Тема 17. Адаптивные автоматические системы.
17.1.Общие положения.
Адаптивной называется автоматическая система, обеспечивающая наилучший в смысле выбранного критерия качества результат в условиях неполного знания свойств объекта управления и условий окружающей среды.
Обычно это достигается изменением параметров или структурыуправляющего устройства (регулятора) в функции изменяющихся свойств объекта или среды. Отметим, что класс адаптивных оптимальных систем, как и почти все другие классы технических систем, не имеет строгих границ. Практически все обычные системы с обратной связью сохраняют работоспособность при некоторых изменениях параметров управляемого объекта. Однако нецелесообразно так расширять класс адаптивных систем. К этому классу следует относить системы с высокоразвитой способностью приспособления к изменению свойств объекта управления, нуждающиеся в минимальной априорной информации о свойствах объекта и окружающей среды.
Развитию таких адаптивных систем в авиации уделяется большое внимание. Чем же это вызвано?
1) Структура и параметры моделей, используемых для синтеза систем управления, недостаточно полно и точно отображают реальные физические процессы.
2) Параметры принятых математических моделей объекта управления изменяются по заранее неизвестным законам в широких пределах. Например: параметры ПФ маневренного самолета типа МИГ по угловой скорости тангажа wt от отклонения руля высоты db изменяются в следующих пределах
 K=0,07-2,1, T=(0,04-0,17)c, T1=(0,3-3,9)c, z=(0,03-0,15)
K=0,07-2,1, T=(0,04-0,17)c, T1=(0,3-3,9)c, z=(0,03-0,15)
3) Изменяются параметры самого регулятора из-за выхода из строя отдельных элементов, их нелинейности и износа.
Все это приводит к тому, что в оптимальной системе появляются параметрические возмущения, приводящие к отклонению функционала качества от оптимального значения. Если эти отклонения достаточно велики, то необходимо менять принцип управления – переходить к адаптивным системам.
17.2.Классификация адаптивных АС.
В настоящее время не существует единого подхода к точной классификации адаптивных систем управления, однако наиболее употребляемым является следующее подразделения.
1) В зависимости от объема априорной информации:
- самонастраивающиеся системы (СНС);
- самоорганизующиеся системы (СОС).
СНС – это адаптивные системы, в которых настраиваются только параметры регулятора;
СОС – это адаптивные системы, в которых изменяются как параметры, так и структура регулятора.
2) По способу получения информации об управляемом процессе:
- поисковые ( экстремальные) адаптивные системы, предполагающие подачу специальных поисковых сигналов, для настройки регулятора;
- беспоисковые.
3) По целевому назначению:
- адаптивные системы с оптимизацией качества;
- адаптивные системы со стабилизирующей качества.
17.3.Адаптивные системы со стабилизацией и
оптимизацией качества управления.
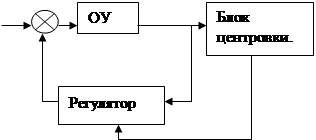
Системы со стабилизацией качества управления предполагают поддержание критерия качества I на заданном (эталонном уровне). Адаптация АС в этом случае обычно осуществляется по результатам сравнения выходных сигналов объекта управления и эталонной модели при воздействии на их вход одинаковых входных сигналов.
|
Входной сигнал Uл подается одновременно на вход объекта управления и эталона. Регулятор должен строиться таким образом, чтобы реакция ОУ и эталона на этот сигнал совпадали.
В случае Х¹ХМ на устройстве сравнения формируется сигнал ошибки Е=Х-ХМ, на основании которого по принятому алгоритму меняются параметры регулятора так, чтобы устранить эту ошибку. Адаптивные системы с оптимизацией качества управления строятся таким образом, чтобы критерий качества I принимал оптимальное значение для каждого режима полета.
Необходимость создания таких систем, особенно для современных ЛА связана, прежде всего с многорежимностью их применения. В этих условиях нельзя говорить об одном эталоне для всех режимов полета, необходимо либо создать целое множество эталонных моделей, либо переходить к системам, оптимизирующим критерий качества по всем режимам.
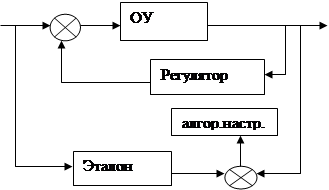
В качестве примера такой системы можно назвать оптимальный фильтр Калмана – Бьюси, матрица усиления которого изменяется в функции изменяющихся характеристик объекта наблюдения и шумов, оставаясь оптимальным для каждого режима с точки зрения минимума выбранного критерия качества  . Функциональную схему такой адаптивной АС можно представить так
. Функциональную схему такой адаптивной АС можно представить так
|
Блок настройки в зависимости от изменяющихся условий полета изменяет параметры регулятора таким образом, чтобы обеспечить оптимум выбранного критерия качества.
Отметим, что в настоящее время применяются оба из рассмотренных принципов построения адаптивных систем. Так при проектировании адаптивных систем ручного управления самолетом, где особенно важно единообразие пилотирования самолетом на всех режимах полета, очевидно предпочтение следует отдать первому подходу с эталоном, отображающим желаемую единую реакцию самолета на управляющие воздействие летчика. При разработке же систем автоматического управления, где важно обеспечить высокое качество управления на всех режимах, более приемлемым является второй подход: адаптивные АС с оптимизацией качества.
17.4.Принцип разделимости. Перспективы развития адаптивных АС.
Рассмотренные выше методы синтеза оптимального управления, оптимальной фильтрации и идентификации решались раздельно. Однако на практике при реализации оптимальных систем управления в текущем времени необходимо одновременное решение этих задач. В этом случае общая задача построения оптимальной системы формируется следующим образом: для объекта 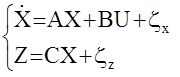
где А, В, Х – необходимі для непосредственного наблюдения,
zx, zz – белые шумы с известными матрицами интенсивностей Q, R
требуется найти оптимальное управление Uопт , как функцию измеряемых величин Z, при котором функционал качества
 или
или

принимают минимальное значение.
В теории оптимального управления доказана очень важная для практики теорема, получившая название "принципа разделимости". Она формируется следующим образом.
Для рассматриваемого объекта управлением, минимизирующим
функционалы качества I , является линейное управление
 ,
,
где Г – матрица оптимальных управлений – решение соответствующих матричных уравнений
 оценки неизвестных матриц
оценки неизвестных матриц
А, В – выходной системы параметрической идентификации;
 - выход оптимального фильтра Калмана – Бьюси
- выход оптимального фильтра Калмана – Бьюси

Р – корреляционная матрица ошибок оценивания, определяемая из решения уравнения

Таким образом, принцип разделимости позволяет рассматривать задачи оптимального управления, фильтрации и идентификации раздельно. Конструировать эти подсистемы независимо друг от друга, а потом объединять их выходы в едином оптимальном управлении. Это существенно упрощает задачу построения адаптивных оптимальных систем.
|

В настоящее время наиболее перспективной структурой адаптивной оптимальной АС считается система, построенная на объединении всего комплекса перечисленных выше алгоритмов.
Системы оценивания и идентификации определяют оценки векторов состояния и управляемого объекта  , на основе которых в системе оптимального управления формируются оптимальные законы Uопт.
, на основе которых в системе оптимального управления формируются оптимальные законы Uопт.
Дата добавления: 2015-12-16; просмотров: 1075;