Тема 3 Понятие процесса и ядра
Цель: Изучить особенности системы управления процессами в операционной системе Linux.
План:
1 Работы и процессы.
2 Выполнение работ на переднем плане и в фоне.
3 Работа в фоне и ликвидация работ.
4 Остановка и возобновление работы.
1Работа в фоне и ликвидация работ
Управление процессами
Важнейшей частью операционной системы, непосредственно влияющей на функционирование вычислительной машины, является подсистема управления процессами. Процесс (или по-другому, задача) - абстракция, описывающая выполняющуюся программу. Для операционной системы процесс представляет собой единицу работы, заявку на потребление системных ресурсов. Подсистема управления процессами планирует выполнение процессов, то есть распределяет процессорное время между несколькими одновременно существующими в системе процессами, а также занимается созданием и уничтожением процессов, обеспечивает процессы необходимыми системными ресурсами, поддерживает взаимодействие между процессами.
Состояние процессов
В многозадачной (многопроцессной) системе процесс может находиться в одном из трех основных состояний:
ВЫПОЛНЕНИЕ - активное состояние процесса, во время которого процесс обладает всеми необходимыми ресурсами и непосредственно выполняется процессором;
ОЖИДАНИЕ - пассивное состояние процесса, процесс заблокирован, он не может выполняться по своим внутренним причинам, он ждет осуществления некоторого события, например, завершения операции ввода-вывода, получения сообщения от другого процесса, освобождения какого-либо необходимого ему ресурса;
ГОТОВНОСТЬ - также пассивное состояние процесса, но в этом случае процесс заблокирован в связи с внешними по отношению к нему обстоятельствами: процесс имеет все требуемые для него ресурсы, он готов выполняться, однако процессор занят выполнением другого процесса.
В ходе жизненного цикла каждый процесс переходит из одного состояния в другое в соответствии с алгоритмом планирования процессов, реализуемым в данной операционной системе. Типичный граф состояний процесса показан на рисунке 3.1.
В состоянии ВЫПОЛНЕНИЕ в однопроцессорной системе может находиться только один процесс, а в каждом из состояний ОЖИДАНИЕ и ГОТОВНОСТЬ - несколько процессов, эти процессы образуют очереди соответственно ожидающих и готовых процессов. Жизненный цикл процесса начинается с состояния ГОТОВНОСТЬ, когда процесс готов к выполнению и ждет своей очереди. При активизации процесс переходит в состояние ВЫПОЛНЕНИЕ и находится в нем до тех пор, пока либо он сам освободит процессор, перейдя в состояние ОЖИДАНИЯ какого-нибудь события, либо будет насильно "вытеснен" из процессора, например, вследствие исчерпания отведенного данному процессу кванта процессорного времени. В последнем случае процесс возвращается в состояние ГОТОВНОСТЬ. В это же состояние процесс переходит из состояния ОЖИДАНИЕ, после того, как ожидаемое событие произойдет.
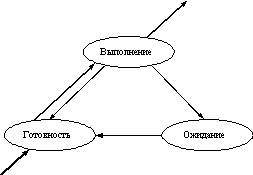
Рис. 3.1. Граф состояний процесса в многозадачной среде
Контекст и дескриптор процесса
На протяжении существования процесса его выполнение может быть многократно прервано и продолжено. Для того, чтобы возобновить выполнение процесса, необходимо восстановить состояние его операционной среды. Состояние операционной среды отображается состоянием регистров и программного счетчика, режимом работы процессора, указателями на открытые файлы, информацией о незавершенных операциях ввода-вывода, кодами ошибок выполняемых данным процессом системных вызовов и т.д. Эта информация называется контекстом процесса.
Кроме этого, операционной системе для реализации планирования процессов требуется дополнительная информация: идентификатор процесса, состояние процесса, данные о степени привилегированности процесса, место нахождения кодового сегмента и другая информация. В некоторых ОС (например, в ОС UNIX) информацию такого рода, используемую ОС для планирования процессов, называют дескриптором процесса.
Дескриптор процесса по сравнению с контекстом содержит более оперативную информацию, которая должна быть легко доступна подсистеме планирования процессов. Контекст процесса содержит менее актуальную информацию и используется операционной системой только после того, как принято решение о возобновлении прерванного процесса.
Очереди процессов представляют собой дескрипторы отдельных процессов, объединенные в списки. Таким образом, каждый дескриптор, кроме всего прочего, содержит по крайней мере один указатель на другой дескриптор, соседствующий с ним в очереди. Такая организация очередей позволяет легко их переупорядочивать, включать и исключать процессы, переводить процессы из одного состояния в другое.
Программный код только тогда начнет выполняться, когда для него операционной системой будет создан процесс. Создать процесс - это значит:
создать информационные структуры, описывающие данный процесс, то есть его дескриптор и контекст;
включить дескриптор нового процесса в очередь готовых процессов;
загрузить кодовый сегмент процесса в оперативную память или в область свопинга.
Алгоритмы планирования процессов
Планирование процессов включает в себя решение следующих задач:
определение момента времени для смены выполняемого процесса;
выбор процесса на выполнение из очереди готовых процессов;
переключение контекстов "старого" и "нового" процессов.
