Домкраты
Эти устройства могут иметь ручной, электрический, гидравлический или пневматический привод.
Устройства с ручным приводом основаны на том, что человек, прикладывая сравнительно малое усилие – в среднем 16кгс (160Н), может поднимать значительный груз.
Домкраты обычно используют для подъёма груза на небольшую высоту, причём воздействие на груз снизу; их делят на реечные(грузоподъемностью до 6т, высота подъёма до 0,5м), винтовые (грузоподъёмностью от 2т до 50т, высота подъёма до 0,38м) и гидравлические(грузоподъёмностью 50…500т, высота подъёма 0,15…0,2м).
Домкраты представляют собой компактные грузоподъёмные устройства. Подъём груза они осуществляют плавно. Домкраты общего назначения и специальные применяются на различных монтажных, выверочных и ремонтных работах, при бестраншейной прокладке трубопроводов, используются в конструкциях строительных машин (кранов, экскаваторов, подъёмников) в качестве выносных опор и т.п.
Реечный домкрат (рис. 9.97.) состоит из деревянного или металлического корпуса 1, в котором по направляющим перемещается зубчатая рейка 2, имеющая наверху грузовую поворотную головку 3, а внизу лапу 4 для подъёма низко расположенных грузов. Грузоподъёмность на лапе обычно равна половине основной грузоподъёмности на головке домкрата. Рейка перемещается в направляющих корпуса при вращении рукоятки 5, передающей движение через зубчатую передачу 6 с одной или двумя парами шестерён. Передаточное число одной зубчатой пары 4-6, а число зубьев малых (ведущих) шестерён не превышает 4-5. Для удержания поднятого груза служат храповое колесо 7 с собачкой 8.

Рис. 9.97.Реечный домкрат
1 - корпус; 2 - зубчатая рейка; 3 - поворотная головка; 4 - лапа; 5 - рукоятка; 6 - зубчатая передача; 7 - храповое колесо; 8 - собачка.
Усилие (в Н) на рукоятке для подъёма груза
 ,
,
где Q – вес груза, Н; dш – диаметр начальной окружности шестерни, находящийся в зацеплении с рейкой, мм; R – длина рукоятки, R=200-250мм;
i – передаточное число зубчатой передачи; η – КПД передачи (при одной зубчатой паре η=0,8-0,85; при двух зубчатых парах η=0,65-0,7)
Реечные домкраты изготавливают грузоподъёмностью 3-5т при максимальной высоте подъёма 0,4-0,6м. Они применяются для правки стальных конструкций, выверки колонн, подъёма грузов, а также при погрузочно-разгрузочных, монтажных и ремонтных работах.
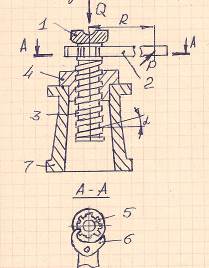
Винтовой домкрат (рис. 9.98.) перемещает груз вращающимся стальным винтом 3, составляющим винтовую пару с бронзовой или чугунной гайкой, запрессованной в металлический корпус 7. Гайка и винт имеют однозаходную прямоугольную или трапециидальную резьбу. На головке винта шарнирно закреплена опорная грузовая чаша 1, воздействующая на груз. Для вращения винта используют рукоять 2 с храповым колесом 5 и двусторонней собачкой 6. Храповое колесо крепится к винту, собачка – к рукоятке. При возвратно-поступательном движении рукоятки зуб собачки входит в зацепление с зубьями храпового колеса и поворачивает его вместе с винтом. Винтовые пары домкратов выполняют самотормозящимися (угол подъёма винтовой линии α меньше угла трения ρ), что исключает возможность самопроизвольного вращения винта под действием нагрузки. Соблюдение условия самоторможения отрицательно влияет на КПД домкрата, который не превышает 0,3-0,4. Низкий КПД является недостатком винтовых домкратов.
При определении окружного усилия Р, приравняем работу, совершаемую рабочим за один оборот рукоятки домкрата, к работе, которая затрачивается на подъём груза.
 ,
,
где P – окружное усилие, прилагаемое рабочим, Н; R – длина рукоятки, мм; Q – вес поднимаемого груза или величина преодолеваемого сопротивления, Н; S – величина перемещения груза на один оборот рукоятки (соответствует шагу винта домкрата), мм;
η – КПД устройства.
