Наблюдение за ВС-нарушителями в БСПС.
В основу работы БСПС положена функция наблюдения за ВС, находящимися в достаточно близком воздушном пространстве. Функция наблюдения позволяет воздушному судну, оснащённому БСПС, запрашивать приёмоответчики режимов ATCRBS (А/С) и «S» тех ВС, которые находятся в зоне действия системы. Собственный приёмоответчик отвечает на аналогичные запросы других ВС, оснащённых БСПС. Задача состоит в определении взаимного расположения всех ВС - участников воздушного движения, слежении за их перемещением для нормирования траекторий и прогнозировании опасного сближения. Так, система TCAS II должна одновременно отслеживать до 30 ВС TCAS 2000 до 50) при номинальной дальности действия 26 км для приёмоответчиков режима ATCRBS и 56 км для приёмоответчиков режима «S». Система TCAS II обеспечивает надёжное наблюдение за ЗС, имеющими высокую скорость сближения порядка 2230 км/ч при максимальной плотности воздушного движения вплоть до 0,087 ВС на квадратный километр. Если на любом удалении вплоть до 26 км общее число ВС превысит 30, то наиболее удалённые ВС с более низкими скоростями движения исключаются без ущерба надёжности наблюдения и сопровождения. Ни одно ВС, находящееся далее 26 км, не должно квалифицироваться как ВС-нарушитель и вызывать выработку рекомендаций уклонения от столкновения.
Система TCAS II передаёт серию запросных сигналов как в режиме ATCRBS (С), так и в режиме «S», осуществляя круговой обзор пространства с номинальной частотой один раз в секунду. Запросы передаются при номинальном уровне эффективной излучаемой мощности 54±2 дБ мВт, измеренном при угле возвышения 0° относительно продольной оси ВС. Принимая ответные сигналы, система TCAS II вычисляет удаление каждого ВС-нарушителя по задержке ответа относительно запроса с погрешностью дискретности 15 м, их пеленги относительно продольной оси своего ВС с погрешностью 7... 10 и высотное разделение с каждым ВС-нарушителем с дискретностью 30 м, если принимается информация об их высоте. Поскольку в режимах ATCRBS (С) и «S» всегда передаются отсчёты барометрической высоты по стандартному давлению 1013,25 гПа, система TCAS II оценивает взаимное расположение ВС независимо от установки их экипажами уровня давления в барометрических высотомерах.
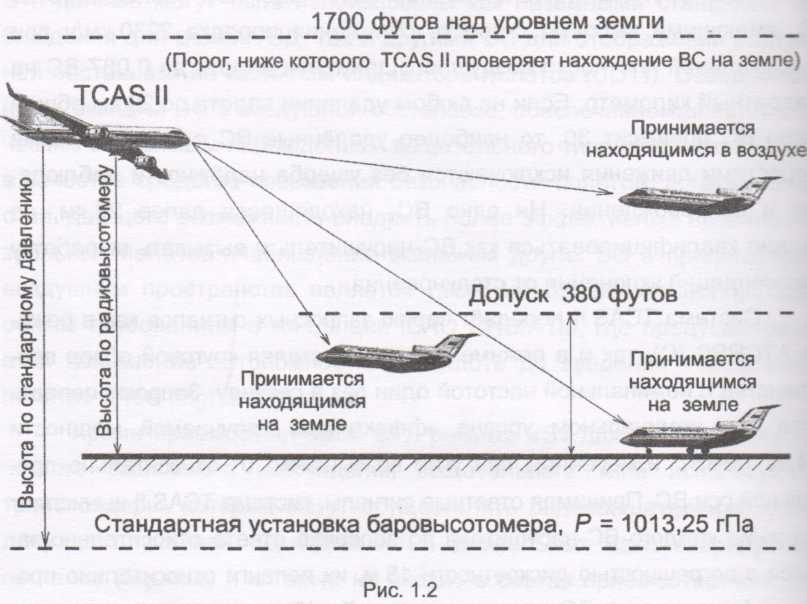
При значении высоты менее 1700 ft относительно поверхности земли логическая программа системы TCAS II вычисляет высоту ВС- нарушителя над уровнем земли, используя для этой цели данные о барометрической высоте собственного ВС, показания своего радиовысотомера и полученные данные о барометрической высоте ВС- нарушителя. И если эта высота менее 150 м (380 ft), система TCAS II квалифицирует данное ВС как находящееся на земле и поэтому не вырабатывает никаких предупреждений ТА и рекомендаций RA для экипажа своего ВС (рис. 1.2).
|
13.1. Наблюдение за ВС-нарушителями с приёмоответчиками режимов ATCRBS (А/С).