Первые две задачи решаются программными средствами, а последняя в значительной степени аппаратно (см. раздел 2.3. "Средства аппаратной поддержки управления памятью и многозадачной среды в микропроцессорах Intel 80386, 80486 и Pentium").
Существует множество различных алгоритмов планирования процессов, по разному решающих вышеперечисленные задачи, преследующих различные цели и обеспечивающих различное качество мультипрограммирования. Среди этого множества алгоритмов рассмотрим подробнее две группы наиболее часто встречающихся алгоритмов: алгоритмы, основанные на квантовании, и алгоритмы, основанные на приоритетах.
В соответствии с алгоритмами, основанными на квантовании, смена активного процесса происходит, если:
процесс завершился и покинул систему,
произошла ошибка,
процесс перешел в состояние ОЖИДАНИЕ,
исчерпан квант процессорного времени, отведенный данному процессу.
Процесс, который исчерпал свой квант, переводится в состояние ГОТОВНОСТЬ и ожидает, когда ему будет предоставлен новый квант процессорного времени, а на выполнение в соответствии с определенным правилом выбирается новый процесс из очереди готовых. Таким образом, ни один процесс не занимает процессор надолго, поэтому квантование широко используется в системах разделения времени. Граф состояний процесса, изображенный на рисунке 2.1, соответствует алгоритму планирования, основанному на квантовании.
Кванты, выделяемые процессам, могут быть одинаковыми для всех процессов или различными. Кванты, выделяемые одному процессу, могут быть фиксированной величины или изменяться в разные периоды жизни процесса. Процессы, которые не полностью использовали выделенный им квант (например, из-за ухода на выполнение операций ввода-вывода), могут получить или не получить компенсацию в виде привилегий при последующем обслуживании. По разному может быть организована очередь готовых процессов: циклически, по правилу "первый пришел - первый обслужился" (FIFO) или по правилу "последний пришел - первый обслужился" (LIFO).
Другая группа алгоритмов использует понятие "приоритет" процесса. Приоритет - это число, характеризующее степень привилегированности процесса при использовании ресурсов вычислительной машины, в частности, процессорного времени: чем выше приоритет, тем выше привилегии.
Приоритет может выражаться целыми или дробными, положительным или отрицательным значением.Чем выше привилегии процесса, тем меньше времени он будет проводить в очередях. Приоритет может назначаться директивно администратором системы в зависимости от важности работы или внесенной платы, либо вычисляться самой ОС по определенным правилам, он может оставаться фиксированным на протяжении всей жизни процесса либо изменяться во времени в соответствии с некоторым законом. В последнем случае приоритеты называются динамическими.
Существует две разновидности приоритетных алгоритмов: алгоритмы, использующие относительные приоритеты, и алгоритмы, использующие абсолютные приоритеты.
В обоих случаях выбор процесса на выполнение из очереди готовых осуществляется одинаково: выбирается процесс, имеющий наивысший приоритет. По разному решается проблема определения момента смены активного процесса. В системах с относительными приоритетами активный процесс выполняется до тех пор, пока он сам не покинет процессор, перейдя в состояние ОЖИДАНИЕ (или же произойдет ошибка, или процесс завершится). В системах с абсолютными приоритетами выполнение активного процесса прерывается еще при одном условии: если в очереди готовых процессов появился процесс, приоритет которого выше приоритета активного процесса. В этом случае прерванный процесс переходит в состояние готовности. На рисунке 2.2 показаны графы состояний процесса для алгоритмов с относительными (а) и абсолютными (б) приоритетами.
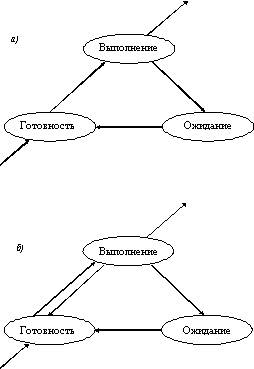
Рис. 3.2. Графы состояний процессов в системах
(а) с относительными приоритетами; (б)с абсолютными приоритетами
Во многих операционных системах алгоритмы планирования построены с использованием как квантования, так и приоритетов. Например, в основе планирования лежит квантование, но величина кванта и/или порядок выбора процесса из очереди готовых определяется приоритетами процессов.
Вытесняющие и невытесняющие алгоритмы планирования
Существует два основных типа процедур планирования процессов - вытесняющие (preemptive) и невытесняющие (non-preemptive).
Non-preemptive multitasking - невытесняющая многозадачность - это способ планирования процессов, при котором активный процесс выполняется до тех пор, пока он сам, по собственной инициативе, не отдаст управление планировщику операционной системы для того, чтобы тот выбрал из очереди другой, готовый к выполнению процесс.
Preemptive multitasking - вытесняющая многозадачность - это такой способ, при котором решение о переключении процессора с выполнения одного процесса на выполнение другого процесса принимается планировщиком операционной системы, а не самой активной задачей.
