Объекты управления и их свойства
Типовые технологические процессы (ТП) пищевой
Промышленности - как объекты автоматизации
ТП пищевых производств отличаются сложностью и многообразием. Однако в большинстве случаев их можно представить в виде ряда типовых процессов – объектов управления.
В этой связи различают:
- механические процессы, основными показателями которых являются: перемещение, транспортирование, взвешивание, дозирование, измельчение, смешивание, сортировка;
- гидродинамические процессы – перемешивание жидкостей, разделение газовых и жидких неоднородных смесей, перемешивание материалов и др.;
- тепло- и массообменные процессы без изменения агрегатного состояния веществ – сжатие, разрежение, нагревание газом или паром, охлаждение, кондиционирование, вентиляция;
- тепло- и массообменные процессы с изменением агрегатного состояния вещества (диффузионные процессы) – разделение газовых смесей, выпаривание, конденсация, ректификация, сушка;
- химические процессы – окисление, восстановление, образование гидроокисей, нейтрализация, ароматизация, гидролиз сахаров, перегонка, гидрогенизация, фильтрация.
- микробиологические процессы – приготовление и хранение питательных сред, брожение, стерилизация, пастеризация, фиксация, выпарка, перегонка, дозирование.
Необходимость управления ТП обусловлена наличием различных возмущений (изменение температуры, неравномерность скорости подачи исходного сырья, неоднородность сырья и так далее). Если бы ТП можно было изолировать от возмущений, то отпала бы необходимость в системе управления.
Для типовых процессов – как объектов управления – могут быть разработаны типовые схемы автоматизации управления – автоматические системы управления технологическим процессом (АСУТП).
Параметры и характеристики объектов управления
Каждый объект управления (ОУ) можно охарактеризовать одним или несколькими количественными и качественными параметрами. Такие величины, как производительность, мощность, расход, влажность продукта, скорость и т.д. изменяются в широких пределах. Законы этих изменений во времени произвольны и носят случайный характер. Однако можно выделить ряд величин, которые присущи любому объекту автоматического управления.
Емкость объекта
Механические объекты, например резервуар, обладают способностью накапливать в себе жидкость, газ, сыпучие тела. Понятие емкости здесь связано с объемом резервуара. Печь, термостат, сушильный шкаф способны накапливать тепло. Понятие их емкости связано с теплоемкостью и т. д.
В общем виде уравнение динамики ОУ для малого отрезка времени (когда зависимость между входными и выходными параметрами можно считать линейной) можно записать
dy/dt = К dE/dt
где dy/dt - скорость изменения регулируемого параметра; К - постоянная объекта, называемая емкостью ОУ, характеризующая его способность запасать энергию; Е = E1 – Е2= - подводимая к объекту энергия.
Если dE > 0, то в объекте накапливается энергия, что сопровождается увеличением регулируемого параметра у. При dE < 0, запас энергии в объекте снижается, т. е. регулируемый параметр уменьшается.
Для многих объектов величины подводимой и затрачиваемой энергии в той или иной степени зависят от значения регулируемого параметра.
Условие E1 = E2 соответствует состоянию равновесия объекта. При отклонении регулируемого параметра у от заданного у* в ту или иную сторону равновесие ОУ нарушается.
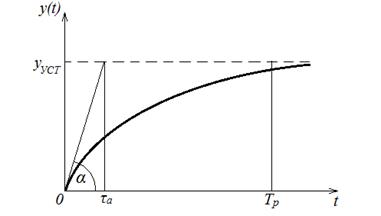
Время разгона
Время разгона - это время, в течение которого регулируемый параметр у изменяется от нуля до номинального значения уУСТ при максимальном возмущении или управлении при условии, что скорость изменения dy/dt остается в течение этого времени постоянной, рис. 15.1. Время разгона TР может быть определено экспериментально по переходной характеристике y(t) как
Tр=τа / k, где τа – постоянная времени объекта; k - тангенс угла α наклона касательной в начальной точке t = 0.
|
| Рис.15.1 – Переходная характеристика ОУ |
Чувствительность объекта
Чувствительность, или скорость разгона, объекта представляет величину, обратную времени разгона ε = 1/TР.
Постоянная времени объекта τа представляет собой время, в течение которого регулируемый параметр достигает нового установившегося значения при неизменных притоке и расходе вещества или энергии для данного объекта, лишенного самовыравнивания. Значение времени разгона практически принимают равным ТР = (3…4) τа.
Дата добавления: 2016-01-18; просмотров: 1390;