Математические модели многомерных автоматических систем
8.1Понятие о системах с несколькими регулируемыми параметрами
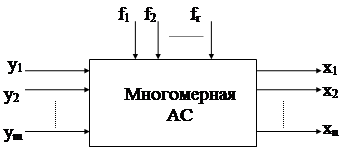
В предыдущих разделах изучались одномерные системы. Они могли иметь сложную структуру, много внутренних контуров, но в них всегда имелась одна выходная регулируемая величина: обычно либо х(t), либо e(t) и одно задающее воздействие у(t) (хотя возмущающих воздействий может быть несколько f1(t),f2(t),...).Однако на практике часто возникает потребность в одновременном регулировании нескольких выходных величин при нескольких входных воздействиях. Так в системах автоматического управления ЛА требуется обеспечивать одновременное управление углами тангажа J, крена g и рыскания y за счет отклонения соответствующих рулевых поверхностей: руля высоты dв, элеронов dэ и руля направления dн.
|
Системы, в которых имеются две и более выходных регулируемых величин и входных задающих воздействий, называются многомерными или многосвязными автоматическими системами (МАС).
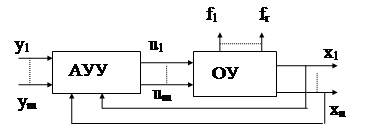
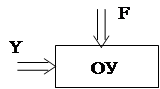
Рассмотрим особенности, которые отличают многомерные системы от одномерных. МАС могут включать в себя один объект управления с несколькими регулирующими органами и несколькими регулируемыми величинами.Например: самолет, авиационный двигатель, генератор и т.п.
|
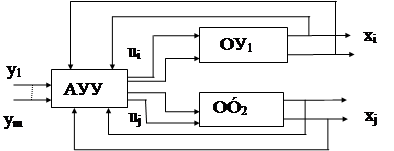
Но могут быть МАС с несколькими объектами управления, объединенными единым управляющим устройством, в котором организуется требуемая взаимосвязь между регулируемыми величинами всех объектов. Например, система электроснабжения ЛА,системы управления строем самолетов и т.д.
|
Взаимосвязи, определяющие многомерность системы, могут быть различными. Их можно разделить на две категории: а) внутренние связи и б) внешние связи. Внутренние связи- это связи, физически существующие между выходными величинами в самом объекте. Математически эти связи заложены в уравнениях динамики объекта. Внешние связи- это связи, организуемые в управляющем устройстве или между управляющими устройствами. Задача внешних связей, создающихся обычно при синтезе АС, может быть двоякой. В одних случаях требуется организовать определенные взаимосвязи между регулируемыми величинами. В других случаях, наоборот, требуется ликвидировать внутренние связи существующие в объекте, то есть обеспечить автономность (независимость) управления по разным координатам.
Так как входные и выходные сигналы МАС состоят из нескольких переменных, то наиболее удобной формой их представления является векторная форма.
 -вектор выходных воздействий;
-вектор выходных воздействий;  - вектор входных воздействий;
- вектор входных воздействий;  - вектор управляющих воздействий.
- вектор управляющих воздействий.
Соответствующие обозначения на структурных схемах следующие:
|

Математический аппарат исследования многомерных АС основан на теории матриц.
8.2Основные правила преобразования матричных уравнений.
Определим основные правила действий над матрицами.
Матрицей называется упорядоченная таблица чисел или функций, положение которых в этой таблице задается номером строки и номером столбца.
 -эта таблица (матрица) характеризуется числовыми характеристиками, к важнейшим из которых относятся:
-эта таблица (матрица) характеризуется числовыми характеристиками, к важнейшим из которых относятся:
1. Размерность матрицы dimA=n ´ m, где n- число строк, m- число столбцов.
2. Определитель матрицы (только при m = n)
 где Aij- алгеброическое дополнение элемента aij, - это определитель, получающийся из исходного путем вычеркивания i-той строки и j- того столбца и умноженного на (-1)i+j
где Aij- алгеброическое дополнение элемента aij, - это определитель, получающийся из исходного путем вычеркивания i-той строки и j- того столбца и умноженного на (-1)i+j
3. Минором к-того порядка Мк матрицы А называется определитель, получающийся на пересечении любых ее к строк и к столбцов.
Главным диагональным минором матрицы А называется определитель, стоящий на пересечении ее к последовательных строк, начиная с первой и к соответствующих столбцов.
4. Ранг матрицы- это порядок наивысшего отличного от нуля миноров этой матрицы .
Например:  , rank A=1, потому что все М2=0 (метод окаймляющих миноров).
, rank A=1, потому что все М2=0 (метод окаймляющих миноров).
Над матрицами можно производить различные операции, к основным из них относятся:
1. Сложение. Суммой двух матриц А и В одинаковой размерности называется такая третья матрица С, каждый элемент которой есть сумма соответствующих элементов матриц А и В:
С=А+ВÛ сij=aij+bij, i=1,...n, j=1,...m
2. Умножение. Произведением двух матриц А и В называется такая матрица С, каждый элемент которой равен сумме произведений элементов строки первой матрицы на соответствующие элементы столбца второй матрицы.

