Измерительные цепи уравновешивающего преобразования.
Измерительные цепи уравновешивающего преобразования делятся на цепи со статическим, астатическим и развертывающим уравновешиванием.
На рис 3.14 приведена обобщенная схема измерительной цепи статического уравновешивания [2], в которой можно выделить две основные цепи: прямого преобразования К (аналогично схеме рис. 3.13) и обратной связи, представленной обратным преобразователем ОП. При этом соединение звеньев является комбинированным, хотя основная часть — схема с параллельным встречным соединением.
Как следует из схемы, выходной сигнал формируется в прямой цепи К, состоящей из преобразователя неравновесия ПН, модулятора М, усилителя Ус и демодулятора ДМ. На вход преобразователя неравновесия поступает сигнал  , равный разности между выходными сигналами Fx первичного преобразователя и Foc обратной связи, то есть
, равный разности между выходными сигналами Fx первичного преобразователя и Foc обратной связи, то есть
Следовательно, выходной сигнал у является функцией сигнала неравновесия , а не входного сигнала х или Fx:
 . (3.17)
. (3.17)
Обратный преобразователь предназначен, во-первых, для формирования сигнала, однородного с измеряемой величиной или выходным сигналом ПП, во-вторых,— для уравновешивания или компенсации этого сигнала. Как следует из (3.17), сигнал неравновесия в цепях статического уравновешивания должен быть отличным от нуля при  .
.
На основании (3.16) и (3.17) чувствительность измерительной цепи уравновешивания
 (3.18)
(3.18)
где S — чувствительность прямой цепи К;  — чувствительность цепи обратной связи.
— чувствительность цепи обратной связи.
Для линейных измерительных цепей можно записать


где К — коэффициент преобразования прямой цепи;  — коэффициент преобразования цепи обратной связи;
— коэффициент преобразования цепи обратной связи;  — глубина уравновешивания;
— глубина уравновешивания;  — относительное неравновесие;
— относительное неравновесие;  — глубина уравновешивания (относительная).
— глубина уравновешивания (относительная).
Тогда чувствительность измерительной цепи уравновешивания определяется как
 (3.19)
(3.19)
Следовательно, чувствительность приборов с измерительными цепями статического уравновешивания в  раз меньше в сравнении с цепями прямого преобразования. Однако они имеют достаточно широкий диапазон измерения, хорошее быстродействие, а погрешность в сравнении с цепями прямого преобразования уменьшается в
раз меньше в сравнении с цепями прямого преобразования. Однако они имеют достаточно широкий диапазон измерения, хорошее быстродействие, а погрешность в сравнении с цепями прямого преобразования уменьшается в  раз [4].
раз [4].
Для определения передаточной функции прибора статического уравновешивания измерительную цепь разобьем на участки, содержащие схему соединения с обратной связью, первичный преобразователь и указатель. После определения на основании (3.15) передаточной функции участка с обратной связью получим последовательное соединение первичного преобразователя, эквивалентного звена и указателя. Тогда на основании (3.12) передаточная функция прибора
где  и
и  — передаточные функции первичного преобразователя и указателя;
— передаточные функции первичного преобразователя и указателя;  и
и  — передаточные функции прямой цепи К и цепи обратной связи.
— передаточные функции прямой цепи К и цепи обратной связи.
