Силы сопротивления движению и тяговое усилие транспортной машины
Силы, возникающие при перемещении транспортной машины и препятствующие ее движению, называются силами сопротивления движению.
Перемещение транспортной машины осуществляется под действием тягового усилия (или силы тяги), которое направлено в сторону движения и создается приводом при взаимодействии тяговых элементов (например, приводных колес с рельсами или дорогой). При движении транспортной машины сила тяги равна алгебраической сумме всех сил сопротивления.
При перемещении груза весом Gg (H) скольжением по горизонтальной плоскости (рис. 2.2, а) сила сопротивления движению равна силе трения (Н):

где fi — коэффициент трения скольжения; G — масса транспортируемого груза, кг; g — ускорение свободного падения, м/с2.

Рис. 2.2 Схема к расчету сил сопротивления движению транспортных машин
При перемещении груза в грузонесущем органе, например, в кузове вагонетки или автосамосвала (рис. 2.2, б), имеющем собственный вес G0g (H), сила сопротивления перемещению по горизонтальной плоскости

где w0 — коэффициент ходового сопротивления движению, равный отношению сил сопротивления движению к суммарному весу груза и подвижных частей машины; G0 — собственная масса машины, кг.
Численное значение ходового сопротивления w0 определяют экспериментальным путем в зависимости от диаметра колеса и цапфы, коэффициента трения в подшипнике цапфы, коэффициента трения качения, характеризующегося жесткостью обода колеса (колесо вагонетки или пневмошина автомобиля), и состоянием рельсового пути или дорожного полотна.
Если силы сопротивления движению W0 и суммарный вес транспортируемого груза и подвижных частей машины (G + Go)g выражаются в одних и тех же единицах — ньютонах, то w0 имеет размерность Н/Н, но фактически в расчетах подставляют значение w0 как безразмерной величины. Однако, как правило, W0 выражается в ньютонах, a (G + G0)g — в килоньютонах, так как (G + G0) выражается в тоннах. В этом случае коэффициент w0 приобретает размерность Н/кН и называется удельным сопротивлением. Коэффициентом сопротивления пользуются при расчетах конвейерного и других видов транспорта, а удельным сопротивлением — обычно при расчетах локомотивного и самоходного транспорта.
Таким образом, коэффициент сопротивления транспортной установки определяется силами трения или силами основного сопротивления W0, поэтому w0 называется коэффициентом основного сопротивления.
Кроме основных сопротивлений при движении транспортной машины возникают дополнительные сопротивления на уклоне, на криволинейных участках пути, от воздушной среды и от сил' инерции при переменной скорости движения.
При движении транспортной машины по наклонной плоскости с углом наклона b (рис. 2.2, в) кроме основного сопротивления (Н)

возникают дополнительные сопротивления (Н), обусловленные продольной составляющей веса груза и машины:

Знак «плюс» принимается при движении транспортной машины вверх, «минус» — вниз.
Если угол наклона b<4° (например, как при локомотивной откатке), то в этом случае cosb » l, sin b = tgb = i¢ = i/1000. Тогда коэффициент дополнительного сопротивления на уклоне равен ± i, где i — уклон пути, выраженный в тысячных долях — промилле (‰). Удельное сопротивление (Н/кН) от уклона определяется по формуле wy = l000tgb и по абсолютной величине равно количеству промилле. Например, при уклоне i¢ = 0,003 или i = 3‰ wу = 3 Н/кН..
При движении транспортной машины на криволинейных: участках пути возникают дополнительные сопротивления (например, вследствие проскальзывания колес автомобиля yа поворотах, дополнительного трения реборд колес вагонеток о головки рельсов, гибкового тягового органа конвейера при прохождении направляющих роликов и барабанов и т. д.). В каждом конкретном случае удельное сопротивление на криволинейных участках пути wкр (Н/кН) определяется расчетным путем или при экспериментальных замерах.
Сопротивление воздушной среды прямо пропорционально квадрату скорости движения v (км/ч) транспортной машины и площади Wл (м2) ее лобового сечения, приближенно равной произведению ширины колеи транспортной машины на ее., высоту. Таким образом, сопротивление воздушной среды (Н)