Понятия preemptive и non-preemptive иногда отождествляются с понятиями приоритетных и бесприоритетных дисциплин, что совершенно неверно, а также с понятиями абсолютных и относительных приоритетов, что неверно отчасти. Вытесняющая и невытесняющая многозадачность - это более широкие понятия, чем типы приоритетности. Приоритеты задач могут как использоваться, так и не использоваться и при вытесняющих, и при невытесняющих способах планирования. Так в случае использования приоритетов дисциплина относительных приоритетов может быть отнесена к классу систем с невытесняющей многозадачностью, а дисциплина абсолютных приоритетов - к классу систем с вытесняющей многозадачностью. А бесприоритетная дисциплина планирования, основанная на выделении равных квантов времени для всех задач, относится к вытесняющим алгоритмам.
Основным различием между preemptive и non-preemptive вариантами многозадачности является степень централизации механизма планирования задач. При вытесняющей многозадачности механизм планирования задач целиком сосредоточен в операционной системе, и программист пишет свое приложение, не заботясь о том, что оно будет выполняться параллельно с другими задачами. При этом операционная система выполняет следующие функции: определяет момент снятия с выполнения активной задачи, запоминает ее контекст, выбирает из очереди готовых задач следующую и запускает ее на выполнение, загружая ее контекст.
При невытесняющей многозадачности механизм планирования распределен между системой и прикладными программами. Прикладная программа, получив управление от операционной системы, сама определяет момент завершения своей очередной итерации и передает управление ОС с помощью какого-либо системного вызова, а ОС формирует очереди задач и выбирает в соответствии с некоторым алгоритмом (например, с учетом приоритетов) следующую задачу на выполнение. Такой механизм создает проблемы как для пользователей, так и для разработчиков.
Для пользователей это означает, что управление системой теряется на произвольный период времени, который определяется приложением (а не пользователем). Если приложение тратит слишком много времени на выполнение какой-либо работы, например, на форматирование диска, пользователь не может переключиться с этой задачи на другую задачу, например, на текстовый редактор, в то время как форматирование продолжалось бы в фоновом режиме. Эта ситуация нежелательна, так как пользователи обычно не хотят долго ждать, когда машина завершит свою задачу.
Поэтому разработчики приложений для non-preemptive операционной среды, возлагая на себя функции планировщика, должны создавать приложения так, чтобы они выполняли свои задачи небольшими частями. Например, программа форматирования может отформатировать одну дорожку дискеты и вернуть управление системе. После выполнения других задач система возвратит управление программе форматирования, чтобы та отформатировала следующую дорожку. Подобный метод разделения времени между задачами работает, но он существенно затрудняет разработку программ и предъявляет повышенные требования к квалификации программиста. Программист должен обеспечить "дружественное" отношение своей программы к другим выполняемым одновременно с ней программам, достаточно часто отдавая им управление. Крайним проявлением "недружественности" приложения является его зависание, которое приводит к общему краху системы. В системах с вытесняющей многозадачностью такие ситуации, как правило, исключены, так как центральный планирующий механизм снимет зависшую задачу с выполнения.
Однако распределение функций планировщика между системой и приложениями не всегда является недостатком, а при определенных условиях может быть и преимуществом, потому что дает возможность разработчику приложений самому проектировать алгоритм планирования, наиболее подходящий для данного фиксированного набора задач. Так как разработчик сам определяет в программе момент времени отдачи управления, то при этом исключаются нерациональные прерывания программ в "неудобные" для них моменты времени. Кроме того, легко разрешаются проблемы совместного использования данных: задача во время каждой итерации использует их монопольно и уверена, что на протяжении этого периода никто другой не изменит эти данные. Существенным преимуществом non-preemptive систем является более высокая скорость переключения с задачи на задачу.
Примером эффективного использования невытесняющей многозадачности является файл-сервер NetWare, в котором, в значительной степени благодаря этому, достигнута высокая скорость выполнения файловых операций. Менее удачным оказалось использование невытесняющей многозадачности в операционной среде Windows 3.х.
Однако почти во всех современных операционных системах, ориентированных на высокопроизводительное выполнение приложений (UNIX, Windows NT, OS/2, VAX/VMS), реализована вытесняющая многозадачность. В последнее время дошла очередь и до ОС класса настольных систем, например, OS/2 Warp и Windows 95. Возможно в связи с этим вытесняющую многозадачность часто называют истинной многозадачностью.
Средства синхронизации и взаимодействия процессов
Проблема синхронизации
Процессам часто нужно взаимодействовать друг с другом, например, один процесс может передавать данные другому процессу, или несколько процессов могут обрабатывать данные из общего файла. Во всех этих случаях возникает проблема синхронизации процессов, которая может решаться приостановкой и активизацией процессов, организацией очередей, блокированием и освобождением ресурсов.