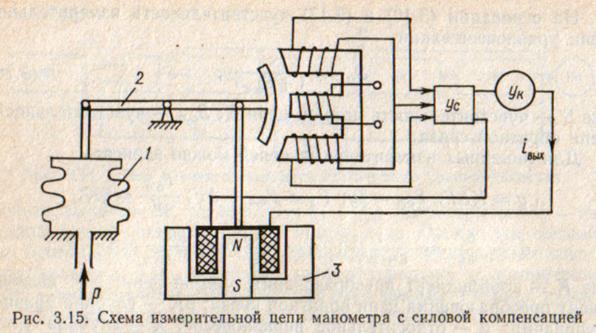
Примером приборов статического уравновешивания могут быть приборы, в которых реализуется силовая компенсация. На рис. 3.15 приведена схема измерительной цепи манометра со статическим уравновешиванием. Давление р вызывает деформацию сильфона 1, под действием которой рычаг 2 отклонится от состояния равновесия. Отклонение в трансформаторном преобразователе преобразуется в электрический сигнал, который после усиления и выпрямления в усилителе Ус поступает на указатель Ук и обмотки магнитоэлектрического преобразователя 3, связанного с рычагом 2. Магнитоэлектрический преобразователь в результате взаимодействия тока  в обмотках с полем постоянного магнита создает силу, уравновешивающую силу, развиваемую сильфоном, и, таким образом, препятствует перемещению рычага. При этом чем больше измеряемое давление, тем больше ток 1вых и развиваемое усилие. Таким образом, с точностью до статической погрешности рычаг будет удерживаться в среднем положении, а ток в обмотках преобразователя и показания прибора будут пропорциональны измеряемому давлению.
в обмотках с полем постоянного магнита создает силу, уравновешивающую силу, развиваемую сильфоном, и, таким образом, препятствует перемещению рычага. При этом чем больше измеряемое давление, тем больше ток 1вых и развиваемое усилие. Таким образом, с точностью до статической погрешности рычаг будет удерживаться в среднем положении, а ток в обмотках преобразователя и показания прибора будут пропорциональны измеряемому давлению.
Отличительной особенностью измерительных цепей астатического уравновешивания (рис. 3.16) является наличие в прямой цепи интегрирующего устройства ИУ. При этом в статическом режиме (х = const) без учета погрешностей достигается полное уравновешивание, то есть  или
или  .
.
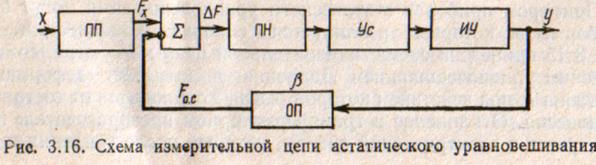
В качестве ИУ обычно используются электродвигатели, обладающие достаточной мощностью для цепей регистрации информации, регулирования, управления и др. Возможно использование и других ИУ, интегрирующих цепей, интегрирующих усилителей, счетчиков дискретных величин и др. При этом ИУ в измерительной цепи можно трактовать как элемент памяти. Действительно, если в качестве ИУ используется электродвигатель, то при обработке рассогласования его ось повернется на угол  , пропорциональный х. Но как только наступит равновесие
, пропорциональный х. Но как только наступит равновесие  , двигатель становится, а состояние равновесия останется (запомнится) до тех пор, пока не изменятся или
, двигатель становится, а состояние равновесия останется (запомнится) до тех пор, пока не изменятся или  .
.
Определение передаточной функции прибора с астатическим уравновешиванием может быть выполнено аналогично случаю статического уравновешивания. При этом, согласно рис. 3.16, в прямой цепи дополнительно включено интегрирующее устройство, выходной сигнал которого непосредственно является выходной величиной у. Тогда передаточная функция примет вид

где , — передаточные функции первичного преобразователя и цепи обратной связи; ,  — передаточные функции интегрирующего устройства и прямой цепи К.
— передаточные функции интегрирующего устройства и прямой цепи К.
Статическая характеристика измерительной цепи без учета погрешностей определяется из условия при х = const:
.
Так как  то
то
 (3.22)
(3.22)
где  — коэффициенты преобразования первичного преобразователя и цепи обратной связи.
— коэффициенты преобразования первичного преобразователя и цепи обратной связи.
На основании статической характеристики чувствительность прибора
 (3.23)
(3.23)
где  — чувствительность первичного преобразователя и цепи обратной связи.
— чувствительность первичного преобразователя и цепи обратной связи.
