Электромагнитный момент и механические характеристики асинхронного двигателя
Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М пропорционален электромагнитной мощности:
М = Рэм /ω1 (13.11)
где
ω1 = 2 π n1 /60 = 2π f1 (13.12)
- угловая синхронная скорость вращения.
Подставив в (13.11) значение электромагнитной мощности по (13.5), получим
М = Рэ2/ (ω1 s) = m1 I ′ 22 r′2 /(ω1 s) (13.13)
т. е. электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке ротора.
Если значение тока ротора по выражению (12.25) подставить в (13.13), то получим формулу электромагнитного момента асинхронной машины (Н  м):
м):
М =  (13.14)
(13.14)
Параметры схемы замещения асинхронной машины r1, r '2 , х1 и х'2 , входящие в выражение (13.14), являются постоянными, так как их значения при изменениях нагрузки машины остается практически неизменными. Также постоянными можно считать напряжение на обмотке фазы статора U1 и частоту f1. В выражении момента M единственная переменная величина — скольжение s, которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от + ∞ до - ∞ (см. рис. 10.1).
Рассмотрим зависимость момента от скольжения M = f (s) при U1 = const, f1 = const и постоянных параметрах схемы замещения. Эту зависимость принято называть механической характеристикой асинхронной машины. Анализ выражения (13.14), представляющего собой аналитическое выражение механической характеристики M = f (s), показывает, что при значениях скольжения s = 0 и s = ∞ электромагнитный момент М = 0. Из этого следует, что механическая характеристика M = f (s) имеет максимум.
Для определения величины критического скольжения sкр, соответствующего максимальному моменту, необходимо взять первую производную от (13.14) и приравнять ее нулю: dM /ds = 0. В результате
sкр = ± r/2 /  (13.15)
(13.15)
Подставив значение критического скольжения (по 13.15) в выражение электромагнитного момента (13.14), после ряда преобразований получим выражение максимального момента (Н м):
Mmax = ±  (13.16)
(13.16)
В (13.15) и (13.16) знак плюс соответствует двигательному, а знак минус — генераторному режиму работы асинхронной машины.
Для асинхронных машин общего назначения активное сопротивление обмотки статора r1 намного меньше суммы индуктивных сопротивлений: r1 << (x1 +х'2). Поэтому, пренебрегая величиной r1, получим упрощенные выражения критического скольжения
Sкр ≈ ± r/2 /(x1 +x/2) (13.17)
и максимального момента (Н м)
Mmax = ±  (13.18)
(13.18)
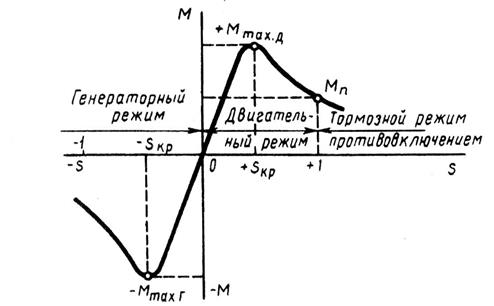
Рис. 13.2. Зависимость режимов работы
асинхронной машины от скольжения
Анализ выражения (13.16) показывает, что максимальный момент асинхронной машины в генераторном режиме больше, чем в двигательном (Mmax г > Мmах д). На рис. 13.2 показана механическая характеристика асинхронной машины М = f (s) при U1 = const. На этой характеристике указаны зоны, соответствующие различным режимам работы: двигательный режим (0 < s ≤ 1), когда электромагнитный момент М является вращающим; генераторный режим ( - ∞ < s < 0) и тормозной режим противовключением (1 < s < + ∞), когда электромагнитный момент М является тормозящим.
Из (13.14) следует, что электромагнитный момент асинхронного двигателя пропорционален квадрату напряжения сети:
M ≡ U12. Это в значительной степени отражается на эксплуатационных свойствах двигателя: даже небольшое снижение напряжения сети вызывает заметное уменьшение вращающего момента асинхронного двигателя. Например, при уменьшении напряжения
на 10% относительно номинального (U1 = 0,9Uном) электромагнитный момент двигателя уменьшается на 19% : M/ =0,92 M, где М— момент при номинальном напряжении сети, а М/ — момент при пониженном напряжении.
Для анализа работы асинхронного двигателя удобнее воспользоваться механической характеристикой M = f (s), представленной на рис. 13.3. При включении двигателя в сеть магнитное поле статора, не обладая инерцией, сразу же начинает вращение с синхронной частотой n1, в то же время ротор двигателя под влиянием сил инерции в начальный момент пуска остается неподвижным (n2 = 0) и скольжение s = 1.
