Способы загрузки и разгрузки. Загрузка люлечных элеваторов производится на восходящей ветви, разгрузка – в любом месте нисходящей ветви
Загрузка люлечных элеваторов производится на восходящей ветви, разгрузка – в любом месте нисходящей ветви. Ручная загрузка производится непосредственно установкой грузов на движущиеся люльки и разгрузка обеспечивается направляющими, стабилизирующими положение люльки в зоне загрузки.
Для автоматической загрузки и разгрузки люлек применяются выдвижные и поворотные колосниковые и роликовые столы. Загрузка и разгрузка полочных элеваторов производится автоматически или вручную. Наиболее удобными для автоматизации загрузки и разгрузки являются грузы цилиндрической формы, т. к. их можно перекатывать по наклонному настилу или перегружать с колосникового стола на гребенчатую полку, а затем на стол.
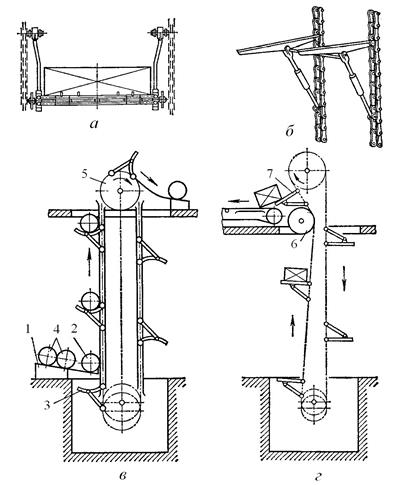
Рис. 5.10. Конструкция люльки (а) и полки (б);
схемы (в, г) загрузки и разгрузки полочных элеваторов:
1 – скаты; 2, 4 – бочки;3 – захват; 5 – головная звездочка;
6 – отклоняющая звездочка; 7 – полка
Используется разгрузка на восходящей ветви (рис. 5.50, г) путем отклонения полки с помощью дополнительных отклоняющих звездочек.
Захваты-полки могут снабжаться специальным поворотным приспособлением, позволяющим разгружать груз в любом месте на восходящей ветви элеватора и управляемым с помощью упоров или направляющих шин, выдвигаемых в месте разгрузки. Поворотные части захватов после разгрузки возвращаются в исходное положение с помощью пружин или направляющих шин.
5.2.3 Особенности расчета люлечных и полочных элеваторов [1, 2]
Производительность
Z = 3600 v zе / а, (5.22)
где zе – число штучных грузов на одном несущем элементе;
а – шаг несущих элементов.
Мощность привода
Р = kз Pв / η0, (5.23)
где kз= 1,05 – коэффициент запаса мощности;
Рв – мощность на валу приводного элемента;
η0 – кпд передаточного механизма.
Тяговое усилие
W0 = Pв / v. (5.24)
Максимальное натяжение цепи
Smax = W0 + Smin + W н.в., (5.25)
где W н.в. – сила сопротивления нисходящей ветви.
W н.в = q0 H (sinβ – ω cosβ), (5.26)
где q0 – распределенная масса ходовой части.
Разрывное усилие цепи
Рр = Sрасч nк cн / zк, (5.27)
где nк= 7–10 – запас прочности цепи;
cн= 1,1–1,25 – коэффициент неравномерности распределения нагрузки между параллельными ветвями цепи;
zк – число параллельных ветвей цепи.
По максимальному натяжению производится выбор цепи, определение передаточного числа и выбор редуктора, расчет тормозного момента и выбор тормоза.
Тяговый расчет выполняется методом обхода по контуру трассы. Натяжение цепи в точке набегания цепи на натяжную звездочку принимают Smin = 1000–2000 Н. Максимальное натяжение цепей в точке набегания на приводные звездочки Smax = Sнб.
Контрольные вопросы
1. Общее устройство, классификация, назначение и области применения элеваторов.
2. Преимущества и недостатки ковшовых элеваторов.
3. Основные элементы и основные параметры ковшовых элеваторов.
4. Тяговые органы ковшовых элеваторов. Чем определяется выбор тягового элемента?
5. Типы и назначение ковшей ковшовых элеваторов, способы установки и крепления ковшей.
6. Способы загрузки и разгрузки ковшовых элеваторов.
7. Определение полюсного расстояния. От чего зависит полюсное расстояние?
8. Алгоритм расчета ковшового элеватора.
9. Назначение, общее устройство и конструктивные особенности люлечных и полочных элеваторов.
10. Способы загрузки и разгрузки люлечных и полочных элеваторов.
11. Основы выполнения расчета люлечных и полочных элеваторов.
Дата добавления: 2015-10-22; просмотров: 1910;