Потери энергии в переходных процессах
В переходных режимах протекающие по обмоткам двигателя токи существенно превышают номинальные значения и вызывают повышенные потери энергии, т.е. дополнительный нагрев двигателя. Особенно большое значение определения потерь электроэнергии в переходных процессах имеет для электроприводов, у которых динамический режим является основным или занимает заметное время в течение цикла (электропривода прокатных станов, подъёмных кранов, шахтных подъёмных машин). Потери энергии за время переходного процесса
 .
.
где S – относительный перепад скорости.
Определим потери энергии при пуске, реверсе и торможении двигателей. При пуске двигателей вхолостую ( 
 ) потери энергии равны запасу кинетической энергии, которая будет
) потери энергии равны запасу кинетической энергии, которая будет
запасена к концу пуска в движущихся частях электропривода
 .
.

При динамическом торможении (sнач=0 , sкон= 1) весь запас кинетической энергии превращается в потери энергии, выделяемые в двигателе в виде тепла  .
.
При противовключении (sнач=2 , sкон=1) потери энергии равны тройному запасу кинетической энергии электропривода
 .
.
потери энергии при реверсе (sнач=2, sкон=0) равны сумме потерь при торможении противовключением и пуске
 .
.
Существует два основных способа снижения потерь электроэнергии в переходных процессах:
· уменьшение момента инерции электропривода;
· регулирование скорости холостого хода в переходных процессах.
Уменьшить момент инерции привода можно следующими способами:
· применением малоинерционных электродвигателей, имеющих пониженный момент инерции якоря или ротора (увеличена длина якоря и уменьшен диаметр);
· рациональным конструированием механической передачи (выбором оптимального передаточного числа редуктора, рациональных размеров и форм элементов механической передачи и конструкционных материалов);
· заменой одного двигателя двумя, имеющими половинную мощность заменяемого двигателя (суммарный момент инерции меньше момента инерции одного двигателя на полную мощность). Например, два двигателя типа 4АН200 мощностью по 45 кВт имеют суммарный момент инерции 2x1,38=2,76 кг·м2. Двигатель 4АН250 мощностью 90 кВт на туже скорость имеет момент инерции 3,53 кг·м2, что почти на 30% больше.
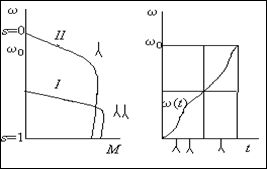
Наиболее эффективным средством снижения потерь является реализация управляемых переходных процессов. Рассмотрим самый простой способ управления пуском, когда скорость идеального холостого хода задается в два этапа. Такой пуск возможен при использовании двухскоростного АД.
Потери энергии в роторе АД при прямом пуске на характеристику II с учетом sнач=1, sкон=0
 .
.
Потери энергии при ступенчатом пуске при разгоне по характеристике I (первая ступень пуска) с учетом sнач=1, sкон=0, 
 .
.
Потери энергии при разгоне по характеристике II (вторая ступень пуска) с учетом sнач=0,5, sкон=0
 .
.
Суммарные потери при двухступенчатом пуске
 .
.
Потери сократились вдвое по сравнению с пуском в одну ступень. Кроме того, снижение потерь энергии в роторе вызывает снижение потерь в статоре АД. Если скорость идеального холостого хода в переходном процессе имеет n ступеней регулирования, потери энергии в роторе уменьшаются в n раз
 ,
,
где wо - максимальная скорость идеального холостого хода, соответствующая последней ступени.
При плавном задании скорости идеального холостого хода потери снижаются в 2Tм/tпп раз. Чем медленнее разгон, тем меньше момент, потери мощности, суммарные потери за время пуска. Однако это справедливо при отсутствии потерь, связанных с наличием статической нагрузки, которые увеличиваются с ростом времени пуска.
Дата добавления: 2016-01-07; просмотров: 3697;