РЕЙКОВІ ДОМКРАТИ
Такі домкрати вважаються одними із самих простих і виконуються у вигляді механізму лебідки з ручним приводом, в якому останнє зубчасте колесо розвернуте до зубчастої рейки, що торцем піднімає вантаж. Такі домкрати застосовують для підйому вантажів масою від 0,5 до 10 т на висоту до 300-
-3-
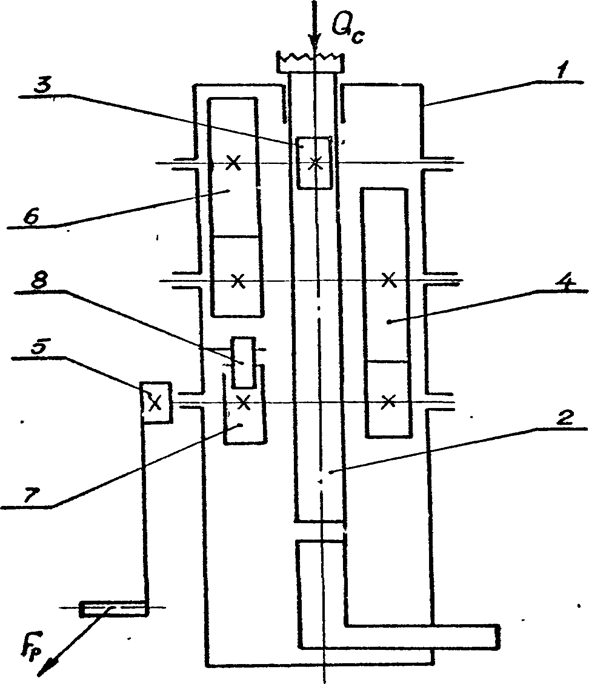 |
Рис. 1. Кінематична схема
рейкового домкрата
-4-
400 мм. Принцип дії і будова рейкового домкрата (рис .1) такі: в напрямних
паралелях дерев'яного або стального кожуха 1 і переміщується зубчаста рейка 2,
на верхньому кінці якої шарнірно встановлена опорна голівка і яка сприймає силу тяжіння від вантажу. Нижній кінець рейки зігнутий під кутом 90° у вигляді лапи, пристосованої для піднімання низько розташованих вантажів.
Рейка 2 входить у зачеплення з шестірню 3, яка приводиться в рух через зубчасті пари 4 та 6 за допомогою важеля 5.
Безпечність роботи досягається вмонтованим храповим механізмом. Храповик 7 жорстко закріплений на валу важеля, а упорна заскочка 8 шарнірно кріпиться на корпусі домкрата. З допомогою цього пристрою вантаж підтримується в піднятому положенні на будь-якій висоті в межах ходу рейки.
Кількість зубчастих пар залежить від вантажопідйомності домкрата. При малій вантажопідйомності домкрат має одну зубчасту пару, а при більшій - дві і більше. Вантажопідйомність на лапу приймають вдвічі меншу ніж на рейку, так як на лапи діє більший згинаючий момент. Шестірню 3, яка входить у зачеплення з рейкою 2, з метою зменшення діаметра, виконують з малою кількістю зубів (z = 4;6;8), а зуби коригують. Плече важеля беруть довжиною від 200 до 250 мм.
Значення к.к.д. такого домкрата змінюється залежно від кількості пар зачеплення. При одній рейковій парі (рейка - шестірня) h = 0,8…0,85, при двох парах (шестірня рейка та одна зубчаста пара) h = 0,65...0,70, а при трьох парах (рейка - шестірня і дві зубчасті пари) h = 0,50...0,55.
Вантажопідйомність домкрата і зусилля на важелі залежатьвідпередаточного числа механізму, яке визначається так:
 (1)
(1)
де Тш – момент, створений вантажем на валу шестірні, що входить в зачеплення з рейкою;
ТР – крутний момент на валу рукоятки, створений робітником;
FP – сила, створена м'язами робітника;
RP – плече рукоятки;
dш – діаметр початкового кола шестірні;  ,
,
Q – вантажопідйомність домкрату,
z – число зубів шестірні, що зачіплюються з рейкою;
m – модуль зачеплення.
- 5 -
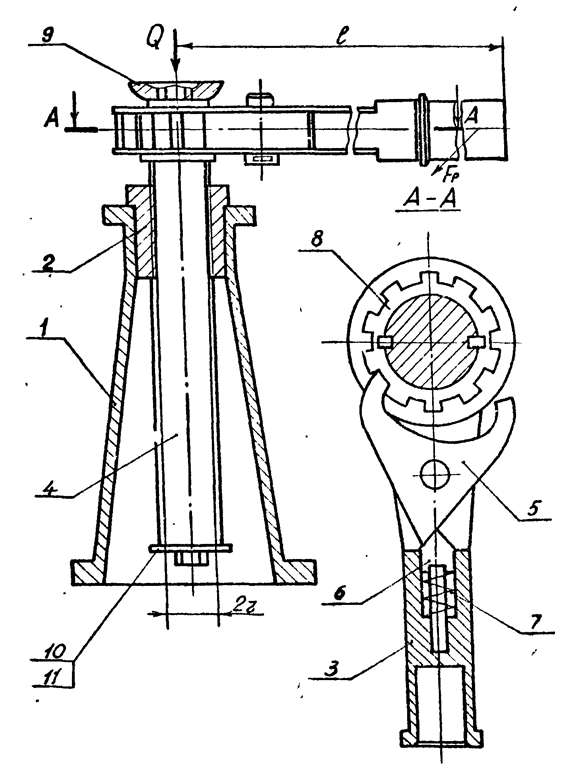 |
Рис. 2. Гвинтовий домкрат
- 6 -
Підставивши ці вирази в рівняння (1), можна визначити
зусилля на важелі:
 Н. (2)
Н. (2)
Рейку домкрата розраховують за формулами складного опору: при підйомі голівкою на згин та стиск, при підйомі лапою – на згин і розтяг. При підйомі вантажу з опорою на лапу вантажопідйомність знижують на половину, так як виникає великий згинаючий рейку і лапу момент.
Дата добавления: 2015-10-05; просмотров: 2613;