Этот вариант наблюдения является проблемным ввиду низкой помехозащищённости системы ATCRBS (А/С). Для запроса приёмоответчиков : режимом ATCRBS (А/С) аппаратура TCAS II использует межрежимные модифицированные запросы в режиме «С». Указанный вариант запроса известен как «общий вызов в режиме «С». При этом система TCAS II не использует информацию о коде ВС (Squawk), поскольку она не передает запросы в режиме «А». На такие запросы ответчики режима «S» не отвечают, что уменьшает наложение и взаимное подавление ответных каналов - так называемые синхронные помехи. Количество помех такого рода уменьшается также путём использования верхней и нижней надавленных антенн, работающих в режиме кругового обзора с периодом в одну секунду. Для обеспечения зоны обзора в 360° необходимо, чтобы -отправленные передачи происходили с небольшим перекрытием.
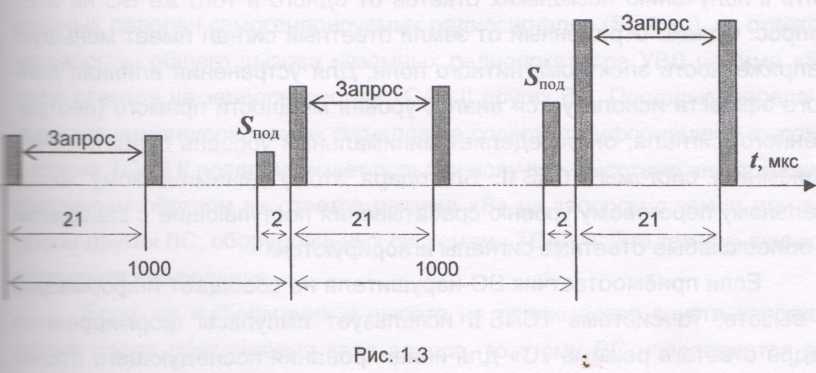
Кроме того, в системе TCAS II применена уникальная методика запроса называемая «шёпот - крик». Цель этого метода - разделить ВС, находящиеся в зоне действия системы, не только по направлениям, но и по диапазонам дальности, чтобы на каждый запрос отвечало уменьшенное количество ВС. Согласно этой методике система TCAS II излучает последовательность парных запросных сигналов с нарастающим уровнем мощности (рис. 1.3).
|
Первый запрос передаётся при относительно меньшем уровне мощности, и на него отвечают приёмоответчики близлетящих ВС. Каждый последующий запрос излучается с большей мощностью, и на неге ответят более удалённые ВС. Но этот запрос предваряется передачей дополнительного импульса Snoft с уровнем мощности, несколько меньшим уровня предыдущего запроса. Этот импульс вызывает срабатывание схем подавления боковых лепестков приёмоответчиков [1], и ответ- ближе расположенных уже ответивших ВС становятся невозможными Всего используется 24-уровневая последовательность запросов.
Кроме синхронных наложений в системе TCAS II вероятно появление несинхронных помех и помех, вызванных многолучевым распространением радиоволн. В частности, несинхронные помехи появляются в результате приёма ответов приёмоответчиков, передаваемых на запросы наземных вторичных радиолокаторов режимов ATCRBS и систем TCAS II других близколетящих ВС. Эти сигналы не являются ответами на запрос нашей системы TCAS II и затрудняют измерение дальности Однако при использовании современных алгоритмов построения и сглаживания траекторий вероятность того, что на основе этих «ложных ответов» возникнет и будет продолжаться отслеживание таких ВС чрезвычайно мала, хотя и не равна нулю.
Эффект многолучевого распространения возникает в результат отражения сигнала запроса от поверхности земли, что могло бы приводить к получению нескольких ответов от одного и того же ВС на это запрос. Однако отражённый от земли ответный сигнал имеет меньшую напряжённость электромагнитного поля. Для устранения влияния данного эффекта используется анализ уровня мощности прямого (неотражённого) сигнала; он определяет минимальный уровень срабатывания приёмника системы TCAS II. Благодаря этому динамическому минимальному пороговому уровню срабатывания поступающие с задержкой и более слабые ответные сигналы игнорируются.
Если приёмоответчик ВС-нарушителя не сообщает информации; о высоте, то система TCAS II использует импульсы формирования кадра ответа в режиме «С» для инициирования последующего отслеживания ВС-нарушителя на основе данных только об удалении и пеленге [1]. Высота такого ВС-нарушителя условно считается равной высоте собственного ВС исходя из логики расчёта на наихудший случай. Эти данные используются в последующем логической программой оценки степени угрозы столкновения, но вырабатываются только предупреждающие сообщения об опасности без рекомендаций по уходу от столкновения.
1.3.2. Наблюдение за ВС-нарушителями с приёмоответчюсами
режима «S». Гибридное наблюдение.
Наблюдение системой TCAS II ВС, оснащённых приёмоответчиками с режимом «S», основано на возможности этих устройств обеспечивать избирательную адресацию. Многие виды помех и искажений, свойственных режиму ATCRBS (С), в данном случае отсутствуют. Но, тем не менее, необходимо учитывать переотражения радиоволн от земли и осуществлять наблюдение при минимально возможном числе запросов с целью уменьшения радиопомех. Применение установленной сверху антенны повышает невосприимчивость системы TCAS II к переотражениям.
В целом наблюдение системой TCAS II ВС, оснащённых приёмоответчиками с режимом «S», предполагает следующие три вида наблюдения - пассивное, активное и гибридное.