Чувствительность прибора может быть определена также из передаточной функции. Если положить, что  , то
, то
В статическом режиме х = const или р = О
Примером прибора с астатическим уравновешиванием является манометр (рис. 3.17). В качестве интегрирующего устройства, как видно из рисунка, используется двигатель М, который работает до тех пор, пока есть рассогласование между сигналами индуктивных датчиков 1 и 2. Якорь датчика 1 перемещается в результате деформации манометрической коробки, воспринимающей давление р. Якорь датчика 2 перемещается при повороте кулачка 3, находящегося на одной оси с двигателем. Угол поворота оси двигателя также является и выходным сигналом, который регистрирует указатель. В качестве устройств сравнения сигналов Fox, и Fx (см. рис. 3.16) могут использоваться делители тока и напряжения, мостовые схемы, механические рычаги, дифференциалы, дифференциальные схемы, как это имеет место для манометра (рис. 3.17), и др.
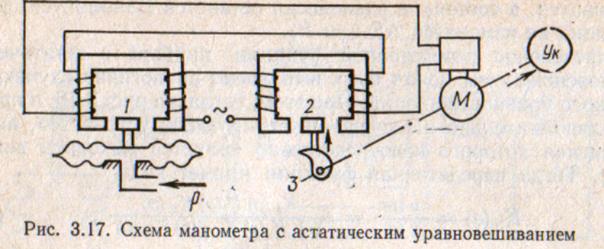
Основными достоинствами измерительных цепей астатического уравновешивания являются возможность прямого отсчета показаний по сигналу ИУ и значительная выходная мощность, например на валу двигателя, достаточная для записи сигнала в любом регистрирующем устройстве или системе.
К основным недостаткам относятся: малый диапазон измерений, малое быстродействие (в случае использования двигателя), возможность появления автоколебаний и потери устойчивости при увеличении глубины астатического уравновешивания. Для устранения автоколебаний используются цепи развертывающего уравновешивания.
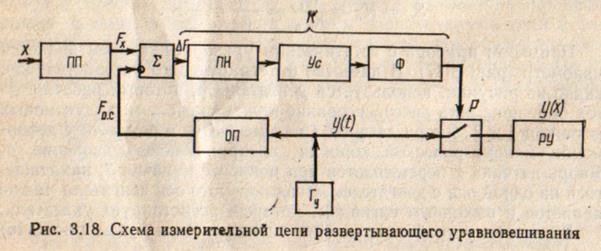
Отличительной особенностью аналоговых приборов развертывающего уравновешивания [4, 12], или динамической компенсации, являются периодический характер уравновешивания и дискретность представления результата измерения. На рис. 3.18 представлена структурная схема измерительной цепи развертывающего уравновешивания, которая состоит из первичного преобразователя ПП, прямой цепи К, обратного преобразователя ОП, генератора выходного сигнала Гу, реле (ключа) Р и регистрирующего устройства РУ.
Генератор, которым может быть двигатель, за один период (цикл) измерения по определенной программе формирует все возможные значения у(t)• Этот сигнал поступает на реле, а также через обратный преобразователь на устройство сравнения. Сигнал рассогласования поступает в прямую цепь, где преобразователь неравновесия ПН, усилитель Ус и формирователь Ф вырабатывают сигнал для замыкания реле только в момент времени, когда  или Следовательно, прямая цепь выполняет в данном случае функции нуль-органа, а не формирования сигнала, пропорционального , как это имело место в измерительных цепях статического или астатического уравновешивания. При этом значение сигнала у (х) регистрируется дискретно — один раз за период.
или Следовательно, прямая цепь выполняет в данном случае функции нуль-органа, а не формирования сигнала, пропорционального , как это имело место в измерительных цепях статического или астатического уравновешивания. При этом значение сигнала у (х) регистрируется дискретно — один раз за период.
В приборах развертывающего уравновешивания, ввиду отсутствия замкнутой цепи, исключена возможность возникновения автоколебаний, их параметры не ограничиваются условиями обеспечения устойчивости.
Дата добавления: 2015-11-18; просмотров: 2246;