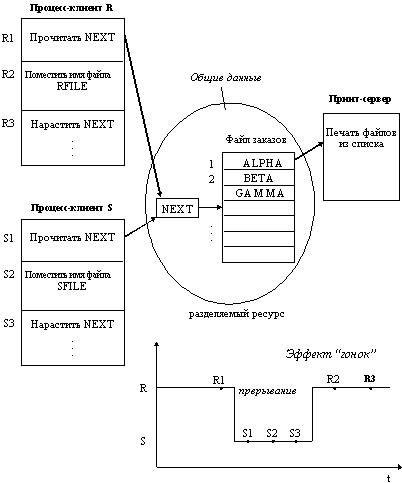
Рис. 3.3. Пример необходимости синхронизации
Пренебрежение вопросами синхронизации процессов, выполняющихся в режиме мультипрограммирования, может привести к их неправильной работе или даже к краху системы. Рассмотрим, например (рисунок 2.3), программу печати файлов (принт-сервер). Эта программа печатает по очереди все файлы, имена которых последовательно в порядке поступления записывают в специальный общедоступный файл "заказов" другие программы. Особая переменная NEXT, также доступная всем процессам-клиентам, содержит номер первой свободной для записи имени файла позиции файла "заказов". Процессы-клиенты читают эту переменную, записывают в соответствующую позицию файла "заказов" имя своего файла и наращивают значение NEXT на единицу. Предположим, что в некоторый момент процесс R решил распечатать свой файл, для этого он прочитал значение переменной NEXT, значение которой для определенности предположим равным 4. Процесс запомнил это значение, но поместить имя файла не успел, так как его выполнение было прервано (например, в следствие исчерпания кванта). Очередной процесс S, желающий распечатать файл, прочитал то же самое значение переменной NEXT, поместил в четвертую позицию имя своего файла и нарастил значение переменной на единицу. Когда в очередной раз управление будет передано процессу R, то он, продолжая свое выполнение, в полном соответствии со значением текущей свободной позиции, полученным во время предыдущей итерации, запишет имя файла также в позицию 4, поверх имени файла процесса S.
Таким образом, процесс S никогда не увидит свой файл распечатанным. Сложность проблемы синхронизации состоит в нерегулярности возникающих ситуаций: в предыдущем примере можно представить и другое развитие событий: были потеряны файлы нескольких процессов или, напротив, не был потерян ни один файл. В данном случае все определяется взаимными скоростями процессов и моментами их прерывания. Поэтому отладка взаимодействующих процессов является сложной задачей. Ситуации подобные той, когда два или более процессов обрабатывают разделяемые данные, и конечный результат зависит от соотношения скоростей процессов, называются гонками.
Критическая секция
Важным понятием синхронизации процессов является понятие "критическая секция" программы. Критическая секция - это часть программы, в которой осуществляется доступ к разделяемым данным. Чтобы исключить эффект гонок по отношению к некоторому ресурсу, необходимо обеспечить, чтобы в каждый момент в критической секции, связанной с этим ресурсом, находился максимум один процесс. Этот прием называют взаимным исключением.
Простейший способ обеспечить взаимное исключение - позволить процессу, находящемуся в критической секции, запрещать все прерывания. Однако этот способ непригоден, так как опасно доверять управление системой пользовательскому процессу; он может надолго занять процессор, а при крахе процесса в критической области крах потерпит вся система, потому что прерывания никогда не будут разрешены.
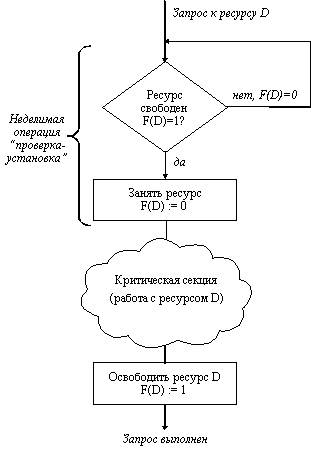
Рис. 3.4. Реализация критических секций с использованием блокирующих переменных
Другим способом является использование блокирующих переменных. С каждым разделяемым ресурсом связывается двоичная переменная, которая принимает значение 1, если ресурс свободен (то есть ни один процесс не находится в данный момент в критической секции, связанной с данным процессом), и значение 0, если ресурс занят. На рисунке 2.4 показан фрагмент алгоритма процесса, использующего для реализации взаимного исключения доступа к разделяемому ресурсу D блокирующую переменную F(D). Перед входом в критическую секцию процесс проверяет, свободен ли ресурс D. Если он занят, то проверка циклически повторяется, если свободен, то значение переменной F(D) устанавливается в 0, и процесс входит в критическую секцию. После того, как процесс выполнит все действия с разделяемым ресурсом D, значение переменной F(D) снова устанавливается равным 1.
Если все процессы написаны с использованием вышеописанных соглашений, то взаимное исключение гарантируется. Следует заметить, что операция проверки и установки блокирующей переменной должна быть неделимой. Поясним это. Пусть в результате проверки переменной процесс определил, что ресурс свободен, но сразу после этого, не успев установить переменную в 0, был прерван. За время его приостановки другой процесс занял ресурс, вошел в свою критическую секцию, но также был прерван, не завершив работы с разделяемым ресурсом. Когда управление было возвращено первому процессу, он, считая ресурс свободным, установил признак занятости и начал выполнять свою критическую секцию. Таким образом был нарушен принцип взаимного исключения, что потенциально может привести к нежелаемым последствиям. Во избежание таких ситуаций в системе команд машины желательно иметь единую команду "проверка-установка", или же реализовывать системными средствами соответствующие программные примитивы, которые бы запрещали прерывания на протяжении всей операции проверки и установки.
