Измерительные информационные системы на основе процессорных средств
Проблемы компьютеризации измерительных средств стали активно обсуждаться в начале 1980-х гг. Это было обусловлено общими тенденциями в развитии вычислительной техники, темпами ее освоения в измерительной практике, достижениями в разработке процессорных средств и их технических приложений.
Включение процессора в состав измерительной цепи позволило возложить на программную часть измерительного средства реализацию сложных измерительных преобразований, обеспечивающих выполнение косвенных, совокупных и совместных измерений, статистических измерений, измерений с коррекцией и адаптивных измерений. На этом этапе развитие измерительного математического обеспечения шло в направлении формализованного описания измерительных процедур, обеспечивающего возможность формирования программной части измерительного средства.
Совершенствование принципов построения измерительных средств и, в первую очередь, использование модульного подхода к синтезу как аппаратной, так и программной частей процессорных измерительных систем (ПрИС), привело к созданию средств измерений с открытыми функциональными возможностями, варьируемыми за счет трансформации состава Прис. Эта особенность ПрИС в совокупности с усложнением реализуемых алгоритмов измерений потребовала формирования адекватных методов метрологического анализа результатов и средств измерений с широким использованием расчетов и имитационного моделирования, выполняемых универсальными или специализированными вычислительными устройствами.
Возможность проведения метрологического анализа определяется, помимо всего прочего, наличием соответствующего математического обеспечения – математических моделей объектов, условий, процедур, средств измерений, алгоритмов оценивания характеристик погрешностей результатов измерений и метрологических характеристик средств измерений. В том случае, когда метрологический анализ выполняется с помощью встроенных в ПрИС средств, включая вычислительную часть, осуществляется автосопровождение измерений, в рамках которого могут выполняться не только необходимые расчеты, но и имитационный метрологический эксперимент, выполняемый с помощью образцовых средств, мер, калибраторов и т.п.
Второй этап компьютеризации измерений предполагает модульный принцип построения ПрИС и охват измерительным математическим обеспечением метрологического анализа.
Третий этап связан с приданием ПрИС возможности целенаправленного выбора рационального алгоритма измерений в фиксированной ситуации, определяемой видом измеряемой величины, свойствами объекта, требованиями, предъявляемыми к процедуре и средствам измерений, и наложенными ограничениями.
В настоящее время сформировалось новое направление в ИИС и метрологии – компьютерно-измерительные системы (КИС). Компьютерно-измерительная система обязательно включает в себя микропроцессор или компьютер, работающий в режиме реального времени, или в режиме on-line.
В последние годы персональные компьютеры используются не только как вычислительные средства, но и как универсальные измерительные приборы. Компьютерно-измерительные системы на основе персонального компьютера заменяют стандартные измерительные приборы (вольтметры, осциллографы, анализаторы спектра, генераторы и пр.) системой виртуальных приборов. При этом несколько таких приборов могут быть активизированы (воспроизведены) на одном персональном компьютере одновременно.
К отличительным особенностям и основным преимуществам компьютерно-измерительных систем по сравнению с микропроцессорными приборами относятся:
- обширный фонд стандартных прикладных компьютерных программ, доступных для оператора, позволяющий решать широкий круг прикладных задач измерений (исследование и обработка сигналов, сбор данных с датчиков, управление различными промышленными установками и т.д.);
- возможность оперативной передачи данных исследований и измерений по локальным и глобальным компьютерным сетям (например, сети Internet);
- высокоразвитый графический интерфейс пользователя, обеспечивающий быстрое освоение взаимодействия с системой;
- возможность использования внутренней и внешней памяти большого объема;
- возможность составления компьютерных программ для решения конкретных измерительных задач;
- возможность оперативного использования различных устройств документирования результатов измерений.
В самом общем случае КИС может быть построена двумя способами: на основе последовательной или параллельной архитектуры.
В КИС с последовательной архитектурой (ее иногда называют централизованной системой) части системы, преобразующие анализируемые сигналы, обрабатывают их в последовательном режиме, поэтому вся соответствующая электроника размещается на слотах компьютера. Достоинства такой архитектуры построения КИС очевидны: благодаря использованию принципа разделения обработки по времени стоимость системы невелика.
В КИС с параллельной архитектурой содержится ряд параллельных каналов измерения, каждый из которых имеет собственные узлы преобразования анализируемых сигналов, и только процессор компьютера работает в режиме мультиплексирования (т.е. объединения сигналов). Подобный принцип построения КИС позволяет проводить оптимизацию обработки сигналов в каждом канале независимо. В такой системе преобразование сигналов можно выполнять локально, т.е. в месте расположения источника исследуемого сигнала, что позволяет передавать сигналы от измеряемого объекта в цифровой форме.
