Общие принципы коррекции динамических свойств СУ
1. Задачи и методы синтеза линейных СУ
Проектирование САУ связано с выбором, обоснованием и определением
- структурной схемы;
- характеристик;
- параметров системы
из условия обеспечения требуемых динамических и эксплуатационных свойств этой системы с учетом возможностей ее технической реализации.
Особенности проектирования:
а) В состав любой САУ входят объект управления и так называемые функционально необходимые элементы. Это – датчики сигналов, вычислительные устройства, усилители, преобразователи сигналов, исполнительные устройства. Функционально необходимые элементы выбираются по каталогам или собираются по типовым схемам на основании требований по мощности, предельным скоростям, ускорениям, допустимым погрешностям.
Характеристики ОУ и функционально необходимых элементов в дальнейшем предполагаются неизменными, а обеспечение требуемых динамических характеристик САУ осуществляется за счет корректирующих устройств, схема и параметры которых определяются в результате их синтеза (или закона управления).
б) При проектировании задаются оптимальными в каком-либо смысле динамическими характеристиками системы, реализация которых и становится основной задачей проектирования. Например, системы, оптимальные по быстродействию, по минимуму расхода энергии, по точности, по надежности и т.д.
Необходим компромисс между максимальным приближением к оптимальному режиму и простотой технической реализации.
в) Учитывая большую сложность современных САУ и приближенность математического описания ОУ и элементов системы, нельзя ограничиваться только аналитическими расчетами. Окончательно параметры законов управления определяются в процессе натурных экспериментов.
При проектировании решаются следующие задачи:
- Анализ объекта управления: определение статических, динамических характеристик, математической модели.
- Выбор и обоснование критерия оптимизации и других требований, которым должна удовлетворять проектируемая система.
- Обоснование структурной схемы системы и выбор технических средств ее реализации.
- Синтез оптимальных динамических характеристик систем (законов управления) с учетом всех требований и ограничений.
- Выбор желаемых динамических характеристик как приближений к оптимальным характеристикам, полученным в результате компромисса между качеством управления с одной стороны, и простотой и надежностью технической реализации с другой стороны.
- Определение динамических характеристик корректирующих устройств из условия обеспечения желаемой динамики системы в целом.
- Выбор схемы и расчет параметров корректирующих устройств.
- Проверка качества процесса управления.
При синтезе САУ выполняются следующие требования:
а) Обеспечение устойчивости или повышение запасов устойчивости системы
 |
Рис. 15.1
б) Повышение точности регулирования в установившихся режимах
 |
-за счет повышения порядка астатизма системы;
-за счет увеличения коэффициента передачи k разомкнутой системы.
Рис. 15.2
в) Улучшение переходных процессов
 |
Рис. 15.3
2. Основные типы корректирующих устройств: последовательное, параллельное и в цепи обратной связи
По способу включения в схему системы корректирующие устройства разделяются на следующие три типа:
- последовательные К.У.,
- параллельные К.У.,
- корректирующие устройства в цепи местной обратной связи.
 |
Рис. 15.4
Wс(p) - передаточная функция части системы, непосредственно связанной с корректирующим контуром;
Wпз(p) - передаточная функция последовательного корректирующего устройства;
Wп(p) - передаточная функция параллельного корректирующего устройства;
Wос(p) - передаточная функция корректирующего устройства в цепи местной обратной связи;
W1(p) - передаточная функция системы, не связанная непосредственно с корректирующим устройством.
Получаем
Все рассмотренные корректирующие устройства в принципе (теоретически) имеют равные возможности воздействия на динамические характеристики. Однако, из простоты технической реализации, надежности для конкретной схемы может отдаваться предпочтение одному из этих корректирующих устройств.
Это вытекает из связи между соответствующими передаточными функциями

и так далее.
- Последовательное корректирующее устройство наиболее удобно, когда сигнал управления представляет напряжение постоянного тока. В этом случае используют пассивные электрические четырехполюсники, обеспечивающие разнообразное преобразование сигнала.
- Корректирующее устройство в цепи местной обратной связи обычно охватывают исполнительное устройство или усилитель мощности. Если при этом
 то
то 
В этом случае участок прямой цепи, охваченной  , будет полностью определять динамические свойства корректирующего устройства. Это очень важно.
, будет полностью определять динамические свойства корректирующего устройства. Это очень важно.
Рассматривают гибкие обратные связи и жесткие обратные связи. Гибкие обратные связи действуют только в переходном режиме  . Жесткая обратная связь действует и в переходном, и в установившемся режиме
. Жесткая обратная связь действует и в переходном, и в установившемся режиме  .
.
- Параллельные корректирующие устройства используются при реализации сложных законов управления.