Реализация критических секций с использованием блокирующих переменных имеет существенный недостаток: в течение времени, когда один процесс находится в критической секции, другой процесс, которому требуется тот же ресурс, будет выполнять рутинные действия по опросу блокирующей переменной, бесполезно тратя процессорное время. Для устранения таких ситуаций может быть использован так называемый аппарат событий. С помощью этого средства могут решаться не только проблемы взаимного исключения, но и более общие задачи синхронизации процессов. В разных операционных системах аппарат событий реализуется по своему, но в любом случае используются системные функции аналогичного назначения, которые условно назовем WAIT(x) и POST(x), где x - идентификатор некоторого события. На рисунке 2.5 показан фрагмент алгоритма процесса, использующего эти функции. Если ресурс занят, то процесс не выполняет циклический опрос, а вызывает системную функцию WAIT(D), здесь D обозначает событие, заключающееся в освобождении ресурса D. Функция WAIT(D) переводит активный процесс в состояние ОЖИДАНИЕ и делает отметку в его дескрипторе о том, что процесс ожидает события D. Процесс, который в это время использует ресурс D, после выхода из критической секции выполняет системную функцию POST(D), в результате чего операционная система просматривает очередь ожидающих процессов и переводит процесс, ожидающий события D, в состояние ГОТОВНОСТЬ.
Обобщающее средство синхронизации процессов предложил Дейкстра, который ввел два новых примитива. В абстрактной форме эти примитивы, обозначаемые P и V, оперируют над целыми неотрицательными переменными, называемыми семафорами. Пусть S такой семафор. Операции определяются следующим образом:
V(S) : переменная S увеличивается на 1 одним неделимым действием; выборка, инкремент и запоминание не могут быть прерваны, и к S нет доступа другим процессам во время выполнения этой операции.
P(S) : уменьшение S на 1, если это возможно. Если S=0, то невозможно уменьшить S и остаться в области целых неотрицательных значений, в этом случае процесс, вызывающий P-операцию, ждет, пока это уменьшение станет возможным. Успешная проверка и уменьшение также является неделимой операцией.
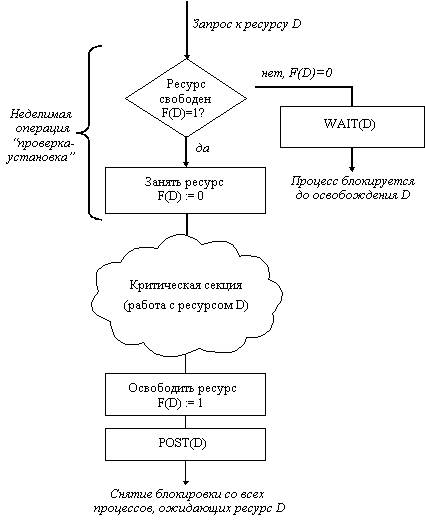
Рис. 3.5. Реализация критической секции с использованием системных
функций WAIT(D) и POST(D)
В частном случае, когда семафор S может принимать только значения 0 и 1, он превращается в блокирующую переменную. Операция P заключает в себе потенциальную возможность перехода процесса, который ее выполняет, в состояние ожидания, в то время как V-операция может при некоторых обстоятельствах активизировать другой процесс, приостановленный операцией P (сравните эти операции с системными функциями WAIT и POST).
Рассмотрим использование семафоров на классическом примере взаимодействия двух процессов, выполняющихся в режиме мультипрограммирования, один из которых пишет данные в буферный пул, а другой считывает их из буферного пула. Пусть буферный пул состоит из N буферов, каждый из которых может содержать одну запись. Процесс "писатель" должен приостанавливаться, когда все буфера оказываются занятыми, и активизироваться при освобождении хотя бы одного буфера. Напротив, процесс "читатель" приостанавливается, когда все буферы пусты, и активизируется при появлении хотя бы одной записи.
Введем два семафора: e - число пустых буферов и f - число заполненных буферов. Предположим, что запись в буфер и считывание из буфера являются критическими секциями (как в примере с принт-сервером в начале данного раздела). Введем также двоичный семафор b, используемый для обеспечения взаимного исключения. Тогда процессы могут быть описаны следующим образом:
// Глобальные переменные
#define N 256
int e = N, f = 0, b = 1;
void Writer ()
{
while(1)
{
PrepareNextRecord(); /* подготовка новой записи */
P(e); /* Уменьшить число свободных буферов, если они есть */
/* в противном случае - ждать, пока они освободятся */
P(b); /* Вход в критическую секцию */
AddToBuffer(); /* Добавить новую запись в буфер */
V(b); /* Выход из критической секции */
V(f); /* Увеличить число занятых буферов */
}
}
void Reader ()
{
while(1)
{
P(f); /* Уменьшить число занятых буферов, если они есть */
/* в противном случае ждать, пока они появятся */
P(b); /* Вход в критическую секцию */
GetFromBuffer(); /* Взять запись из буфера */
V(b); /* Выход из критической секции */
V(e); /* Увеличить число свободных буферов */
ProcessRecord(); /* Обработать запись */
}
}
Тупики
Приведенный выше пример поможет нам проиллюстрировать еще одну проблему синхронизации - взаимные блокировки, называемые также дедлоками (deadlocks), клинчами (clinch) или тупиками. Если переставить местами операции P(e) и P(b) в программе "писателе", то при некотором стечении обстоятельств эти два процесса могут взаимно заблокировать друг друга. Действительно, пусть "писатель" первым войдет в критическую секцию и обнаружит отсутствие свободных буферов; он начнет ждать, когда "читатель" возьмет очередную запись из буфера, но "читатель" не сможет этого сделать, так как для этого необходимо войти в критическую секцию, вход в которую заблокирован процессом "писателем".
