ГЛАВА4. ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Модель абсолютно твердого тела
Всякое реальное тело под действием приложенных к нему сил в большей или меньшей степени деформируется, то есть изменяет свои размеры и форму. В механике вводится модель абсолютно твердого тела, которое ни при каких условиях не может деформироваться и при всех условиях расстояние между двумя точками этого тела остается постоянным.
 Любое движение твердого тела можно представить как комбинацию поступательного и вращательного движений. Поступательное движение - это движение, при котором любая прямая, жестко связанная с движущимся телом, остается параллельной своему первоначальному положению. Вращательное движение - это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
Любое движение твердого тела можно представить как комбинацию поступательного и вращательного движений. Поступательное движение - это движение, при котором любая прямая, жестко связанная с движущимся телом, остается параллельной своему первоначальному положению. Вращательное движение - это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
Момент силы
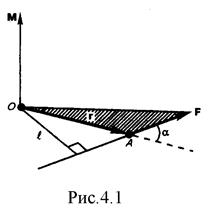
 Моментом силы F относительно неподвижной точкиО называется физическая величина, определяемая векторным произведением радиуса-вектора
Моментом силы F относительно неподвижной точкиО называется физическая величина, определяемая векторным произведением радиуса-вектора  , проведенного из точки О в точку А приложения силы, на силу
, проведенного из точки О в точку А приложения силы, на силу  (рис.4.1):
(рис.4.1):
 .
.
Здесь  - аксиальный вектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от к .
- аксиальный вектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от к .
Модуль момента силы
М = Fr sin ά = Fl, (4.1)
где ά- угол между и ; r sin ά = l - кратчайшее расстояние между линией действия силы и точкой О - плечо силы(ОА').
Моментом силы относительно неподвижной оси z называется скалярная величина Мz, равная проекции на эту ось вектора момента силы, определенного относительно произвольной точки О данной оси z (рис.4.2). Значение момента Мz не зависит от выбора положения точки О на оси z.
Если ось z совпадает с направлением вектора , то момент силы представляется в виде вектора, совпадающего с осью:
Мz=  .
.
Аксиальные векторы не связаны с определенной линией действия, их можно перемещать в пространстве параллельно самим себе (свободные векторы).
Если на тело, которое может вращаться вокруг какой-либо точки, действует одновременно несколько сил, то для сложения моментов этих сил следует воспользоваться правилом сложения моментов: результирующий момент силы равен геометрической сумме составляющих моментов сил.
Пара сил
Если на тело действует несколько сил, равнодействующая которых равна нулю, а результирующий момент относительно какой-либо оси не равен нулю, то тело не останется в равновесии. Так будет, например, если на тело действуют две равные и противоположные силы, не лежащие на одной прямой.
 Такие две силы, совместно действующие на тело, называют парой сил. Если тело закреплено на оси, то при действии на него пары сил оно начнет вращаться вокруг этой оси. При этом, вообще говоря, со стороны оси на тело будет действовать сила. Можно показать, однако, что если ось проходит через центр масс тела, то сила со стороны оси отсутствует.
Такие две силы, совместно действующие на тело, называют парой сил. Если тело закреплено на оси, то при действии на него пары сил оно начнет вращаться вокруг этой оси. При этом, вообще говоря, со стороны оси на тело будет действовать сила. Можно показать, однако, что если ось проходит через центр масс тела, то сила со стороны оси отсутствует.
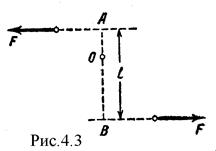
Момент пары сил одинаков относительно любой оси, перпендикулярной к плоскости пары. Действительно, пусть О - произвольная ось, перпендикулярная к плоскости, в которой лежит пара (рис.4.3). Суммарный момент М равен
M = F·OA + F·OB = F(OA + OB) = F·l,
где l - расстояние между силами, составляющими пару. Этот же результат получится и при любом другом положении оси. Можно показать также, что момент нескольких сил, равнодействующая которых равна нулю, будет один и тот же относительно всех осей, параллельных друг другу, и поэтому действие всех этих сил на тело можно заменить действием одной пары сил с тем же моментом.
Силы, действующие на твердое тело, могут вызвать как поступательное, так и вращательное движение тела. Чтобы тело находилось в равновесии, необходимо выполнение следующих условий:
- равнодействующая всех действующих на тело сил равна нулю.
- сумма всех моментов сил равна нулю.
