Дополнительные модули МК
Описанные выше модули составляют так называемый базовый комплект МК и входят в состав любого современного контроллера. Очевидна необходимость включения в состав МК дополнительных модулей, состав и возможности которых определяются конкретной решаемой задачей. Среди таких дополнительных модулей следует, прежде всего, отметить:
• модули последовательного ввода/вывода данных;
• модули аналогового ввода/вывода.
4.10.1. Модули последовательного ввода/вывода
Наличие в составе 8-разрядного МК модуля контроллера последовательного ввода/вывода стало в последнее время обычным явлением. Задачи, которые решаются средствами модуля контроллера последовательного ввода/вывода, можно разделить на три основные группы:
• связь встроенной микроконтроллерной системы с системой управления верхнего уровня, например, с персональным компьютером. Чаще всего для этой цели используются интерфейсы RS-232C и RS-485;
• связь с внешними по отношению к МК периферийными ИС, а также с датчиками физических величин с последовательным выходом. Для этих целей используются интерфейсы I2C, SPI, а также нестандартные протоколы обмена;
• интерфейс связи с локальной сетью в мультимикроконтроллерных системах. В системах с числом МК до пяти обычно используются сети на основе интерфейсов I2C, RS-232C и RS-485 с собственными сетевыми протоколами высокого уровня. В более сложных системах все более популярным становится протокол CAN.
С точки зрения организации обмена информацией упомянутые типы интерфейсов последовательной связи отличаются режимом передачи данных (синхронный или асинхронный), форматом кадра (число бит в посылке при передаче байта полезной информации) и временными диаграммами сигналов на линиях (уровни сигналов и положение фронтов при переключениях).
Число линий, по которым происходит передача в последовательном коде, обычно равно двум (I2C, RS-232C, RS-485) или трем (SPI, некоторые нестандартные протоколы). Данное обстоятельство позволяет спроектировать модули контроллеров последовательного обмена таким образом, чтобы с их помощью на аппаратном уровне можно было реализовать несколько типов последовательных интерфейсов. При этом режим передачи (синхронный или асинхронный) и формат кадра поддерживаются на уровне логических сигналов, а реальные физические уровни сигналов для каждого интерфейса получают с помощью специальных ИС, которые называют приемопередатчиками, конверторами, трансиверами.
Среди различных типов встроенных контроллеров последовательного обмена, которые входят в состав тех или иных 8-разрядных МК, сложился стандарт «де-факто» — модуль UART (Universal Asynchronous Receiver and Transmitter). UART — это универсальный асинхронный приемопередатчик. Однако большинство модулей UART, кроме асинхронного режима обмена, способны также реализовать режим синхронной передачи данных.
Не все производители МК используют термин UART для обозначения типа модуля контроллера последовательного обмена. Так, в МК фирмы Motorola модуль асинхронной приемопередачи, который поддерживает те же режимы асинхронного обмена, что и UART, принято называть SCI (Serial Communication Interface). Следует отметить, что модуль типа SCI обычно реализует только режим асинхронного обмена, то есть его функциональные возможности уже по сравнению с модулями типа UART. Однако бывают и исключения: под тем же именем SCI в МК МС68НС705В16 скрывается модуль синхронно-асинхронной передачи данных.
Модули типа UART в асинхронном режиме работы позволяют реализовать протокол обмена для интерфейсов RS-232C, RS-422A, RS-485, в синхронном режиме — нестандартные синхронные протоколы обмена, и в некоторых моделях — SPI. В МК фирмы Motorola традиционно предусмотрены два модуля последовательного обмена: модуль SCI с возможностью реализации только протоколов асинхронной приемопередачи для интерфейсов RS-232C, RS-422A, RS-485 и модуль контроллера синхронного интерфейса в стандарте SPI.
Протоколы интерфейсов локальных сетей на основе МК (I2C и CAN) отличает более сложная логика работы. Поэтому контроллеры CAN интерфейса всегда выполняются в виде самостоятельного модуля. Интерфейс I2C с возможностью работы как в ведущем, так и ведомом режиме, также обычно поддерживается специальным модулем (модуль последовательного порта в МК 89С52 фирмы Philips). Но если реализуется только ведомый режим I2C, то в МК PIC16 фирмы Microchip он успешно сочетается с SPI: настройка одного и того же модуля на один из протоколов осуществляется путем инициализации.
В последнее время появилось большое количество МК со встроенными модулями контроллеров CAN и модулями универсального последовательного интерфейса периферийных устройств USB (Universal Serial Bus). Каждый из этих интерфейсов имеет достаточно сложные протоколы обмена, для ознакомления с которыми следует обращаться к специальной литературе.
4.10.2. Модули аналогового ввода/вывода
Необходимость приема и формирования аналоговых сигналов требует наличия в МК модулей аналогового ввода/вывода.