 где
где
Также окружное усилие Р (в Н), прилагаемое к рукоятке при подъёме груза весом Q (в Н), может быть определено как
где r – средний радиус резьбы винта, мм; ρ – угол трения в резьбе, град; α – угол подъёма винтовой линии, α=4-6º.
В связи с тем, что винтовые домкраты чаще всего самотормозящиеся, то они не требуют никаких дополнительных устройств для удержания груза.
 Винтовые домкраты изготавливаются грузоподъёмностью от 2 до 50т. При грузоподъёмности, превышающей 20т, вращение винта домкрата осуществляется через червячную передачу. Винтовые домкраты имеют ручной или электрический привод. Они используются как при монтажных и ремонтных работах, так и для осуществления наиболее рациональных механизированных способов подъёма опалубки, подмостей и т.д.
Винтовые домкраты изготавливаются грузоподъёмностью от 2 до 50т. При грузоподъёмности, превышающей 20т, вращение винта домкрата осуществляется через червячную передачу. Винтовые домкраты имеют ручной или электрический привод. Они используются как при монтажных и ремонтных работах, так и для осуществления наиболее рациональных механизированных способов подъёма опалубки, подмостей и т.д.
Рис. 9.98. Винтовой домкрат
1 - опорная грузовая чаша; 2 - рукоять; 3 - вращающийся стальной винт; 4 - чугунная или бронзовая гайка; 5 - храповое колесо; 6 - двухсторонняя собачка; 7 - металлический корпус.
Гидравлический домкрат. По сравнению с винтовыми и реечными домкратами обладают большей грузоподъёмностью (до 300т), плавностью подъёма и опускания груза, точностью остановки его на заданном уровне и более высоким КПД. Гидравлический домкрат с ручным приводом (рис. 9.99.) состоит из цилиндра 1 с поршнем 2, плунжерного насоса и бака 3 для рабочей жидкости. Рабочей жидкостью служит веретённое масло или незамерзающая смесь (вода, смешанная со спиртом и глицерином). Плунжерный насос включает цилиндр 4, плунжер 5,перемещением рукоятки 6, нагнетательный 7 и всасывающий 8 клапаны. При возвратно-поступательном движении плунжера жидкость из бака через клапаны 7 и8 перекачивается в рабочий цилиндр 1 домкрата и давит на поршень 2, поднимая его вместе с грузом. Для опускания груза сливают жидкость из рабочего цилиндра обратно в бак 3 через сливной кран 9.
Гидравлический домкрат с ручным приводом имеют грузоподъёмность 5-200т при высоте подъёма до 0,18м, с механическим приводом – грузоподъёмность 50-300т. Для преодоления сопротивлений подъёма, по своей величине превышающих грузоподъёмность одного домкрата, соединяют несколько гидравлических домкратов в общую батарею, работающую от одного насоса с электроприводом.

Рис. 9.99. Гидравлический домкрат.
1 - цилиндр; 2 - поршень плунжерного насоса; 3 - бак с рабочей жидкостью; 4 - цилиндр;
5 - плунжер; 6 - рукоять; 7 - нагнетательный клапан; 8 - всасывающий клапан; 9 - сливной кран.
Для подъёма домкратом груза весом Q (Н) к рукоятке необходимо приложить усилие (в Н)
где η – КПД домкрата, η=0,8-0,9; i – общее передаточное отношение домкрата; D – диаметр поршня домкрата, мм; d – диаметр плунжера насоса, мм; R и r – плечи рукоятки, мм.
В беспоршневых домкратах в замкнутый объём, который может деформироваться (рис. 12.100.), накачивается масло под высоким давлением. Под действием этого давления стенки домкрата перемещаются; величина перемещения а (ход домкрата) достигает 20мм. Их грузоподъёмность достигает 200т. В этих домкратах
где F – площадь поперечного сечения домкрата, см2; Р – давление масла, мПа.

Рис. 9.100. Беспоршневой гидравлический домкрат.
Тали
Тали представляют собой простое по устройству и небольшие по размерам грузоподъёмные машины, подвешенные к высоко расположенным опорам.
Их применяют при монтаже и ремонте санитарно-технических устройств, запорной арматуры трубопроводов в местах недоступных для передвижения кранов. Тали применяют только для подъёма и опускания или подтягивания небольших грузов, стягивания между собой отдельных элементов при монтажных работах натягивания канатов и проводов при усилиях 0,1-5тс (1-5кН).
В зависимости от привода тали подразделяются на ручные и электрические.