где р = 6÷7,5 — коэффициент обтекаемости (для автосамосвалов).
Сопротивления воздушной среды учитывают только при скорости транспортной машины ν>20 км/ч.
Сопротивление от сил инерции или от динамической нагрузки возникает при неустановившемся движении с ускорением или замедлением а (м/с2) транспортной машины приведенной массой М (кг), т. е. массой системы вращающихся и поступательно движущихся частей транспортной машины и груза, приведенной к точке приложения силы тяги. Таким образом,

где kин — коэффициент учета инерции вращающихся масс транспортной машины, например, для локомотивного транспорта kин= 1,075.
Удельное динамическое сопротивление (Н/кН)
Сила тяги F (Н), развиваемая приводом транспортной машины, должна преодолевать суммарное сопротивление движению Wс (H), т. е.

где z — число транспортных сосудов.
Зависимость тягового усилия транспортной машины от суммарных статических ∑Wст и динамических Wд сил сопротивления называется уравнением движения транспортной машины:

При расчете транспортных установок с гибким тяговым органом (например, конвейеров с ленточным, цепным и канатным тяговым органом, подвесных канатных дорог) силы сопротивления определяют методом обхода контура по точкам: находят натяжение в любой точке гибкого тягового контура, натяжение в набегающей и сбегающей ветвях контура у привода, а по ним —общее сопротивление и тяговое усилие привода.
Метод расчета обхода контура по точкам заключается в следующем: вычерчивают контур тягового органа и разбивают его на прямолинейные и криволинейные участки, нумеруя точки сопряжения этих участков (рис. 2.3, а). Нумерацию обычно начинают с точки сбегания тягового органа с приводного барабана, шкива или звездочки. Далее характерные точки нумеруют последовательно по ходу движения тягового органа.
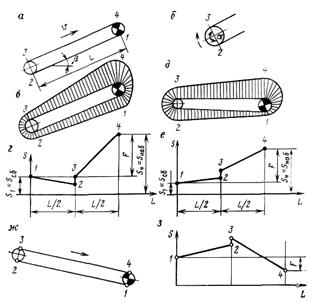
Рис. 2.3. Схемы к расчету сил сопротивления движению транспортных машин с гибким тяговым органом
Расчет начинают с точки 1, натяжение в которой равно S1. Натяжение тягового органа в каждой последующей по ходу его движения точке равно натяжению в предыдущей точке плюс сила сопротивления на участке между этими точками. Таким образом,

где L1-2 — длина участка тягового органа между расчетными точками, м; w0 — коэффициент основного сопротивления перемещению тягового органа по опорам; qт и qн— линейные массы соответственно тягового и грузонесущего органа и вращающихся частей стационарных поддерживающих роликоопор холостой, (нижней) ветви, кг/м.
Сопротивление перемещению тягового органа на криволинейных участках или отклоняющих барабанах определяется коэффициентом трения |я между тяговым органом и барабаном иуглом обхвата α(рис. 2.3, б):

где е — основание натурального логарифма; ky — коэффициент, характеризующий увеличение натяжения тягового органа на криволинейном участке. При α = 90÷180° для ленточного или канатного тягового органа ky= 1,02÷1,06, для цепного тягового органа ky= 1,05÷1,1.
При проведении дальнейшего расчета получим:

где q — масса транспортируемого груза, находящегося на 1 мдлины грузонесущего органа грузовой ветви, кг/м; qв — масса вращающихся частей стационарных роликоопор, приходящаяся на 1 м длины грузовой ветви, кг/м.
Суммарное сопротивление Wc (Н) итяговое усилие F (Н) на валу приводного барабана

По натяжениям, найденным в точках контура, можно построить эпюры натяжения тяговых органов на самом контуре (рис. 2.3, в, д) или диаграммы натяжений тягового органа (рис. 2.3, г, е). Для примера на рис. 2.3, д, е приведены эпюра и диаграмма натяжения тягового органа горизонтального конвейера, а на рис. 2.3, ж, з — бремсбергового конвейера, транспортирующего груз вниз.
Дата добавления: 2015-09-28; просмотров: 5515;