3. Простейшие законы управления и примеры коррекции динамических свойств СУ
Закон управления представляет собой связь между выходным u и входным e сигналами УУ или регулятора.
 |
Рис. 15.5
Простейшие законы управления:
- Пропорциональный (П) закон управления.
 ,
,  .
.
- Интегральный (И) закон управления.
 ,
,  .
.
- Пропорционально-интегральный (ПИ) закон управления.
 ,
,  .
.
- Пропорционально-интегрально-дифференциальный закон управления.
 ,
,  ,
,
Этот закон идеализирован.
Рассмотрим коррекцию динамических свойств звеньев.
 Необходимо снять инерционность апериодического звена за счет уменьшения T.
Необходимо снять инерционность апериодического звена за счет уменьшения T.
За счет  , удается уменьшить инерционность, но и коэффициент передачи также уменьшается.
, удается уменьшить инерционность, но и коэффициент передачи также уменьшается.
Если связь будет положительная, то
 .
.
Если  , то от апериодического звена переходим к интегрирующему, т.е. повышаем астатизм системы и уменьшаем ошибку. Однако если окажется
, то от апериодического звена переходим к интегрирующему, т.е. повышаем астатизм системы и уменьшаем ошибку. Однако если окажется  , то устройство окажется неустойчивым.
, то устройство окажется неустойчивым.
А теперь рассмотрим гибкую обратную связь.
 |
Если связь будет положительная, то
4. Инвариантность СУ
Компенсация внешнего воздействия (обеспечение инвариантности). Рассмотренные выше способы улучшения статических и динамических свойств системы связаны лишь с изменениями параметров элементов САУ и структуры ее отдельных участков, но при этом не затрагивают принципа действия системы.
Помимо принципа регулирования по отклонению существует принцип регулирования по внешнему воздействию (см. гл. 1). Значительный эффект дает их одновременное использование. В этом случае системы называются комбинированными. Кроме замкнутого контура они имеют дополнительную цепь влияния внешнего воздействия — возмущения или задающего.
Системакомбинированного регулирования. Комбинированное регулирование используют в системах для уменьшения влияния сильного возмущения. Это возможно в том случае, если возмущение доступно измерению. При этом в системе создается дополнительная цепь воздействия основного возмущения. На рис. 15.8 показана структурная схема такой системы. Здесь W1, W2, W3 и W4 – передаточные функции регулируемого объекта, исполнительного элемента и двух каскадов усилителя;
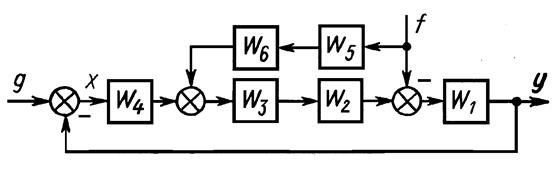
Рис. 15.8
W5 и W6 - передаточные функции измерительного и преобразовательного элементов дополнительной цепи воздействия возмущения f. Эта дополнительная цепь должна компенсировать влияние возмущения f на регулируемую координату у, поэтому ее следует называть компенсирующей. Компенсирующую цепь обычно включают в прямую цепь системы между каскадами усилителя или на вход последовательного корректирующего устройства (если таковое имеется).
Составим передаточную функцию замкнутой системы (рис. 5.8) относительно возмущения:
Wfy=W1(Wк·цW3W2 – 1)/(1+W), (5.29)
где Wк·ц=W5W6 – передаточная функция компенсирующей цепи; W= W1W2W3W4 - передаточная функция разомкнутого контура.
Если
W2W3 Wк·ц =1, (5.30)
то передаточная функция системы относительно возмущения f равна нулю и возмущение f не влияет на регулируемую координату. В этом случае говорят, что регулируемая координата у инвариантна (независима) от возмущения f.
Один из разделов теории автоматического управления изучает принципы построения САУ, реализующие полную или частичную инвариантность от внешних возмущений. Этот принцип носит название принципа инвариантности. Большое значение в развитии теории инвариантности и ее практическом приложении имели работы В. С. Кулебакина, Н. Н. Лузина, Б. Н. Петрова и др.
Равенство (5.30) является условием полной инвариантности от f. Полкой (с точностью до переходной составляющей) инвариантностью называют независимость регулируемой координаты у от изменений возмущения f - независимость функций у (t) от вида функции f(t). Однако начальные значения возмущения и его производных создают переходную составляющую регулируемой координаты. Если же и начальные значения возмущения и его производных не влияют на регулируемую координату, то имеет место абсолютная инвариантность, для достижения которой необходимо удовлетворение дополнительных условий. Так, в рассматриваемой системе абсолютная инвариантность будет иметь место только при безынерционных элементов W2, W3, W5 иW6.
| <== предыдущая лекция | | | следующая лекция ==> |
| Приближенная оценка качества САУ | | | Синтез корректирующих устройств |
Дата добавления: 2015-12-11; просмотров: 1512;