Оборудование системы TCAS II рассчитано на обеспечение наблюдения в режиме «S» при минимальном числе запросов. Для этого обнаружение ВС начинается с пассивного приёма и контроля их ежесекундных передач самогенерируемых радиосигналов (Squitter), их ответов -а запросы общего вызова наземных радиолокаторов УВД режима «S» либо ответов на запросы систем TCAS II других ВС. Поскольку передача коротких самогенерируемых сигналов не содержит информации о высоте, система TCAS II предпринимает попытки получить высотную информацию пассивным образом из ответов режима «S» на запросы с земли или запросы других ВС, оборудованных системами TCAS II. Это так называемое пассивное наблюдение.
Если же информация о высоте не принимается спустя короткое время после обнаружения кода адреса, то этому ВС направляется активный запрос для получения данных о его высоте. После того как система TCAS II получит информацию о высоте обнаруженного ВС, она сравнивает её с высотой своего ВС (высоты всегда отсчитаны по стандартному давлению 1013,25 гПа). Сравнение производится для определения того, можно ли не учитывать это ВС как потенциально угрожающее или его необходимо запросить для проверки дальности и изменения дальности. Если измеренная дальность и оценённое изменение дальности уже представляет или вскоре представит угрозу столкновения, это ВС-нарушитель необходимо активно запрашивать с темпом один раз в секунду. При этом соответствующие данные о его траектории вводятся в алгоритмы предупреждения столкновения. ВС, находящееся на большем удалении, должно запрашиваться реже - с такой регулярностью, которая необходима лишь для построения траектории. При этом частота запросов сразу же увеличивается до одного раза в секунду, когда обнаруженное ВС станет представлять потенциальную угрозу столкновения.
Применение пассивного обнаружения в сочетании со сравнением высот и менее частыми запросами не представляющих непосредственную угрозу ВС автоматически уменьшает частоту запросных посыл с- когда плотность других ВС весьма высока, и тем самым уменьшает общий уровень взаимных радиопомех. Такой режим наблюдения называется гибридным.
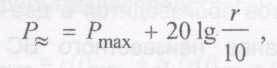
Существует ещё один приём, повышающий надёжность наблюдения и улучшающий помехоустойчивость системы TCAS II путём ограничения электромагнитных помех в используемой полосе част:- 1030/1090 МГц. При высокой интенсивности воздушного движем, в нижнем воздушном пространстве для ВС, по которым не прогнозируется угроза столкновения по крайней мере в течение не менее 6С : и которые находятся далее 6 км от собственного ВС, система TCAS I автоматически уменьшает регулярность передачи запросных сигнале s в режиме «S» до одного раза в 5 с. Кроме того, система TCAS II может подсчитывать количество ВС, оборудованных системами TCAS в пределах своей зоны действия, используя для этой цели передаваемые в среднем каждые 8 с самогенерируемые широковещательные посылки-сообщения о наличии у себя системы TCAS II, в которых содержится код адреса режима «S» отправителя. Оборудование системы TCAS II обеспечивает обработку, по крайней мере, 150 адресов режима «S». Когда число ВС с системами TCAS возрастает, количество и мощность запросных сигналов уменьшается. Кроме того, уровень мощности передачи запросов слежения режима «S» автоматически уменьшается для ВС, находящихся в пределах 18,5 км:
(1.1)
где Р* - регулируемый уровень мощности;
Рмах ~ максимальный уровень мощности излучения (обычно 250 Вт) для ВС, удалённых на 18,5 км и более;
г— прогнозируемая дальность ВС.
В дальнейшем после внедрения 4-го и 5-го уровней вторичной радиолокации режима «S», при которых приёмоответчики (транспондеры) окружающих ВС смогут излучать сигналы более длительных самогенерируемых посылок (Squitter) из 112 бит, содержащих информацию о местоположении этих ВС, роль пассивного наблюдения возрастёт. Взаимное расположение ВС для отслеживания траекторий и оценки степени .угрозы столкновения можно будет анализировать из сравнения положения своего ВС и координатной информации ВС-нарушителей, полученной из самогенерируемых посылок их транспондеров. Тем не менее, БСПС должна будет подтверждать данные о взаимном расположении ВС, доставленные более длительным самогенерируемым сигналом, путём непосредственного измерения фактической дальности запросным методом и анализа высотного разделения. Такое наблюдение, как было сказало выше, называется гибридным. Первоначальное подтверждение осуществляется при появлении (завязке) пассивной траектории. Переподтверждение производится один раз каждые Юс, если ВС-нарушитель становится непосредственной угрозой с точки зрения дальности и высоты, пассивное наблюдение после подтверждения данных используется для слежения за не представляющими угрозу удалёнными ВС. Таким образом, наряду с пассивным, активное наблюдение используется во всех случаях, когда ВС-нарушитель становится непосредственной угрозой, с тем чтобы сохранить независимость БСПС как самостоятельной системы обеспечения безопасности полётов.
Дата добавления: 2016-01-03; просмотров: 2522;