Для уяснения возможности применения уравнений Лагранжа при составлении динамических уравнений СИ рассмотрим пример.
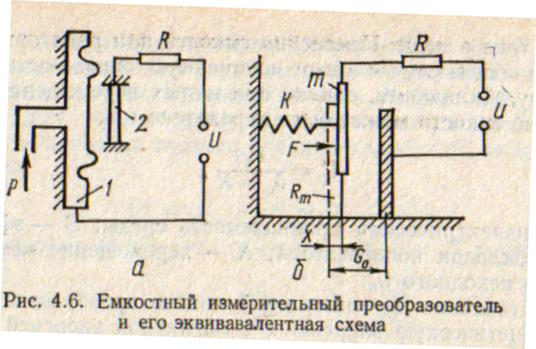
Емкостный измерительный преобразователь (рис. 4.6, а) давления р состоит из конденсатора, образованного неподвижной обкладкой 2 и мембраной R, подключенного через сопротивление к источнику напряжения и. Схематическое изображение основных элементов емкостных преобразователей показано на рис. 4.6, б. Необходимо учесть два эффекта: механический и электрический. Механическое перемещение мембраны эквивалентно перемещению массы m под действием силы F, ограниченному упругой силой пружины (мембраны) k. Демпфирующее действие объема воздуха между мембраной и неподвижной обкладкой учитывается коэффициентом демпфирования  . Перемещение мембраны приводит к изменению емкости и тока в цепи. Изменения емкости или реактивного сопротивления в обіцем случае имеют нелинейную зависимость от расстояния между обкладками, однако при малых перемещениях мембраны значение емкости
. Перемещение мембраны приводит к изменению емкости и тока в цепи. Изменения емкости или реактивного сопротивления в обіцем случае имеют нелинейную зависимость от расстояния между обкладками, однако при малых перемещениях мембраны значение емкости  может быть определено как
может быть определено как
где  — диэлектрическая проницаемость среды; S — эффективная площадь обкладок конденсатора; X — перемещение мембраны относительно исходной координаты
— диэлектрическая проницаемость среды; S — эффективная площадь обкладок конденсатора; X — перемещение мембраны относительно исходной координаты  .
.
Для составления математической модели преобразователя отождествим кинетическую энергию Т с магнитной энергией  , а потенциальную П — с электрической
, а потенциальную П — с электрической  .
.
Обобщенные координаты при этом будут: перемещение  и заряд
и заряд  , а обобщенные скорости —
, а обобщенные скорости —  и ток
и ток  . Обобщенные силы: сила
. Обобщенные силы: сила  , создаваемая давлением
, создаваемая давлением  , подаваемым в мембранную коробку, и
, подаваемым в мембранную коробку, и  – напряжение, поданное на схему.
– напряжение, поданное на схему.
В общем случае силовые функции, входящие в уравнения Лагранжа (4.61), необходимо определять путем интегрирования по уравнениям (4.52), (4.55) и (4.39). Для линейного преобразователя силовые функции могут быть определены как квадратичные функции координат и скоростей.
Кинетическая энергия равна механической (магнитная равна нулю):
 .
.
Потенциальная энергия состоит из запасенных энергий пружины и конденсатора:
или с учетом выражения для емкости:
Функция рассеяния:

Применив уравнения Лагранжа (4.61) для обобщенных координат X и  ,
,
 (4.61)
(4.61)
получим два уравнения:
 ,
,
которые при подстановке соответствующих обобщенных координат и обобщенных сил примут вид:
 (4.61,а)
(4.61,а)
 (4.61,б)
(4.61,б)
Рассмотрим члены, входящие в уравнения (4.61,а), (4.61,б).
 ;
;  ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;  ;
;  .
.
Подставляя полученные выражения в (4.61,а), (4.61,б) имеем:

Заряд Q и перемещение X удобно представить как
где Х0 — установившееся значение перемещения при F = 0, но при подключенном источнике напряжения;  — перемещение мембраны относительно установившегося значения X (рис. 4.6, б).
— перемещение мембраны относительно установившегося значения X (рис. 4.6, б).
При малых перемещениях и изменениях q в сравнении с Х0 и Q0, когда величинами второго порядка малости q2, qх и т. д. можно пренебречь,

тогда уравнения (4.62) с учетом значений Q и X примут вид
С учетом условий равновесия, определяемого для Q0 и Х0, (при  )
)
окончательно можно записать динамические уравнения преобразователя:
 (4.63)
(4.63)
Дифференциальные уравнения (4.63) полностью описывают динамические процессы в емкостном преобразователе. Аналогичным образом можно получить уравнения, например, электромагнитных, индуктивных, индукционных и других преобразователей или же СИ в целом.
Порядок получения уравнений для любой измерительной цепи при этом следующий:
- выбирают систему обобщенных переменных и определяют внешние силы за счет источников;
- определяют кинетическую и потенциальную энергии цепи в целом ;
-определяют силы, связанные с рассеянием, и записывают функцию Рэлея;
- подставляют выражения энергий и функций Рэлея в уравнения Лагранжа и, выполняя дифференцирование по каждой обобщенной координате и скорости, получают п динамических уравнений.
В случае сложной измерительной цепи возникает целый ряд трудностей: выбор независимых обобщенных координат; отождествление энергий; определение количества обобщенных координат; определение и преобразование силовых функций и др.
Дата добавления: 2015-11-18; просмотров: 1197;