Датчики
Датчики преобразуют управляемую координату в электрический сигнал, использующийся как сигнал обратной связи (ОС).
Датчик – устройство, информирующее о состоянии управляемой координаты электропривода, путем взаимодействия с ней и преобразуя реакцию в электрический сигнал.
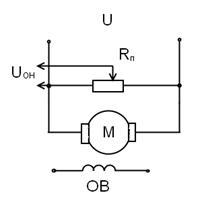
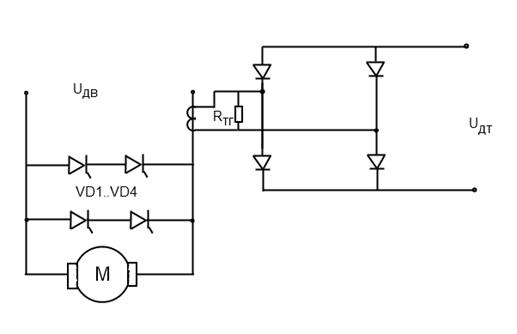
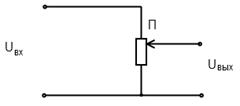
Датчики напряжения выполняются на основе потенциометра, коэффициент ОС определяется положением движка потенциометра.
a)двигатель постоянного тока
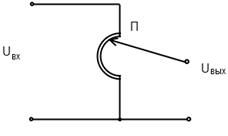
б) двигатель переменного тока
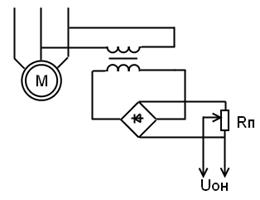
Для получения сигнала ОС по напряжению в двигателе переменного тока используют трансформаторы.
Датчики ЭДС. При не высоких требованиях диапазона регулирования скорости (Д=50) в качестве ОС применяются ОС по ЭДС.
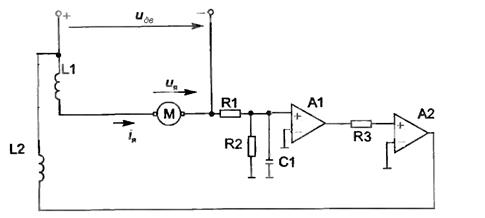
Функциональная схема датчика ЭДС.
Для измерения напряжения используется делитель напряжения на R1, R2 и C1 с выходным напряжением определяемым, как
L1, L2 - сглаживающие дроссели.
Для измерения тока может использоваться L2.
Датчик тока предназначен для получения информации о силе и направлении тока в электроприводе и к ним предъявляются следующие требования:
1)линейность характеристики управления
2)наличие гальванической развязки в силовой цепи в системе управления
3) высокое быстродействие
В качестве измерителей тока используется трансформатор тока, дополнительное и компенсационное обмотки, сглаживающий дросселей, датчики Холла и шунт.
Датчик тока на основе трансформатора тока используется в автоматизированном электроприводе для измерения тока двигателя при питании их от симметричных мостовых схем, однофазных и трехфазных выпрямителей.
Для однофазного выпрямителя используется один трансформатор тока.
Для трехфазного – 3 трансформатора тока.
Коэффициент передачи датчика тока определяется, как

 - ток якорной цепи.
- ток якорной цепи.
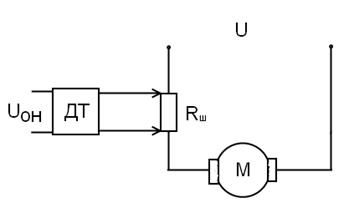
Широкое применение получили шунты – это четырех зажимный резистор с активным сопротивлением. К токовым зажимам подключается токовая часть, а к потенциальным – измерения.
По закону Ома падение напряжения на сопротивлении шунта:

Т.к. шунт имеет связь с силовой цепью, датчик тока должен содержать устройство гальванической развязки. В качестве таких устройств применяются трансформаторные и оптоэлектронные устройства. Коэффициент передачи для датчика тока определяется:

 - коэффициент гальванической развязки и коэффициент усилителя.
- коэффициент гальванической развязки и коэффициент усилителя.
В датчиках скорости используются тахогенератор и импульсные датчики скорости. Тахогенераторы используются в аналоговых схемах, импульсные датчики – в цифровых схемах.
Датчикам скорости предъявляются жесткие требования по линейности, стабильности выходного напряжения и уровня пульсации.
Широкое распространение получили тахогенераторы с постоянными магнитами. Для уменьшения оборотов пульсации тахогенератор встраивается в двигатель.
Основной зависимостью тахогенератора является ЭДС от скорости:

 - коэффициент передачи тахогенератора (крутизна характеристики)
- коэффициент передачи тахогенератора (крутизна характеристики)
В импульсных датчиках скорости в качестве первичного измерительного преобразователя используется импульсные преобразователи перемещений, у которых количество импульсов пропорционально углу поворота вала:
 - угол поворота вала за время
- угол поворота вала за время  .
.
 - число импульсов.
- число импульсов.
z – число импульсов преобразователя за 1 поворот вала.
Таким образом, можно осуществить подсчет импульсов преобразователя для фиксированного интервала времени :
Этот способ используется при высокой скорости вращения.
При втором варианте осуществляется изменение временного интервала , за который от преобразователя поступает эталонное число импульсов:
Этот способ используется при низкой скорости.
Датчики положения применяются для получения электрического сигнала пропорционального положения исполнительного органа или вала двигателя. В качестве таких датчиков используются селсины, потенциометры, вращающие трансформатора.
Потенциометрические датчики положения выполняются присоединением их движков с валом двигателя, в этом случае выходное напряжение пропорционально его положению.
Вращающийся трансформатор имеет на статоре и роторе по две одинаковых однофазных распределительных обмотки, сдвинутые относительно друг друга на 90°, напряжение с обмоток ротора снимается с помощью контактных колец или щеток, или с помощью кольцевых трансформаторов.
Наиболее распространенный синусно-косинусный трансформатор имеет четыре обмотки, две из которых возбуждения и компенсационная обмотки расположены на статоре и две измерительные расположены на роторе. Ротор соединен с двигателем или рабочим механизмом, положение которых должно измеряться.
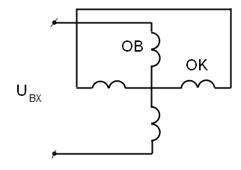
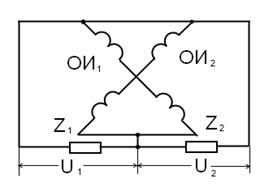
К обмотке возбуждения подводиться напряжение, протекающий под действием напряжения, ток создает в магнитном зазоре магнитный поток, который создает ЭДС во вторичных обмотках. Значение ЭДС в измерительной обмотке (ОИ1) пропорциональна синусу поворота ротора, а в обмотке (ОИ2) косинусу угла φ. Поэтому
 ;
;
 .
.
Это является информацией об угле поворота φ вала машины или двигателя.
Обмотка компенсации (ОК) служит для компенсации вредного влияния магнитного поля, обмоток ротора, снижая погрешность измерения трансформатора.
Сельсин – это электрическая машина переменного тока, имеющая две обмотки: обмотку возбуждения и обмотку синхронизации.
Обмотка синхронизации выполняется трехфазной:
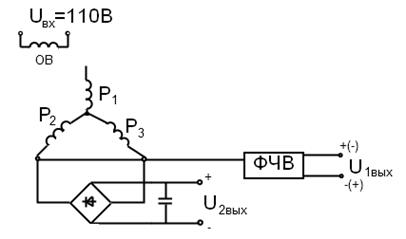
Выходное напряжение снимается с двухфазной обмотки ротора и далее выпрямляется с помощью выпрямителя, либо с помощью фаза-чуствительного выпрямителя (ФЧВ).
В первом случае выходное напряжение будет иметь постоянную полярность, а во втором случае полярность будет зависеть от сдвига фаз напряжения статора и ротора. При повороте ротора амплитуда, наводимая в обмотках ЭДС, изменяется от 0 в начальном положении ротора до максимального значения.
Дата добавления: 2015-10-09; просмотров: 2629;