Конструкции токоприемников
Токоприемником называется аппарат, предназначенный для передачи электрической энергии от электротяговой сети к электрооборудованию электроподвижного состава (ЭПС).
Конструкция токоприемника должна обеспечивать надежный съем с контактной подвески определенного заданного тока при максимальной скорости движения, на которую рассчитан ЭПС.
В России и за рубежом эксплуатируются токоприемники разных конструкций. Это разнообразие конструкций вызвано тем, что ЭПС имеет различную мощность, а следовательно, и снимаемый ток имеет разные значения. Поэтому токоприемники могут иметь разное число полозов и контактных пластин. Кроме того, могут существенно различаться скорости, на которые рассчитаны разные ЭПС. Чем выше конструкционная скорость ЭПС, тем совершеннее должна быть конструкция токоприемника, как с точки зрения аэродинамики, так и с точки зрения уменьшения его приведенной массы, взаимодействующей с контактной подвеской.
В зависимости от токовой нагрузки (нагрузочной способности) токоприемники в России подразделяют на два типа:
– типа Т («тяжелые»), предназначенные для грузовых и пассажирских электровозов постоянного тока и двойного питания; при движении они должны длительно обеспечивать съем с контактного провода тока 2200 А;
– типа Л («легкие»), предназначенные для грузовых и пассажирских электровозов переменного тока и электропоездов постоянного и переменного тока; при движении они должны обеспечивать длительно съем с контактного провода тока 500 А.
Обозначения токоприемников (наиболее часто применяемые):
Л-13У
материал токосъемных пластин (М – медные; У – угольные, Мкм – металлокерамические на медной основе, Мкж – металлокерамические на железной основе);
номер модели;
тип (Т или Л).
Конструктивно токоприемники состоят из четырех основных частей: основания, укрепленного на четырех опорных изоляторах; подвижной рамной системы, собранной из легких элементов – рычагов, связанных шарнирами; контактной системы – кареток и одного или двух полозов с токосъемными пластинами; механизма подъема и опускания, состоящего из пневматического привода, пружин и рычагов.
Устройство механизма подъема и опускания токоприемника П-3 приведено на рисунке 95.
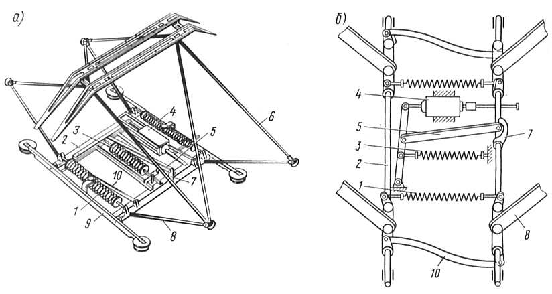
Рисунок 95 – Устройство механизма подъема и опускания токоприемника П-3
Нижние трубы рамы токоприемника 8 укреплены на основании 9 с помощью валов 2. Одновременное движение всех деталей вверх или вниз обеспечивается соединением валов 2 двумя тягами 10. Верхняя часть рамы токоприемника также состоит из стальных труб 6, собранных в две рамы с расположенными по диагонали и направленными противоположно друг другу распорками.
Для подъема и опускания токоприемника предусмотрены пружины 1 и 3, пневматический цилиндр 4 и рычажная система. Когда давление воздуха в цилиндре равно атмосферному, токоприемник опущен. При этом пружины 1 растянуты, но не могут поднять его, так как им противодействует давление пружины 3, приложенное к рычагу 7. Для подъема токоприемника впускают сжатый воздух в цилиндр 4, его поршень отводит в сторону рычаг 5, воздействие пружины 3 на рычаг 7 прекращается и пружины 1 поднимают токоприемник. Чтобы опустить токоприемник, выпускают воздух из цилиндра 4, тогда пружина 3 нажимает через рычаг 5 на рычаг 7 и токоприемник опускается.