Из этого определения в частности следует, что для того чтобы это произведение существовало необходимо, чтобы число столбцов первой матрицы r совпадало с числом строк второй матрицы. Кроме того, операция умножения матриц некоммутативна, то есть А×В ¹ В×А.
3. Транспонирование
Матрица АТ называется транспонированной по отношению к матрице А, если строки матрицы АТ являются столбцами матрицы А и наоборот.

4. Обращение (только для квадратных матриц)
Матрица А-1 называется обратной по отношению к матрице А, если она удовлетворяет условию
А×А-1 = А-1×А = Е,
где  - единичная матрица.
- единичная матрица.
Операция обращения обычно осуществляется по формуле:
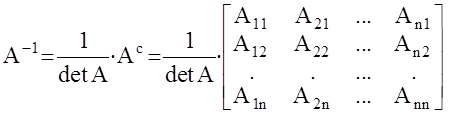 .
.
Ас - союзная или присоединённая матрица, состоящая из алгебраических дополнений элементов транспонированной матрицы А.
Например: 
detA= 4 - 6 = - 2
Проверка: 

5. Умножить матрицу на число, разделить ее на число, продифференцировать или проинтегрировать - это значит проделать соответствующие операции над всеми элементами матрицы.
8.3.Матричная передаточная функция.
Рассмотрим многомерную АС описываемую системой n линейных дифференциальных уравнений с постоянными коэффициентами m входными и n выходными сигналами, приведенную к форме Коши.

Используя аппарат теории матриц данную систему можно записать так:
Данное уравнение получило название уравнение состояния МАС.
Здесь Х =  -вектор, характеризующий состояние многомерной АС, - вектор состояния, его порядок n называется порядком системы;
-вектор, характеризующий состояние многомерной АС, - вектор состояния, его порядок n называется порядком системы;
 - вектор входных воздействий или вектор управления (часто обозначается как вектор U );
- вектор входных воздействий или вектор управления (часто обозначается как вектор U );
 - матрица n´n состояния объекта (динамическая матрица объекта);
- матрица n´n состояния объекта (динамическая матрица объекта);
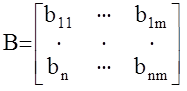 - матрица n´m эффективности управлений.
- матрица n´m эффективности управлений.
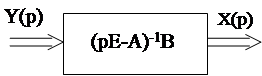
Применим к данному матричному уравнению преобразование Лапласа при нулевых начальных условиях:
рХ(р)=АХ(р)+ВY(р) Û (pE-A)X(р)=BY(р)Þ
W(р)=(pE-A)-1B.
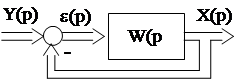
Данное выражение называется матричной передаточной функцией многомерной АС
|
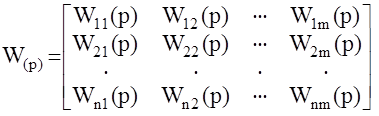
Матричная передаточная функция W(p) представляет собой прямоугольную матрицу размерности n´m. Каждый элемент этой матрицы- есть скалярная передаточная функция от i - того входа yi к j - тому выходу xj
 Матрица (рЕ-А) называется
Матрица (рЕ-А) называется
характеристической матрицей для матрицы состояния А. Ее определитель det(Ep-A) называется характеристическим определителем или
характеристическим полиномом системы. Он определяет собой степенной полином переменной Лапласа р порядка n.
Так как обратную характеристическую матрицу можно записать так:  S(p)- союзная матрица для (рЕ-А).
S(p)- союзная матрица для (рЕ-А).
Это означает, что матричная передаточная функция МАС равна:
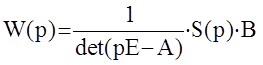
Отсюда следует важнейший вывод, что все скалярные передаточные функции многомерной АС имеют один и тот же характеристический полином. Следовательно, анализ МАС в основном сводится к анализу корней этого полинома.
| <== предыдущая лекция | | | следующая лекция ==> |
| Устойчивость нелинейных АС | | | Анализ многомерных АС. |
Дата добавления: 2015-12-16; просмотров: 1221;