Подставив в (13.14) скольжение s = 1, получим выражение пускового момента асинхронного двигателя (Н м):
Мп =  (13.19)
(13.19)
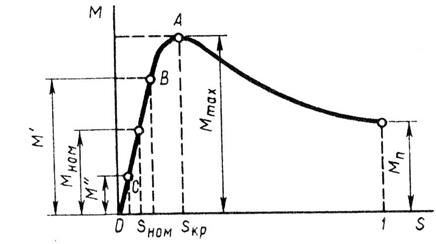
Рис 13.3. Зависимость электромагнитного момента
асинхронного двигателя от скольжения
Под действием этого момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой М = f (s). При критическом скольжении sкр момент достигает максимального значения Мmах. С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент М начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х.х. M0 и полезного нагрузочного момента (момента на валу двигателя) М2, т. е.
М = М0 + M2 = Mст (13.20)
Следует иметь в виду, что при скольжениях, близких к единице (пусковой режим двигателя), параметры схемы замещения асинхронного двигателя заметно изменяют свои значения. Объясняется это в основном двумя факторами: усилением магнитного насыщения зубцовых слоев статора и ротора, что ведет к уменьшению индуктивных сопротивлений рассеяния x1 и х'2, и эффектом вытеснения тока в стержнях ротора, что ведет к увеличению активного сопротивления обмотки ротора r/2. Поэтому параметры схемы замещения асинхронного двигателя, используемые при расчете электромагнитного момента по (13.14), (13.16) и (13.18), не мoгyт быть использованы для расчета пускового момента по (13.19).
Статический момент Мст равен сумме противодействующих моментов при равномерном вращении ротора (n2 = const). Допустим, что противодействующий момент на валу двигателя М2 соответствует номинальной нагрузке двигателя. В этом случае устано вившийся режим работы двигателя определится точкой на механической характеристике с координатами М = Мном и s = sном, где Мном и shom — номинальные значения электромагнитного момента и скольжения.
Из анализа механической характеристики также следует, что устойчивая работа асинхронного двигателя возможна при скольжениях меньше критического (s < sкр), т. е. на участке ОА механической характеристики. Дело в том, что именно на этом участке изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента. Так, если двигатель работал в номинальном рехиме (Мном; shom), то имело место равенство моментов: Мном = M0 + М/2. Если произошло увеличение нагрузочного момента M2 до значения М'2, то равенство моментов нарушится, т. е. Мном < М0 + М'2, и частота вращения ротора начнет убывать (скольжение будет увеличиваться). Это приведет к росту электромагнитного момента до значения M' = М0 + М'2 (точка B), после чего режим работы двигателя вновь станет установившимся. Если же при работе двигателя в номинальном режиме произойдет уменьшение нагрузочного момента до значения М"2 то равенство моментов вновь нарушится, по теперь вращающий момент окажется больше суммы противодествующих: Мном > М0 + М″2 . Частота вращения ротора начнет возрастать (скольжение будет уменьшаться), и это приведет к уменьшению электромагнитного момента М до значения М" = М0 + М″2 (точка С); устойчивый режим работы будет вновь восстановлен, но уже при других значениях М и s.
Работа асинхронного двигателя становится неустойчивой при скольжениях s ≥ sкр. Так, если электромагнитный момент двигателя М = Мmах, а скольжение s = sкp, то даже незначительное увеличение нагрузочного момента М2, вызвав увеличение скольжения s,
приведет к уменьшению электромагнитного момента М. За этим
ледует дальнейшее увеличение скольжения и т. д., пока скольжение не достигнет значения s = 1, т. е. пока ротор двигателя не остановится.
Таким образом, при достижении электромагнитным моментом максимального значения наступает предел устойчивой работы асинхронного двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов
действующих на ротор, была меньше максимального момента Мст = (М0 + М2) < Мmах. Но чтобы работа асинхронного двигателя была надежной и чтобы случайные кратковременные нагрузки не вызывали остановок двигателя, необходимо, чтобы он
обладал перегрузочной способностью. Перегрузочная способность двигателя λ определяется отношением максимального момента Мmax к номинальному Мном. Для асинхронных двигателей общего назначения перегрузочная способность составляет λ = Mmax /Mном = 1,7 ÷ 2,5.
Следует также обратить внимание на то, что работа двигателя при скольжении s < sкр т. е. на рабочем участке механической характеристики, является наиболее экономичной, так как она соответствует малым значениям скольжения, а следовательно, и меньшим значениям электрических потерь в обмотке ротора Рэ2 = s Pэм.
Пример 13.2. Рассчитать данные и построить механическую характеристику М  = f (s) трехфазного асинхронного двигателя с короткозамкнутым ротором типа 4А160М4УЗ номинальной мощностью 18,5 кВт, напряжением 220/380 В, частотой вращения 1465 об/мин. Параметры схемы замещения этого двигателя: r1 = 0,263 Ом, x1 = 0,521 Ом, r/2 = 0,158 Ом, х/2 = 0,892 Ом. Перегрузочная способность двигателя λ = 2,3, кратность пускового момента Мп /Мном = 1,0.
