Структура гибких производственных систем
Структурой ГПСназывается сеть связей между ее элементами, которые могут рассматриваться как в статике (конфигурация и конструкция) так и в динамике (изменения во времени). Каждая ГПС представляет комплекс подсистем, показанных на рис. 7.31.
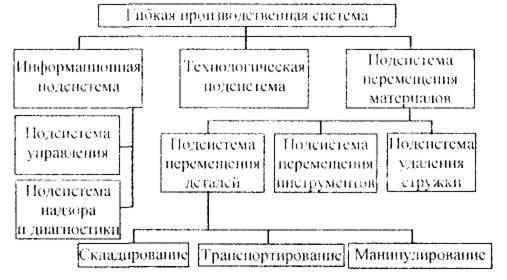
Рис. 7.3.1. Функциональные подсистемы ГПС
Взаимодействие функциональных подсистем ГПС показано на рис. 7.3.2.
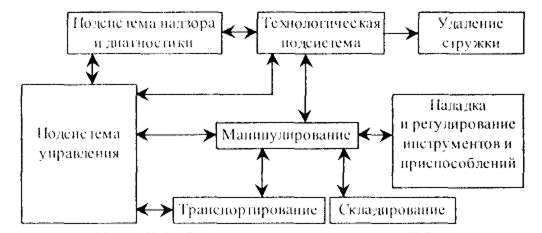
Рис. 7.3.2. Взаимодействие подсистем ГПС
Технологическая подсистема ГПС включает основные технологические устройства, использование которых определяется типом обрабатываемых деталей и технологией их обработки. К таким устройствам относятся машины и приспособления на соответствующих РМ, с помощью которых реализуются операции технологических процессов обработки, сборки, а также операции мойки, чистки и т.д.
Информационная подсистема на локальном уровне состоит из подсистемы управления и подсистемы надзора и диагностики. Она обеспечивает возможность функционирования ГПС без непосредственного участия оператора. Подсистема управления может содержать центральный (главный) компьютер и автономные подсистемы для управления работой каждой из составляющих подсистем. Подсистема надзора и диагностики обеспечивает проверку, как корректности работы машины, так и точности обработанных де талей.
Движение информации в ГПС имеет иерархическую структуру, в которой выделяются три уровня принятия решений (рис. 7.3.3.). В дальнейшем будет рассматриваться только низший (текущий) уровень.
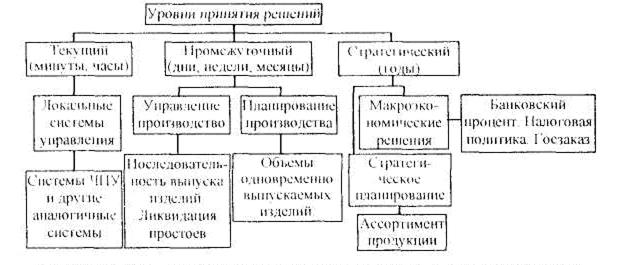
Рис. 7.3.3. Уровни принятия решения и управления предприятием
 Подсистема перемещения материалов включает технические средства обеспечивающие связи между элементами производственной подсистемы и управляет перемещениями инструментов, деталей и приспособлений для их закрепления. Эта подсистема обеспечивает складирование, транспортирование соответствующих элементов и манипулирование ими. Складирование заключается в хранении обрабатываемых изделий до и после обработки, а также в обеспечении требуемых перерывов в перемещения инструментов для нормальной работы технических устройств. Транспортирование служит для изменения местоположения (перемещения) соответствующих элементов. Манипулирование обеспечивает перемещение одновременной сменой ориентации, например перемещение детали в рабочую зону станка. Рассмотренные действия могут реализовываться независимо друг от друга либо быть объединены. Последнее перспективнее, и хотя требует разработки более сложной системы управления. Наиболее часто встречается объединение двух функций: транспортирования и манипулирования или транспортирования и складирования.
Подсистема перемещения материалов включает технические средства обеспечивающие связи между элементами производственной подсистемы и управляет перемещениями инструментов, деталей и приспособлений для их закрепления. Эта подсистема обеспечивает складирование, транспортирование соответствующих элементов и манипулирование ими. Складирование заключается в хранении обрабатываемых изделий до и после обработки, а также в обеспечении требуемых перерывов в перемещения инструментов для нормальной работы технических устройств. Транспортирование служит для изменения местоположения (перемещения) соответствующих элементов. Манипулирование обеспечивает перемещение одновременной сменой ориентации, например перемещение детали в рабочую зону станка. Рассмотренные действия могут реализовываться независимо друг от друга либо быть объединены. Последнее перспективнее, и хотя требует разработки более сложной системы управления. Наиболее часто встречается объединение двух функций: транспортирования и манипулирования или транспортирования и складирования.
Разделение ГПС на подсистемы касается производственных ячеек высокого уровня. На нулевом уровне практически все рассмотренные функции выполняет оператор, обслуживающий данное РМ.
Лекция 8. Организация и планирование комплексной подготовки производства и освоения новой продукции
Дата добавления: 2015-09-11; просмотров: 1808;