Рассмотрим еще один пример тупика. Пусть двум процессам, выполняющимся в режиме мультипрограммирования, для выполнения их работы нужно два ресурса, например, принтер и диск. На рисунке 2.6,а показаны фрагменты соответствующих программ. И пусть после того, как процесс А занял принтер (установил блокирующую переменную), он был прерван. Управление получил процесс В, который сначала занял диск, но при выполнении следующей команды был заблокирован, так как принтер оказался уже занятым процессом А. Управление снова получил процесс А, который в соответствии со своей программой сделал попытку занять диск и был заблокирован: диск уже распределен процессу В. В таком положении процессы А и В могут находиться сколь угодно долго.
В зависимости от соотношения скоростей процессов, они могут либо совершенно независимо использовать разделяемые ресурсы (г), либо образовывать очереди к разделяемым ресурсам (в), либо взаимно блокировать друг друга (б). Тупиковые ситуации надо отличать от простых очередей, хотя и те и другие возникают при совместном использовании ресурсов и внешне выглядят похоже: процесс приостанавливается и ждет освобождения ресурса. Однако очередь - это нормальное явление, неотъемлемый признак высокого коэффициента использования ресурсов при случайном поступлении запросов. Она возникает тогда, когда ресурс недоступен в данный момент, но через некоторое время он освобождается, и процесс продолжает свое выполнение. Тупик же, что видно из его названия, является в некотором роде неразрешимой ситуацией.
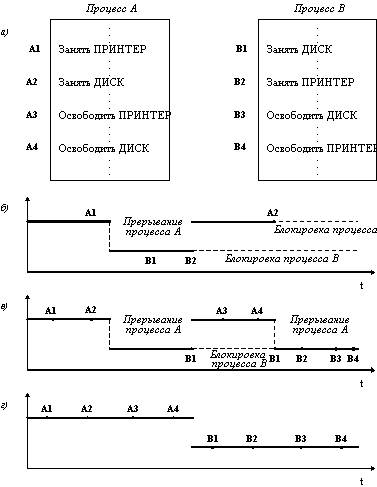
Рис. 3.6. (a) фрагменты программ А и В, разделяющих принтер и диск;
(б) взаимная блокировка (клинч);(в) очередь к разделяемому диску;
(г) независимое использование ресурсов
В рассмотренных примерах тупик был образован двумя процессами, но взаимно блокировать друг друга могут и большее число процессов.
Проблема тупиков включает в себя следующие задачи:
предотвращение тупиков,
распознавание тупиков,
восстановление системы после тупиков.
Тупики могут быть предотвращены на стадии написания программ, то есть программы должны быть написаны таким образом, чтобы тупик не мог возникнуть ни при каком соотношении взаимных скоростей процессов. Так, если бы в предыдущем примере процесс А и процесс В запрашивали ресурсы в одинаковой последовательности, то тупик был бы в принципе невозможен. Второй подход к предотвращению тупиков называется динамическим и заключается в использовании определенных правил при назначении ресурсов процессам, например, ресурсы могут выделяться в определенной последовательности, общей для всех процессов.
В некоторых случаях, когда тупиковая ситуация образована многими процессами, использующими много ресурсов, распознавание тупика является нетривиальной задачей. Существуют формальные, программно-реализованные методы распознавания тупиков, основанные на ведении таблиц распределения ресурсов и таблиц запросов к занятым ресурсам. Анализ этих таблиц позволяет обнаружить взаимные блокировки.
Если же тупиковая ситуация возникла, то не обязательно снимать с выполнения все заблокированные процессы. Можно снять только часть из них, при этом освобождаются ресурсы, ожидаемые остальными процессами, можно вернуть некоторые процессы в область свопинга, можно совершить "откат" некоторых процессов до так называемой контрольной точки, в которой запоминается вся информация, необходимая для восстановления выполнения программы с данного места. Контрольные точки расставляются в программе в местах, после которых возможно возникновение тупика.
Из всего вышесказанного ясно, что использовать семафоры нужно очень осторожно, так как одна незначительная ошибка может привести к останову системы. Для того, чтобы облегчить написание корректных программ, было предложено высокоуровневое средство синхронизации, называемое монитором. Монитор - это набор процедур, переменных и структур данных. Процессы могут вызывать процедуры монитора, но не имеют доступа к внутренним данным монитора. Мониторы имеют важное свойство, которое делает их полезными для достижения взаимного исключения: только один процесс может быть активным по отношению к монитору. Компилятор обрабатывает вызовы процедур монитора особым образом. Обычно, когда процесс вызывает процедуру монитора, то первые несколько инструкций этой процедуры проверяют, не активен ли какой-либо другой процесс по отношению к этому монитору. Если да, то вызывающий процесс приостанавливается, пока другой процесс не освободит монитор. Таким образом, исключение входа нескольких процессов в монитор реализуется не программистом, а компилятором, что делает ошибки менее вероятными.