Электрические тали, подвешиваемые к тележкам, которые передвигаются по рельсу, называются электротельферами (рис. 9.101.). Тележки электроталей в большинстве случаев имеют электрический привод. Электротельферами управляют снизу при помощи свисающего лёгкого пульта, соединённого с электроаппаратурой тельфера гибким кабелем.
Электроталь состоит из электродвигателя, барабана 1, на котором подвешен грузовой полиспаст с крюковой обоймой, зубчатых передач 2, многодискового тормоза 3, управляемого электромагнитами, и автоматического грузоопорного дискового тормоза. Как только груз отделяется от земли, на зубчатом колесе 4 возникает момент, который перемещает колесо по резьбе 6 к храповику 7 и зажимает его, после чего эта система (диск 8, храповик и зубчатое колесо) продолжает вращаться как одно целое.
При окончании подъёма и прекращении работы привода груз начал бы опускаться и вращать валы механизма в обратную сторону, но собачка 9 сейчас же упирается в храповик и зубчатое колесо, связанное с храповиком силой трения, и дальнейшее опускание груза прекращается. При опускании груза вал 5вращается в сторону опускания, зубчатое колесо отходит от храповика вправо, тормоз размыкается, и груз под действием собственного веса опускается, однако, подчиняясь закону свободного падения, он опускается ускоренно, приводя в такое же ускоренное движение все звенья подъёмного механизма, в том числе и зубчатое колесо. В результате через короткий промежуток времени зубчатое колесо начинает обгонять вал и перемещаться по резьбе 6 влево, доходит до храповика и зажимает его. При этом тормоз замыкается и останавливает груз. Продолжающий вращаться в направлении опускания груза рабочий вал снова отводит зубчатое колесо вправо, размыкает тормоз, и груз снова получает возможность свободно опускаться, что завершается, как и в первом цикле, автоматическим замыканием тормоза.

Рис. 9.101.Кинематическая схема электротельфера.
1 - барабан с грузовым полиспастом; 2 - зубчатые передачи; 3 - многодисковый тормоз;
4 - зубчатое колесо; 5 - вал; 6 - резьба; 7 - храповое колесо; 8 - диск; 9 - собачка.
Электрические передвижные тали выпускают грузоподъёмностью от 0,25 до 5т при высоте подъёма 6м. Применяются также электротали грузоподъёмностью 10т. Благодаря компактности конструкции, простоте обслуживания и лёгкости установки электротали находят широкое применение для выполнения подъёмно-транспортных, монтажных и ремонтных работ.
Широкое распространение также нашли ручные тали с червячным механизмом подъёма (рис. 9.102.), гибким тяговым органом которым служит сварная калиброванная или пластинчатая цепь. Грузоподъёмность таких талей 0,5-10т, высота подъёма груза до 3м.
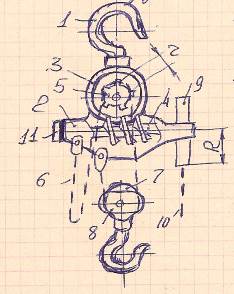
Рис. 9.102. Ручная червячная таль.
1 - крюк; 2 - неподвижная обойма; 3 - червячное колесо; 4 - червяк; 5 - ведущая звёздочка; 6 - грузовая цепь; 7 - звёздочка; 8 - крюковая обойма; 9 - приводное колесо; 10 - бесконечная цепь; 11 - грузоопорный тормоз с храповым остановом.
Таль подвешивается над грузом на крюке 1, шарнирно соединённом с неподвижной обоймой 2. В обойме смонтированы червяк 4 и червячное колесо 3, выполненное заодно с ведущей звёздочкой 5грузовая цепь 6, перекинутая через звёздочку 5 огибает звёздочку 7 подвижной крюковой обоймы 8 и прикрепляется к корпусу тали, образуя двукратный полиспаст для выигрыша в силе. При вращении бесконечной цепью 10 приводного колеса 9 движение через червячную передачу сообщается ведущей звёздочке 5, которая путём перематывания грузовой цепи производят подъём или опускание крюковой обоймы. Удержание груза на высоте обеспечивает дисковый грузоопорный тормоз 11 с храповым остановом.
Усилие (в Н), прилагаемое в тяговой цепи при подъёме груза весом Q (в Н);
где iп – кратность полиспаста; r – радиус ведущей звёздочки, мм; R – радиус приводного колеса, мм; iч - передаточное число червячной передачи; η – КПД тали (η=0,55-0,75)
Дата добавления: 2015-10-19; просмотров: 6577;