Определение рабочей плоскости
Методы графического выбора требуют установить способ перехода от трехмерного пространства модели к двумерному пространству экрана. Программа FEMAP использует определение рабочей плоскости {Workplane), как размещение двумерной зоны выбора в трехмерном пространстве. Рабочая плоскость - это плоскость, которую мы произвольно размещаем в трехмерном пространстве. С рабочей плоскостью связана система координат, следовательно, определено начало координат (Origin) и направление осей X и Y рабочей плоскости.
Выполнив последовательность команд Tools | Workplane, на экране появится диалоговое окно управления рабочей плоскостью, представленное на Рис. 1. Для того, чтобы разместить рабочую плоскость в пространстве модели нажимаем «Global Plane».
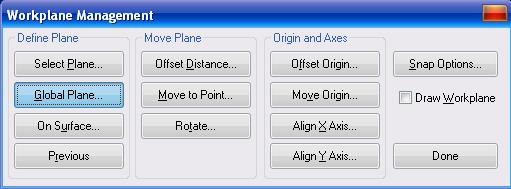
Рис.3. Управление рабочей плоскостью
Полагаем, что ось Z является направляющей, а 2D эскиз мы будем строить в осях XY. Выбираем «ZX Plane».
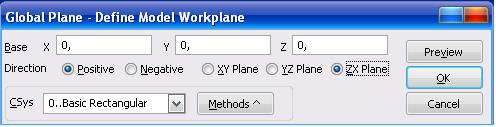
Рис.4. Выбор системы координат
Поворачиваем рабочую плоскость выбрав «ZX Front», выполнив последовательность команд View | Rotate.
Дата добавления: 2015-09-14; просмотров: 1060;