Опытное определение параметров схемы замещения асинхронной машины.
Расчёт характеристик асинхронной машины будет более достоверным, если в их основу положить параметры схемы замещения, определяемые опытным путём.
Активное сопротивление обмотки статора  легко измерить ввиду доступности выводов статора. Остальные параметры асинхронной машины могут быть определены на основе несложных опытов холостого хода и короткого замыкания.
легко измерить ввиду доступности выводов статора. Остальные параметры асинхронной машины могут быть определены на основе несложных опытов холостого хода и короткого замыкания.
Режим холостого хода двигателя – это режим его работы без нагрузки на валу. Скольжение ротора в этом случае близко к нулю (S=0). Развиваемый двигателем электромагнитный момент  преодолевает лишь моменты от сил трения и момент сопротивления вентилятора, обдувающего двигатель. По сравнению с номинальным моментом величина
преодолевает лишь моменты от сил трения и момент сопротивления вентилятора, обдувающего двигатель. По сравнению с номинальным моментом величина  очень мала (
очень мала (  ). Ток ротора в этом режиме тоже близок к нулю (I/2≈0). Мощность, потребляемая двигателем из сети Р10, переходит в потери: электрические в статорной обмотке Рэл1=m1 I02 R1; в стали статора Рст1 и механические Рмех:
). Ток ротора в этом режиме тоже близок к нулю (I/2≈0). Мощность, потребляемая двигателем из сети Р10, переходит в потери: электрические в статорной обмотке Рэл1=m1 I02 R1; в стали статора Рст1 и механические Рмех:
Р10 = Рэл1 + Рст1 + Рмех.
Если у трансформатора величина тока холостого хода составляет несколько процентов от номинального, то в асинхронном двигателе – несколько десятков процентов (до 70…80% у многополюсных двигателей небольшой мощности).
Режим холостого хода позволяет определить сумму индуктивных сопротивлений статорной обмотки и намагничивающего контура схемы замещения
а также активное сопротивление намагничивающего контура схемы замещения
В опыте холостой ход измеряют мощность, потребляемую двигателем Р10, ток обмотки статора I0 и напряжение U1, приложенное к ней. Последнее обычно меняют в пределах (0,4…1,2) U1н, если желательно определить параметры х.х. при различных насыщениях магнитной цепи двигателя.
При известном сопротивление R1 вычисляют мощность Рхх = Рст1+Рмех = Р10 – m1I02R1, а затем строят зависимость  (Рис. 3.11).
(Рис. 3.11).
Поскольку потери в стали пропорциональны квадрату индукции (или квадрату приложенного напряжения), а механические потери остаются при изменении напряжения постоянными, зависимость (Рст1+Рмех) = f(U12) очень близка к прямой. Продолжая на графике эту прямую до пересечения с осью ординат, определяем Рмех. Таким образом определяют суммарные потери в стали Рст1 и механические Рмех, при этом потери в стали могут быть вычислены при любом напряжении.
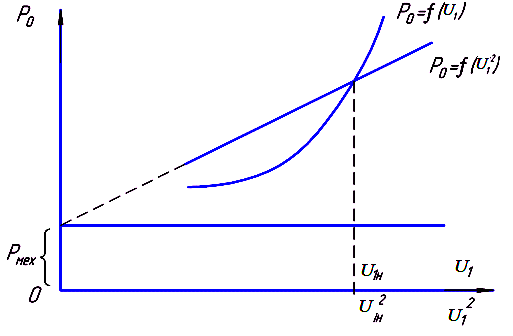
Рисунок 3.11 Зависимость потерь в стали и механических потерь от приложенного напряжения
Режим короткого замыкания асинхронного двигателя возникает в том случае когда ротор заторможен, S = 1. Опыт короткого замыкания проводят при пониженном значении подводимого напряжения U1, так чтобы ток статора I1k находился в пределах (0,25…1,25)I1н. По измеренным величинам напряжения U1, тока статора I1k и потребляемой мощности Р1к находят:
полное сопротивление короткого замыкания
активное сопротивление короткого замыкания
 ;
;
индуктивное сопротивление короткого замыкания
При измеренной величине R1 можно найти значение приведённого активного сопротивления обмотки ротора R21 = Rk - R1. Принимая в режиме опыта к.з.

 находят значение Х1 и Х2'.
находят значение Х1 и Х2'.
Из данных опытов холостой ход и короткое замыкание определяют значение индуктивного сопротивления контура намагничивания:
 .
.
На рисунке 3.12 показана зависимость I1k = f(U1).
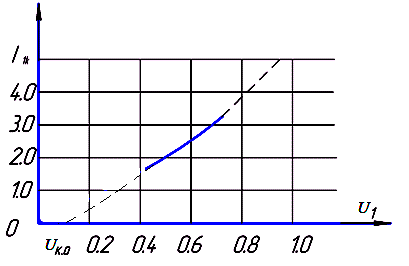
Рисунок 3.12 Зависимость тока статора в режиме короткого замыкания от приложенного напряжения
Эта зависимость, при токах I1k> I1н. Вогнутость начальной части кривой I1k = f(U1) объясняется уменьшением сопротивления Х1 и Х2' вследствие увеличения насыщение зубцовых слоёв возрастающими потоками рассеяния.
Величину тока короткого замыкания при номинальном напряжении, равную величине начального пускового тока двигателя I1кн=I1п определяют по выражению:
 ,
,
где  - ток короткого замыкания при наибольшем напряжении, достигнуто в опыте;
- ток короткого замыкания при наибольшем напряжении, достигнуто в опыте;
 - смотри рис 3.12.
- смотри рис 3.12.
Предполагая, что практически отношение токов короткого замыкая пропорционально напряжениям, мощность Р1к пересчитывают пропорционально квадрату напряжений:
Дата добавления: 2015-09-18; просмотров: 2890;