= f (s) трехфазного асинхронного двигателя с короткозамкнутым ротором типа 4А160М4УЗ номинальной мощностью 18,5 кВт, напряжением 220/380 В, частотой вращения 1465 об/мин. Параметры схемы замещения этого двигателя: r1 = 0,263 Ом, x1 = 0,521 Ом, r/2 = 0,158 Ом, х/2 = 0,892 Ом. Перегрузочная способность двигателя λ = 2,3, кратность пускового момента Мп /Мном = 1,0.
Решение. Для получения данных, необходимых для построения механической характеристики двигателя, определяем номинальный электромагнитный Мном пусковой Мп и максимальный Мmax моменты, а также два промежуточных значения момента при скольжениях s > sкр.
Номинальное скольжение по (10.1) sном = (1500 - 1465)/ 1500 = 0,023 .
Номинальный электромагнитный момент по (13.14)
Мном =  =121 Н м
=121 Н м
Пусковой момент двигателя Мп = Мном = 121 Н м.
Максимальный момент двигателя Мmax = λМном = 2,3 121 = 278 Н м.
Критическое скольжение по (13.17) sкр = 0,158/ (0,521 + 0,892) = 0,112 .
Электромагнитные моменты при скольжениях s = 0,2, s = 0,4 и s = 0,7 по (13.14):
M0,2 =  = 236 Н м
= 236 Н м
M0,4 =  = 150 Н м
= 150 Н м
M0,7 =  = 93,6 Н м
= 93,6 Н м
Результаты вычислений
| S | 0,023 | 0,112 | 0,20 | 0,4 | 0,7 | 1,0 | |
| M, Н м
| 93,6 | ||||||
| М =М/ Mmax
| 0,44 | 1,0 | 0,85 | 0,54 | 0,34 | 0,44 |
Механическая характеристика M = f (s), построенная по этим данным, приведена на рис 13.4.
Применение формулы (13.14) для расчета механических характеристик асинхронных двигателей не всегда возможно, так как параметры схемы замещения двигателей обычно не приводятся в каталогах и справочниках, поэтому для практических расчетов обычно пользуются упрощенной формулой момента. В основу этой формулы положено допущение, что активное сопротивление обмотки статора асинхронного двигателя r1 = 0, при этом
M = Mmax  (13.21)
(13.21)
Критическое скольжение определяют по формуле
sкр = sном (λ +  ) (13.22)
) (13.22)
Расчет механической характеристики намного упрощается, если его вести в относительных единицах M = M/ Mном. В этом случае уравнение механической характеристики имеет вид
M = (13.23)
Пример 13.3. Рассчитать механическую характеристику трехфазного асинхронного двигателя типа 4А160М4УЗ (18,5 кВт, 1465 об/мин, λ = 2,3, Mп/ Mном = 1,0) в относительных единицах M = f (s) по упрощенной формуле (13.23) и полученные результаты сравнить с данными, рассчитанными в примере 13.2.
Решение. Критическое скольжение по (13.22)
sкр = 0,023 (2,3 +  ) = 0,100 . Относительное значение момента M при скольжениях:
) = 0,100 . Относительное значение момента M при скольжениях:
sном = 0,023 ; sкp = 0,100;
s = 0,2; s = 0,4 s = 0,7
M ном =  = 0,46;
= 0,46;
M =  =1;
=1;
M 0,2 =  = 0,80;
= 0,80;
M 0,4 =  = 0,47;
= 0,47;
M 0,7 =  =0,28;
=0,28;
Результаты расчета
| S | 0,023 | 0,1 | 0,2 | 0,4 | 0,7 |
| М
| 0,046 | 1,0 | 0,80 | 0,47 | 0,28 |
| Ошибка,% по сравнению с расчетом примера 13.2 | -4,3 | — | +5,9 | -6,8 | +16,6 |
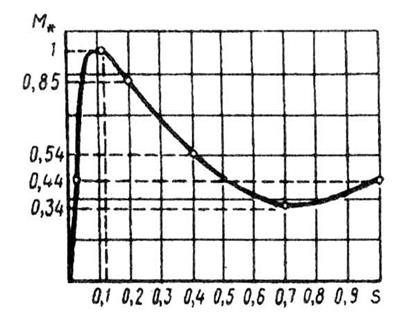
Рис. 13.4. Механическая характеристика
асинхронного двигателя типа 4А160М4УЗ
Применение упрощенной формулы (13.23) наиболее целесообразно при расчете рабочего участка механической характеристики и при скольжениях s < sкр,так как в этом случае величина ошибки не превышает значений, допустимых для технических
расчетов. При скольжениях s > sкрошибка может достигать 15—17%. Это
подтверждается расчетами примера 13.3.
Дата добавления: 2015-11-18; просмотров: 2934;