В распределенных системах, состоящих из нескольких процессоров, каждый из которых имеет собственную оперативную память, семафоры и мониторы оказываются непригодными. В таких системах синхронизация может быть реализована только с помощью обмена сообщениями. Подробнее об этом смотрите в разделе "Синхронизация в распределенных системах".
Нити
Многозадачность является важнейшим свойством ОС. Для поддержки этого свойства ОС определяет и оформляет для себя те внутренние единицы работы, между которыми и будет разделяться процессор и другие ресурсы компьютера. Эти внутренние единицы работы в разных ОС носят разные названия - задача, задание, процесс, нить. В некоторых случаях сущности, обозначаемые этими понятиями, принципиально отличаются друг от друга.
Говоря о процессах, мы отмечали, что операционная система поддерживает их обособленность: у каждого процесса имеется свое виртуальное адресное пространство, каждому процессу назначаются свои ресурсы - файлы, окна, семафоры и т.д. Такая обособленность нужна для того, чтобы защитить один процесс от другого, поскольку они, совместно используя все ресурсы машины, конкурируют с друг другом. В общем случае процессы принадлежат разным пользователям, разделяющим один компьютер, и ОС берет на себя роль арбитра в спорах процессов за ресурсы.
При мультипрограммировании повышается пропускная способность системы, но отдельный процесс никогда не может быть выполнен быстрее, чем если бы он выполнялся в однопрограммном режиме (всякое разделение ресурсов замедляет работу одного из участников за счет дополнительных затрат времени на ожидание освобождения ресурса). Однако задача, решаемая в рамках одного процесса, может обладать внутренним параллелизмом, который в принципе позволяет ускорить ее решение. Например, в ходе выполнения задачи происходит обращение к внешнему устройству, и на время этой операции можно не блокировать полностью выполнение процесса, а продолжить вычисления по другой "ветви" процесса.
Для этих целей современные ОС предлагают использовать сравнительно новый механизм многонитевой обработки (multithreading). При этом вводится новое понятие "нить" (thread), а понятие "процесс" в значительной степени меняет смысл.
Мультипрограммирование теперь реализуется на уровне нитей, и задача, оформленная в виде нескольких нитей в рамках одного процесса, может быть выполнена быстрее за счет псевдопараллельного (или параллельного в мультипроцессорной системе) выполнения ее отдельных частей. Например, если электронная таблица была разработана с учетом возможностей многонитевой обработки, то пользователь может запросить пересчет своего рабочего листа и одновременно продолжать заполнять таблицу. Особенно эффективно можно использовать многонитевость для выполнения распределенных приложений, например, многонитевый сервер может параллельно выполнять запросы сразу нескольких клиентов.
Нити, относящиеся к одному процессу, не настолько изолированы друг от друга, как процессы в традиционной многозадачной системе, между ними легко организовать тесное взаимодействие. Действительно, в отличие от процессов, которые принадлежат разным, вообще говоря, конкурирующим приложениям, все нити одного процесса всегда принадлежат одному приложению, поэтому программист, пишущий это приложение, может заранее продумать работу множества нитей процесса таким образом, чтобы они могли взаимодействовать, а не бороться за ресурсы.
В традиционных ОС понятие "нить" тождественно понятию "процесс". В действительности часто бывает желательно иметь несколько нитей, разделяющих единое адресное пространство, но выполняющихся квазипараллельно, благодаря чему нити становятся подобными процессам (за исключением разделяемого адресного пространства).
Нити иногда называют облегченными процессами или мини-процессами. Действительно, нити во многих отношениях подобны процессам. Каждая нить выполняется строго последовательно и имеет свой собственный программный счетчик и стек. Нити, как и процессы, могут, например, порождать нити-потомки, могут переходить из состояния в состояние. Подобно традиционным процессам (то есть процессам, состоящим из одной нити), нити могут находится в одном из следующих состояний: ВЫПОЛНЕНИЕ, ОЖИДАНИЕ и ГОТОВНОСТЬ. Пока одна нить заблокирована, другая нить того же процесса может выполняться. Нити разделяют процессор так, как это делают процессы, в соответствии с различными вариантами планирования.
Однако различные нити в рамках одного процесса не настолько независимы, как отдельные процессы. Все такие нити имеют одно и то же адресное пространство. Это означает, что они разделяют одни и те же глобальные переменные. Поскольку каждая нить может иметь доступ к каждому виртуальному адресу, одна нить может использовать стек другой нити. Между нитями нет полной защиты, потому что, во-первых, это невозможно, а во-вторых, не нужно. Все нити одного процесса всегда решают общую задачу одного пользователя, и аппарат нитей используется здесь для более быстрого решения задачи путем ее распараллеливания. При этом программисту очень важно получить в свое распоряжения удобные средства организации взаимодействия частей одной задачи. Кроме разделения адресного пространства, все нити разделяют также набор открытых файлов, таймеров, сигналов и т.п.
Итак, нити имеют собственные:
программный счетчик,
стек,
регистры,
нити-потомки,
состояние.
Нити разделяют:
адресное пространство,
глобальные переменные,
открытые файлы,
таймеры,
семафоры,
статистическую информацию.
