Основные определения курса ТММ
Машина
По мере развития машин содержание термина "машина" изменялось. Для современных машин дадим следующее определение:
Машина есть устройство, создаваемое человеком для преобразования энергии, материалов и информации с целью облегчения физического и умственного труда, увеличения его производительности и частичной или полной замены человека в его трудовых и физиологических функциях.
Классификация машин
1.Энергетические машины (электродвигатели, ДВС, компрессоры и т.д.);
2.Транспортные машины (краны, конвейеры, автомобили и т.д.);
3.Технологические машины (металлорежущие станки, полиграфические, горнодобывающие, швейные машины и др.);
4.ЭВМ.
Механизм
Существует несколько определений. Дадим одно из них.
Механизм есть система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других тел.
Все механизмы можно разделить на плоские и пространственные.
У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных плоскостях.
У пространственного механизма точки его звеньев описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях.
Классификация механизмов (по конструктивным признакам)
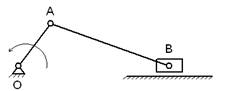
Рычажные механизмы (рис.1.1).
Рычажные механизмы являются основными в различных машинах. Например, в строгальных станках они выполняют основную рабочую операцию - строгание заготовки, преобразуя вращательное движение вала в возвратно-поступательное движение резца; в ДВС - преобразуют возвратно-поступательное движение поршней во вращательное движение главного вала, в штамповочной машине - осуществляют срез материала.
а). б). в).
Рис.1.1
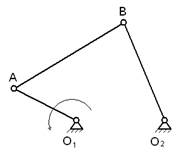
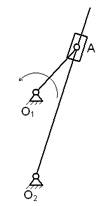
Среди этого типа механизмов наибольшее распространение получили плоские рычажные четырехзвенные механизмы (рис.1.1,а, б, в). На рис.1.1,а показан кривошипно-ползунный механизм, который используется для преобразования вращательного движения кривошипа ОА в возвратно-поступательное движение ползуна В. Ползун и кривошип соединяются с помощью звена АВ (шатуна), совершающего плоскопараллельное движение.Механизм, показанный на рис.1.1,б, называют кривошипно-коромысловым механизмом. Его ведущее звено О1А кривошипсовершает полнооборотное вращение, звено АВ шатун - плоскопараллельное движение, а ведомое звено ВО2 коромысло – неполнооборотное вращение. На рис.1.1,в показан кривошипно-кулисный механизм, состоящий из кривошипа О1А, кулисы АО2, представляющей собой подвижное направляющее звено, по которому движется кулисный камень.
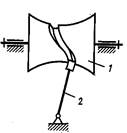
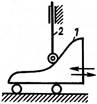
Кулачковые механизмы (рис. 1.2).
Кулачковые механизмы образуются путем силового замыкания кулачка и толкателя. Кулачок 1 обычно представляет собой диск, профиль которого очерчен определенной кривой, которая задает движение толкателю 2. Для уменьшения потерь на трение толкатель снабжают цилиндрическим роликом.
Механизмы используют для преобразования вращательного (рис.1.2,а) или возвратно-поступательного (рис.1.2,б) движения кулачка в возвратно-поступательное движение толкателя. Применяют также сложные пространственные механизмы (рис.1.2,в).
Используются: в строгальных и долбежных станках для поперечного перемещения стола с обрабатываемой деталью, в ДВС - для открытия клапанов (распределительный вал).

а). б). в).
Рис.1.2
Зубчатые механизмы (рис.1.3).
Зубчатые механизмы образуются зубчатыми колесами. Передача нагрузки и движение осуществляется за счет воздействия зубьев друг на друга.
Их используют в большинстве механизмов для передачи энергии от двигателя к ведущим валам.

Рис.1.3
Фрикционные механизмы (рис.1.4).
Во фрикционных механизмах движение передается за счет сил трения, возникающих при контакте звеньев. Простейшая фрикционная передача (рис.1.4,а) состоит из двух цилиндрических катков 1 и 2 и стойки 3. Один каток прижимается к другому с помощью пружины. Используются в кинематических цепях приборов для обеспечения плавности движения, бесшумности и безударного включения. К фрикционным механизмам относятся и вариаторы (рис.1.3,б), которые обеспечивают плавное изменение угловой скорости ведомого звена 2 при равномерном вращении ведущего звена 1 и его перемещения вдоль оси.
а). 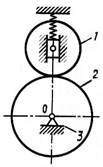 б).
б). 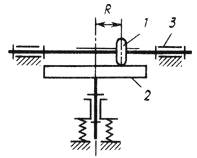
Рис.1.4
Гидравлические, пневматические механизмы (рис.1.5).
В этих механизмах для преобразования движения кроме твердых тел участвуют жидкие или газообразные тела. На рис.1.5 приведена схема гидравлического механизма, предназначенного для привода в движение поршня 1 с помощью распределителя 2. Жидкость в цилиндр 5 поступает из распределителя в результате поочередного включения электромагнитов 3 и 4. Гидравлическая схема включает в себя также насос 6, бак 7 и клапан 8. В пневматических механизмах насос заменяют источником сжатого воздуха.
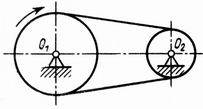
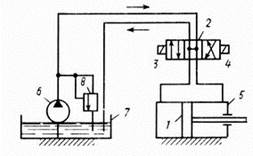
Рис.1.5 Рис.1.6
Механизмы с гибкими звеньями (рис.1.6).
Данные механизмы применяют для передачи вращательного движения на большие расстояния с преобразованием параметров вращения. Передача движения осуществляется за счет сил трения между шкивами 1, 2 и гибким звеном 3. В качестве гибких звеньев применяют ремни, канаты, цепи, нити.
 7.Клиновые механизмы (рис.1.7).
7.Клиновые механизмы (рис.1.7).
Рис.1.7
Простейший клиновой механизм состоит из клиньев 2, 3 и стойки 1. Он служит для преобразования одного прямолинейного движения в другое. Эти механизмы применяются различного вида прессов, поглощающих аппаратов железнодорожных автосцепок, зажимов, механизмов подачи деталей и т.д..
Машинный агрегат – это совокупность взаимосвязанных механизмов.
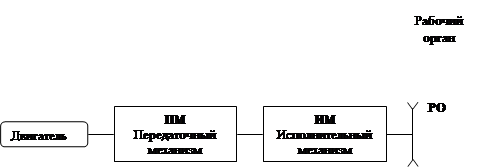
Рис.1.8 Блок-схема машинного агрегата
Звено
Дата добавления: 2015-08-21; просмотров: 889;