Простейшим устройством аналогового ввода в МК является встроенный компаратор напряжения. Компаратор сравнивает входное аналоговое напряжение с опорным потенциалом VREF и устанавливает на выходе логическую «1», если входное напряжение больше опорного. Компараторы удобнее всего использовать для контроля определенного значения входного напряжения, например, в термостатах. В комбинации с внешним генератором линейно изменяющегося напряжения встроенный компаратор позволяет реализовать на МК интегрирующий аналого-цифровой преобразователь (АЦП).
Однако более широкие возможности для работы с аналоговыми сигналами дает АЦП, встроенный в МК. Чаще всего он реализуется в виде модуля многоканального АЦП, предназначенного для ввода в МК аналоговых сигналов с датчиков физических величин и преобразования этих сигналов в двоичный код. Структурная схема типового модуля АЦП представлена на рис. 4.12.
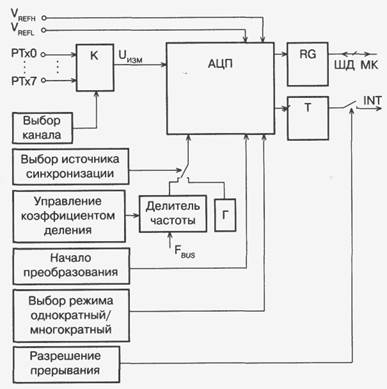
Рис. 4.12. Структура модуля АЦП.
Многоканальный аналоговый коммутатор К служит для подключения одного из источников аналоговых сигналов (РТх0...РТх7) ко входу АЦП. Выбор источника сигнала для преобразования осуществляется посредством записи номера канала коммутатора в соответствующие разряды регистра управления АЦП.
Два вывода модуля АЦП используются для задания опорного напряжения Uoп: VREFH — верхний предел Uoп, VREFL — нижний предел. Разность потенциалов на входах VREFH и VREFL и составляет Uoп. Разрешающая способность АЦП составляет Uoп/2n, где n — число двоичных разрядов в слове результата. Максимальное значение опорного напряжения, как правило, равно напряжению питания МК. Если измеряемое напряжение UИ3M > VREFH, то результат преобразования будет равен FF, код 00 соответствует напряжениям UИЗМ J VREFL. Для достижения максимальной точности измерения следует выбрать максимально допустимое значение Uоп. В этом случае напряжение смещения нуля входного буфера и нелинейность передаточной характеристики АЦП будут вносить относительно малые погрешности.
Собственно аналого-цифровой преобразователь выполнен по методу последовательного приближения. Практически во всех моделях 8-разрядных МК разрядность АЦП также составляет 8 разрядов. Соответственно, формат представления результатов измерения АЦП — однобайтовый. Исключение составляют лишь модули АЦП микроконтроллеров для управления преобразователями частоты для электроприводов, разрешающая способность которых равна 10 разрядам. Два младших разряда результата получают с помощью дополнительного емкостного делителя, не связанного с регистром последовательного приближения.
Длительность такта преобразования задает генератор синхронизации: один цикл равен двум периодам частоты генератора tADC. Время преобразования для типовых модулей АЦП микроконтроллеров составляет от единиц до десятков микросекунд.
Источником синхронизации модуля АЦП может служить встроенный RC-генератор (Г) или импульсная последовательность тактирования межмодульных магистралей МК. В первом случае частота синхронизации АЦП обязательно окажется оптимальной, то есть той, которая рекомендуется в техническом описании. Во втором случае выбранная по другим соображениям fBUS может оказаться неподходящей для модуля АЦП. На этот случай в составе некоторых модулей предусмотрен программируемый делитель частоты fBUS.
Момент завершения каждого цикла преобразования отмечается установкой триггера готовности данных. Если прерывания от модуля АЦП разрешены, то генерируется запрос на прерывания. Как правило, чтение регистра результата сбрасывает триггер готовности.
Большинство модулей АЦП имеют только режим программного запуска: установка одного из битов регистра режима запускает очередное измерение. Наиболее универсальные модули АЦП имеют также режим автоматического запуска, при котором после завершения одного цикла преобразования немедленно начинается следующий. Однако данные измерения каждого цикла должны быть считаны программным способом.
Цифро-аналоговые преобразователи в составе МК являются большой редкостью. Функция цифро-аналогового преобразователя реализуется средствами модуля программируемого таймера в режиме ШИМ. На одном из выводов МК формируется высокочастотная импульсная последовательность с регулируемой длительностью импульса. Полученный сигнал сглаживается фильтром нижних частот на операционном усилителе. Разрешающая способность такого ЦАП определяется дискретностью регулирования коэффициента заполнения в режиме ШИМ.
Дата добавления: 2016-01-07; просмотров: 1112;