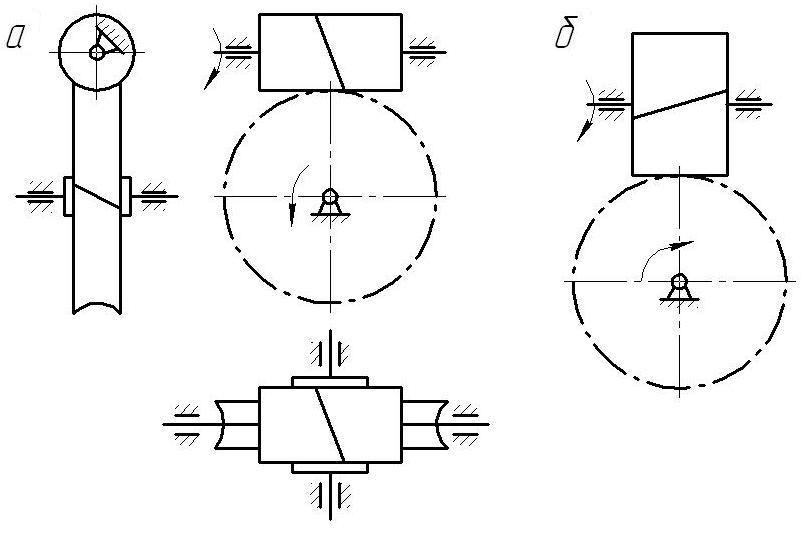
Рис.2.12
Оси колёс в этих передачах перекрещиваются. Червячная передача применяется для передачи вращения от червяка к червячному колесу в качестве понижающей передачи. При зацеплении зубья червяка и колеса находятся в линейном контакте. Винтовая зубчатая передача состоит из двух косозубых (винтовых) колёс. Ввиду того, что зубья в винтовой передаче касаются в точке, её нагрузочная способность ниже, чем нагрузочная способность червячной передачи.
На кинематических схемах червячных и винтовых передач должно быть задано направление винтовой линии червяка в червячной передаче и направление винтовой линии одного из зубчатых колёс винтовой зубчатой передачи. Различают правые и левые винтовые линии.
Для определения направления винтовой линии следует мысленно перемещаться по образующей цилиндрической заготовке червяка или косозубого колеса, начиная движение от любого из двух его торцов, до встречи с винтовой линией и, рассматривая винтовую линию как препятствие, продолжать движение по винтовой линии. Если при этом потребуется повернуть направо, винтовая линия называется правой, при повороте налево-левой винтовой линией. На кинематических схемах по рис.2.12 червяк и косозубое колесо винтовой передачи представляют собой соответственно правый червяк и левое косозубое колесо.
На рис.2.13 представлены условные изображения двух наиболее часто применяемых планетарных механизмов: плоской планетарной передачи (рис.2.13, а) и конической планетарной передачи (рис.2.13, б). Планетарными называются механизмы, которые имеют зубчатые колёса, оси которых вращаются в пространстве. Планетарные механизмы с одной степенью свободы (с одним двигателем) называются планетарными передачами.
Зубчатые колеса а и в планетарных передач называются центральными. Колесо в в рассматриваемых схемах представляет собой неподвижное колесо. Колесо с с подвижной осью вращения называется планетарным (сателлит). Звено h называется водило.
В планетарных механизмах, представленных на рис.2.13, передача движения возможна от колеса а к водилу h и наоборот.
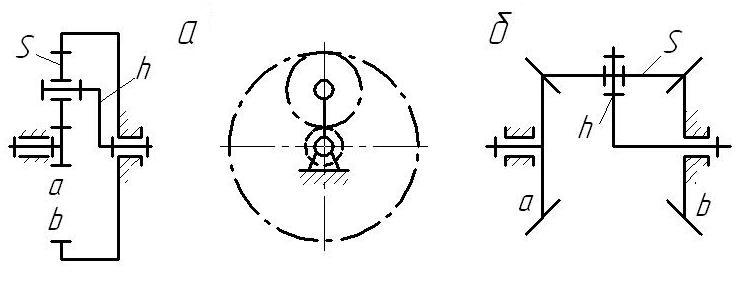
Рис.2.13
ВИНТОВЫЕ МЕХАНИЗМЫ
Простейший винтовой механизм (рис.2.14) состоит из винта 1, гайки 2 и стойки 3. Гайка является одновременно ползуном, который перемещается поступательно в неподвижных направляющих. Этот механизм называют также передачей ''винт-гайка''.
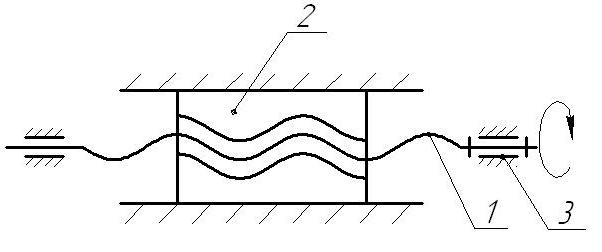
Рис.2.14
Дата добавления: 2016-01-26; просмотров: 1512;