В пневматических цилиндрах применяют специальные редукционные клапаны для автоматического изменения скорости вертикального перемещения полоза при подъеме и опускании токоприемника. Они обеспечивают быстрый начальный подъем опущенного токоприемника, а затем медленное его приближение к контактному проводу, чтобы полоз коснулся контактного провода без удара. При опускании токоприемника полоз, наоборот, быстро отрывается от контактного провода, а затем спокойно опускается вниз. Такие режимы достигаются автоматическим регулированием скорости подачи сжатого воздуха в цилиндр и выпуска его в атмосферу. Время подъема токоприемника из сложенного положения до максимальной рабочей высоты при номинальном давлении сжатого воздуха должно составлять 7–10 с, а время опускания – 3,5–6 с.
Постоянный контакт полоза токоприемника с проводом в случае изменения его высоты обеспечивается при движении электроподвижного состава перемещением подвижной системы токоприемника и работой только его подъемных пружин.
Полозы токоприемника крепятся к верхней подвижной раме при помощи кареток. На рисунке 96 приведены возможные варианты их конструкций:
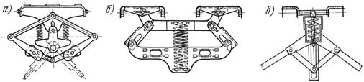
Рисунок 96 – Варианты конструктивного исполнения кареток токоприемников
Каретки токоприемников предназначены для улучшения качества токосъема при проходе «жестких» точек (мест с резким уменьшением эластичности контактного провода или наличием на нем сосредоточенных масс – зажимов и др.) и струновых пролетов цепной контактной подвески, в которых контактный провод имеет неодинаковую эластичность. В эти моменты полозы вертикально перемещаются благодаря кареткам, т. е. с контактным проводом взаимодействует не весь токоприемник, а только его верхний узел, имеющий небольшую массу. Это уменьшает динамическую составляющую нажатия токоприемника на контактный провод, что обеспечивает лучшее качество токосъема, особенно при высоких скоростях движения. В двухполозных токоприемниках каретки обеспечивают так-же равномерное нажатие между полозами.
Качественный токосъем токоприемниками при более высоких скоростях движения обеспечивают демпфированием их рам, а в некоторых случаях и полозов. Демпфирование рам осуществляют с помощью телескопических гидравлических демпферов.
Элементы токоприемника перемещаются вертикально при его движении вдоль контактной подвески в результате неодинаковой эластичности контактного провода в струновых пролетах, неодинаковой эластичности цепных подвесок в середине пролета и у опор, местных изменений высоты подвеса контактного провода над верхом головок рельсов у малогабаритных искусственных сооружений, на станциях и т. п. Неодинаковая эластичность контактного провода в струновых пролетах вызывает вертикальные колебания полоза токоприемника с амплитудой 0,03–0,04 м, а неодинаковая эластичность в середине пролета и у опор – с амплитудой 0,2–0,3 м.
Местные изменения высоты подвеса контактного провода у искусственных сооружений и на станциях (выполняемые с постепенным уклоном контактного провода, например 0,002) вызывают значительные вертикальные перемещения полоза токоприемника, достигающие 1,2–1,5 м. Таким образом, на большей части линии полоз токоприемника совершает вертикальные перемещения с амплитудой до 0,35 м и только на коротких участках пути – значительные вертикальные перемещения, достигающие 1,5 м. Этим обстоятельством пользуются при разработке конструкций токоприемников для высоких скоростей движения.
Чтобы обеспечить большой рабочий ход (1,5–2 м) и качественный токосъем при высоких скоростях движения, токоприемники выполняют сдвоенными (двухступенчатыми), т. е. из двух расположенных одна над другой подвижных систем. Верхняя подвижная система с рабочим ходом 0,4—0,5 м и небольшой массой взаимодействует с контактной подвеской по высоте в пределах разности отжатий контактного провода в середине пролета и у опор; обе подвижные системы токоприемника взаимодействуют с контактной подвеской на участках со значительным изменением высоты подвеса контактного провода над уровнем головок рельсов. Такую конструкцию имеет токоприемник Сп-6М, эксплуатируемый на электровозах ЧС-200 и электропоездах ЭР-200, внешний вид которого приведен на рисунке 97.

Рисунок 97 – Внешний вид токоприемника Сп-6М
Дата добавления: 2015-10-22; просмотров: 2866;