Основные применения регистров
Одно из основных применений регистров состоит в хранении требуемого кода в течение нужного времени. Если для работы остальной части схемы необходимо иметь входной код, который можно легко изменять, то для этого как раз подходит регистр.
На рис. 8.3 показана типичная схема включения регистра для хранения кода и временная диаграмма его работы. Код на входе регистра может изменяться произвольным образом, но в тот момент, когда этот код принимает необходимое значение, на вход С триггера подается синхросигнал (строб), который записывает код в регистр. Этот код будет храниться в регистре до прихода следующего строба. Причем важно и то, что все разряды выходного кода регистра будут переключаться одновременно даже в том случае, когда разряды входного кода переключаются не одновременно. Главное, чтобы к приходу положительного фронта строба (сигнала С) все разряды входного кода приняли нужное, устойчивое значение.
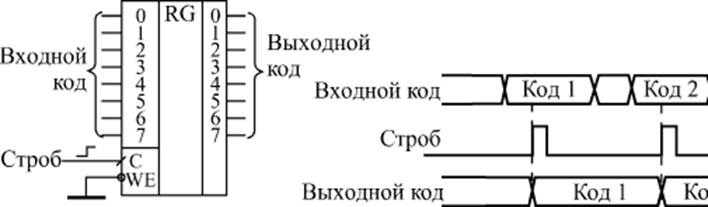
Рис. 8.3. Хранение кода в параллельном регистре
Еще одно применение регистров связано с запоминанием нескольких последовательных значений изменяющегося входного кода. Это позволяет сравнивать предыдущее значение кода с последующим значением этого же кода или производить арифметические операции над несколькими последовательными значениями одного и того же кода.
Для примера на рис. 8.4 показана схема вычисления разности двух последовательных значений входного кода. Такая задача возникает, в частности, при цифровой обработке аналоговых сигналов. Последовательные значения входного 4-разрядного кода сопровождаются тактовым сигналом, по положительному фронту которого производится запись в два последовательно включенных регистра. Когда на выходе регистра RG1 присутствует N-ое значение входного кода, на выходе регистра RG2 будет (N–1)-ое значение кода.
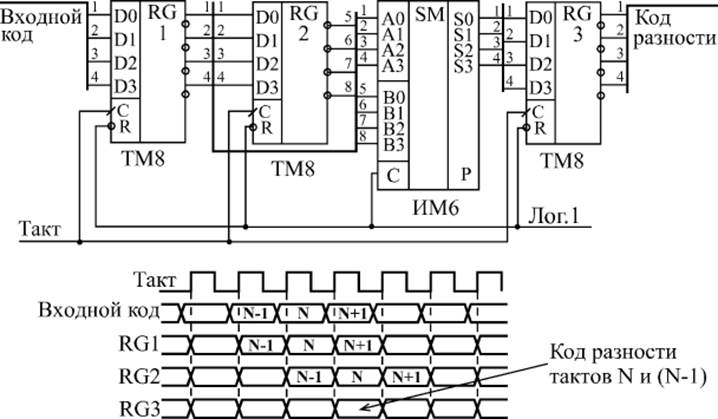
Рис. 8.4. Схема вычисления разности значений кодов в двух последовательных тактах
Подавая эти два кода с выходов регистров на 4-разрядный сумматор, включенный в режиме вычитания (см. рис. 8.4), мы получаем на выходе сумматора код разности между N-ым значением и (N–1)-ым значением.В данном случае очень удобен регистр ТМ8, имеющий инверсные выходы. Для обеспечения строго одновременного изменения выходных сигналов сумматора можно включить дополнительный выходной регистр RG3, тактируемый тем же самым общим тактовым сигналом. Правда, код разности при этом будет задержан на один такт.
Регистры также широко используются для организации конвейерной обработки, позволяющей существенно повысить тактовую частоту работы схемы. Ускорение при этом достигается за счет распараллеливания работы нескольких последовательно включенных узлов схемы.
Пусть, например, последовательность входных кодов, следующих с периодом T, поступает на вход цепочки из двух узлов, производящих обработку или преобразование этих кодов (рис. 8.5). Узлы эти могут представлять собой комбинационные микросхемы (например, сумматоры) или более сложные устройства, включающие в себя микросхемы счетчиков или микросхемы памяти. Главное состоит в том, что выходные сигналы этих узлов выставляются не мгновенно, а в течение какого-то конечного времени, величина которого определяется внутренним строением узла. Пусть задержка установления выходного кода первого узла равняется t1, а задержка установления выходного кода второго узла составляет t2. Очевидно, что период T следования входных кодов не должен быть меньше, чем сумма этих двух задержек:
T>  .
.
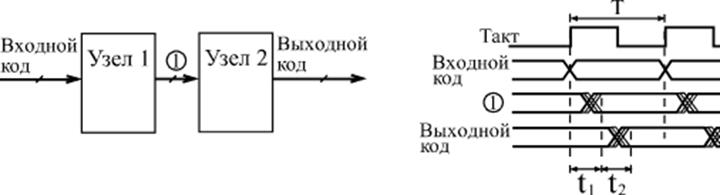
Рис. 8.5. Работа последовательной цепочки двух узлов
Иначе код на выходе цепочки может никогда не принять устойчивого значения, так как переходный процесс предыдущего такта будет сменяться переходным процессом следующего такта. То есть быстродействие узлов накладывает жесткое ограничение на тактовую частоту.
Однако можно обойти это ограничение, если воспользоваться принципом конвейера, заставить узлы работать не последовательно, а параллельно. Это достигается включением между узлами регистра, тактируемого входным тактовым сигналом. Еще один регистр целесообразно включить на выходе второго узла, что обеспечит длительность устойчивого кода на выходе всего устройства, равную длительности периода тактового сигнала Т (рис. 8.6). В результате ограничение на период тактового сигнала становится более мягким: Т не должно быть меньше максимальной из двух величин t1 и t2 с добавлением времени задержки регистра:
T> 
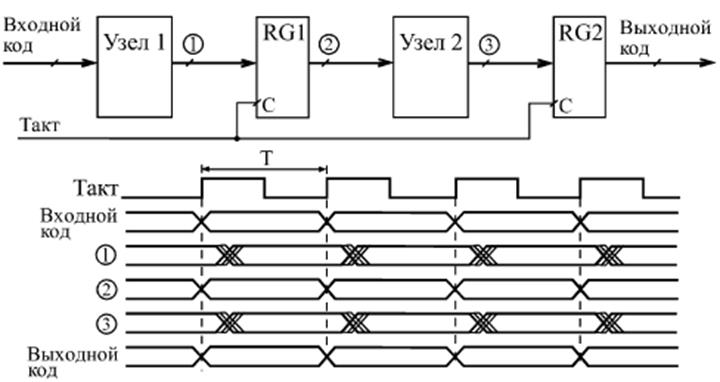
Рис. 8.6. Конвейерная обработка с помощью регистров
Дата добавления: 2015-08-21; просмотров: 5196;