Многонитевая обработка повышает эффективность работы системы по сравнению с многозадачной обработкой. Например, в многозадачной среде Windows можно одновременно работать с электронной таблицей и текстовым редактором. Однако, если пользователь запрашивает пересчет своего рабочего листа, электронная таблица блокируется до тех пор, пока эта операция не завершится, что может потребовать значительного времени. В многонитевой среде в случае, если электронная таблица была разработана с учетом возможностей многонитевой обработки, предоставляемых программисту, этой проблемы не возникает, и пользователь всегда имеет доступ к электронной таблице.
Широкое применение находит многонитевая обработка в распределенных системах. Смотрите об этом в разделе "Процессы и нити в распределенных системах".
Некоторые прикладные задачи легче программировать, используя параллелизм, например задачи типа "писатель-читатель", в которых одна нить выполняет запись в буфер, а другая считывает записи из него. Поскольку они разделяют общий буфер, не стоит их делать отдельными процессами. Другой пример использования нитей - это управление сигналами, такими как прерывание с клавиатуры (del или break). Вместо обработки сигнала прерывания, одна нить назначается для постоянного ожидания поступления сигналов. Таким образом, использование нитей может сократить необходимость в прерываниях пользовательского уровня. В этих примерах не столь важно параллельное выполнение, сколь важна ясность программы.
Наконец, в мультипроцессорных системах для нитей из одного адресного пространства имеется возможность выполняться параллельно на разных процессорах. Это действительно один из главных путей реализации разделения ресурсов в таких системах. С другой стороны, правильно сконструированные программы, которые используют нити, должны работать одинаково хорошо как на однопроцессорной машине в режиме разделения времени между нитями, так и на настоящем мультипроцессоре.Управление работами (job control) это возможность, которую предоставляют многие оболочки, включая (Bash и Tcsh). Управление работами позволяет управлять множеством команд или работ одновременно.
Каждый раз, когда вы выполняете программу, вы начинаете то, что известно, как процесс. Процесс - это название для выполняемой программы. Команда ps выдает перечень имеющих место в данный момент процессов. Пример:
/home/student$ ps
PID TT STAT TIME COMMAND
24 3 S 0:03 (bash)
161 3 R 0:00 ps
/home/student$
PID (Process IDentificator) – идентификаторы процессов - это неповторяющиеся числа приписанные всем идущим процессам, перечисленные в первой колонке.
Последний столбец (COMMAND) дает имя выполняемой команды. Здесь мы видим только процессы, которые инициировал student..
В выведенном перечне указаны bash (это оболочка, используемая student-ом) и сама команда ps.
Выполняемый процесс известен shell как работа. Термины процесс и работа взаимозаменяемы.
2Выполнение работ на переднем плане и в фоне
Работы могут выполняться как на переднем плане, так и в фоне. На переднем плане в каждый момент может быть только одна работа. С другой стороны, фоновые работы не получают информации с терминала, в общем случае они тихо выполняются, не испытывая потребности в общении с пользователем.
Работы могут быть также отложены. Отложенная работа - это работа, которая в данный момент не выполняется и временно остановлена. После остановки работу можно продолжить как на переднем плане, так и на фоне, причем возобновление не изменит ее состояния.
При прерывании работы (клавиши прерывания, обычно это ctrl-C) вы убиваете процесс насовсем. Если работа убита, то она запускается сначала, используя прежнюю команду.
3Работа в фоне и ликвидация работ
Чтобы переместить процесс в фоновый режим, необходимо после команды добавить символ "&". Например:
/home/student$ yes > /dev/null & [1]164 – переведет выполнение команды yes в фоновый режим. В данном случае, "1" – представляет номер работы, а "164" -идентификатор процесса (PID); это номер, присвоенный системой работе. Любой из этих номеров можно использовать при обращении к работе.
Чтобы проверить состояние процесса в фоновом режиме используется команда jobs.
Для завершения работы используется команда kill. Эта команда может брать в качестве аргумента как номер работы, так и идентификатор процесса. Синтаксис: kill <PID> или kill %<номер_работы>
4 Остановка и возобновление работы
Есть другой способ перевести работу в фоновый режим. Вы можете начать работу нормально (в режиме переднего плана), остановить работу и продолжить в фоновом режиме. Для приостановки работы надо нажать Ctrl-Z.
Для возобновления работы в режиме переднего плана используйте команду fg ("foreground" - передний план).
Для возобновления работы в фоновом режиме используйте команду bg ("background" -задний план, фоновый режим). Эффект будет аналогичен тому, как если бы вы набрали после команды "&".
Существует большая разница между фоновой работой и остановленной. Остановленная работа не выполняется и не использует время процессора, но занимает память. Работа в фоновом режиме и выполняется, и занимает память. Команды fg и bg обычно переводят на передний план или в фоновый режим работы, которые были остановлены последними. Если вы выполняете много работ одновременно, вы можете перевести на передний план или в фоновый режим конкретную работу заданием номера работы в качестве аргумента команд fg или bg, но нельзя использовать идентификаторы процессов.
Литература: О – 1. 2. 3. 5
Контрольные вопросы:
1. Дайте определение термину «Процесс»?
2. Дайте определение термину «Отложенная работа»?
3. Дайте определение термину «Прерванная работа»?
4. В каких режимах могут выполняться работы?
5. Что такое PID?
Дата добавления: 2015-09-11; просмотров: 1956;