На рис. 5.39 показана обобщенная структурная схема компьютерно-измерительной системы, отражающая как последовательную, так и параллельную архитектуры построения.
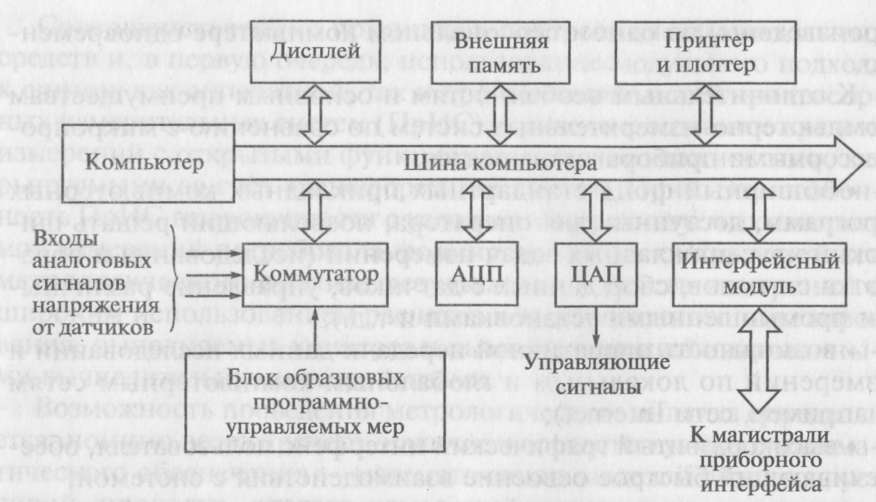
Рис. 5.39. Обобщенная структурная схема компьютерно-измерительной системы
Взаимодействие между отдельными элементами КИС осуществляется с по-мощью внутренней шины персонального компьютера, к которой подключены как его внешние устройства (дисплей, внешняя память, принтер, плоттер), так и измерительная схема, состоящая из коммутатора, АЦП и блока образцовых программно-управляемых мер напряжения и частоты. С помощью ЦАП можно вырабатывать управляющие аналоговые сигналы. Интерфейсный модуль подключает измерительный прибор к магистрали приборного интерфейса, коммутатор устройства обеспечивает подачу аналоговых сигналов напряжения с внешних датчиков на узлы системы.
Достаточно простые узлы КИС можно разместить на одной плате персонального компьютера. Существуют КИС и с более сложной структурой, в которых в соответствии с решаемой измерительной задачей по установленной программе коммутируются необходимые измерительные элементы, т.е. меняется архитектура построения системы.
Одним из элементов КИС является блок образцовых программно-управляемых мер (напряжения, частоты и др.). В качестве встроенных образцовых мер напряжения в КИС чаще всего применяются стабилитроны, температурный коэффициент напряжения которых составляет около 2,5×10–5. Наиболее эффективным способом стабилизации опорного напряжения является термостатирование блока стабилитронов. Термостат поддерживает температуру элементов около 30 °С со стабильностью не менее 0,1 °С. Недостатком такого способа являются достаточно длительный прогрев термостата (до 30 мин), а также большие скачки температуры при включении термостата. Температурные перепады ускоряют процесс старения стабилитронов, а следовательно, снижают их долговременную стабильность.
В настоящее время в КИС имеется возможность учитывать температурную нестабильность элементов программными методами. Для этого в блок стабилитронов вводят датчик температуры и экспериментально определяют зависимость опорного напряжения от температуры. Температура стабилитронов измеряется автоматически, и по указанной зависимости вводится поправка к величине образцового напряжения.
Аналогично учитывают нестабильность частоты кварцевого генератора, который служит мерой частоты. Сигналы с датчика температуры воздействуют на варикап, подстраивающий генератор на номинальную частоту. Нестабильность частоты кварцевого генератора может быть снижена до 10'7. Кварцевый генератор можно использовать в качестве задающего, если в системе необходим синтезатор частоты с дискретной сеткой частот.
В последних разработках КИС предусмотрена возможность определения индивидуальных функций влияния температуры на различные параметры виртуального прибора: дрейф нуля усили- , теля постоянного тока (УПТ), сопротивление переключателей, коэффициенты передачи различных структурных элементов. Непрерывный контроль температуры блоков позволяет автоматически корректировать возникающие погрешности измерения.
Дата добавления: 2015-10-22; просмотров: 3114;