Если силы лежат в одной плоскости, получаем следующие условия равновесия:
 ; (4.2)
; (4.2)
 . (4.3)
. (4.3)
Простые машины
Простые машины служат для того, чтобы изменять величину или направление приложенных сил при неизменной затрате работы. Эти машины не могут изменить величину работы. Если уменьшается приложенная сила, то должно увеличиться перемещение. В силу вступает «золотое правило механики»: то, что удается выиграть в силе, приходится 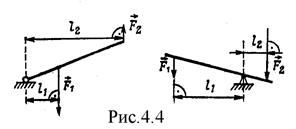 проигрывать в перемещении.
проигрывать в перемещении.
Рычагом называется твердое тело, вращающееся вокруг некоторой оси. У одноплечного рычага ось расположена на одном из концов и силы, действующие на него, антипараллельны. У двуплечного рычага ось расположена между точками приложения сил и силы параллельны (рис.4.4).
Если F1 - сила, уравновешивающая нагрузку, F2 - нагрузка, l1 - плечо силы, равное расстоянию по перпендикуляру от точки опоры до линии действия силы F1, l2 - плечо нагрузки, равное расстоянию по перпендикуляру от точки опоры до линии действия нагрузки F2, то, согласно правилу рычага,
F1 l1 = F2 l2 . (4.4)
 Неподвижный блок действует аналогично равноплечному рычагу (рис.4.5). Моменты сил, действующие с обеих сторон блока, одинаковы, соответственно одинаковы и силы, создающие эти моменты. У неподвижного блока сила равна нагрузке
Неподвижный блок действует аналогично равноплечному рычагу (рис.4.5). Моменты сил, действующие с обеих сторон блока, одинаковы, соответственно одинаковы и силы, создающие эти моменты. У неподвижного блока сила равна нагрузке 
F1 = F2 ,
то есть неподвижный блок изменяет только направление действия силы.
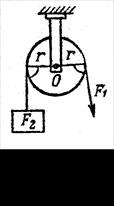
Подвижный блок действует аналогично одноплечному рычагу. Относительно центра вращения О действуют моменты сил, которые при равновесии должны быть равны:
F1 2r = F2 r.
Отсюда
F1 = F2/2 ,
то есть сила равна половине нагрузки. Подвижный блок изменяет только величину силы.
Момент инерции
При изучении вращения твердого тела пользуются понятием момента инерции. Моментом инерции системы (тела) относительно оси вращения называется физическая величина, равная сумме произведений масс n материальных точек системы на квадраты их расстояний до рассматриваемой оси:
 . (4.5)
. (4.5)
В случае непрерывного распределения масс эта сумма сводится к интегралу
 , (4.6)
, (4.6)
где интегрирование производится по всему объему тела. Величина r в этом случае есть функция положения точки с координатами х, у, z. 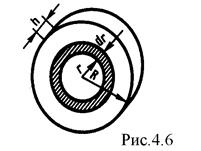
В качестве примера найдем момент инерции однородного сплошного цилиндра высотой h и радиусом R относительно его геометрической оси (рис.4.6). Разобьем цилиндр на отдельные полые концентрические цилиндры бесконечно малой толщины dr с внутренним радиусом r и внешним r + dr. Момент инерции каждого полого цилиндра dI = r2 dm (так как dr << r, то считаем, что расстояние всех точек цилиндра от оси равно r), где dm - масса всего элементарного цилиндра; его объем 2πrh dr. Если ρ - плотность материала, то dm = ρ·2πrh dr и dI = 2π ρhπr3dr . Тогда момент инерции сплошного цилиндра
 ,
,
но так как πR2 h - объем цилиндра, то его масса m = πR2 hρ, а момент инерции
 .
.
Если известен момент инерции тела относительно оси, проходящей через его центр масс, то момент инерции относительно любой другой параллельной оси определяется теоремой Штейнера: момент инерции тела I относительно любой оси вращения О равен моменту его инерции IC относительно параллельной оси, проходящей через центр масс С тела, сложенному с произведением массы m тела на квадрат расстояния a2 между осями:
 I = IC + ma2. (4.7)
I = IC + ma2. (4.7)
Приведем значения моментов инерции (табл.1) для некоторых тел (тела считаются однородными, m - масса тела).
| Таблица 1 | ||
| Тело | Положение оси вращения | Момент инерции |
| Полый тонкостенный цилиндр радиусом R | Ось симметрии | mR2 |
| Сплошной цилиндр или диск радиусом R | То же | 1/2mR2 |
| Прямой тонкий стержень длиной l | Ось перпендикулярна стержню и проходит через его середину | 1/12 ml2 |
| Прямой тонкий стержень длиной l | Ось перпендикулярна стержню и проходит через его конец | 1/3 ml2 |
| Шар радиусом R | Ось проходит через центр шара | 2/5 mR2 |
Дата добавления: 2015-11-18; просмотров: 777;