Simulink
Программа Simulink, являющаяся приложением к пакету MatLab, представляет собой интерактивный инструмент для моделирования, имитации и анализа нелинейных динамических систем. Он дает возможность строить графические блок-диаграммы, имитировать динамические системы, исследовать работоспособность систем и совершенствовать проекты. При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым, пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний требующихся при работе на компьютере и, естественно, знаний той предметной области, в которой он работает.
Simulink является достаточно самостоятельным инструментом MatLab и при работе с ним совсем не требуется знать сам MatLab и остальные его приложения. С другой стороны доступ к функциям MatLab и другим его инструментам остается открытым и их можно использовать в Simulink. Часть входящих в состав пакетов имеет инструменты, встраиваемые в Simulink (например, LTI-Viewer приложения Control System Toolbox – пакета для разработки систем управления). Имеются также дополнительные библиотеки блоков для разных областей применения (например, Power System Blockset – моделирование электротехнических устройств, Digital Signal Processing Blockset – набор блоков для разработки цифровых устройств и т.д).
При работе с Simulink пользователь имеет возможность модернизировать библиотечные блоки, создавать свои собственные, а также составлять новые библиотеки блоков.
При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц. Преимущество Simulink заключается также в том, что он позволяет пополнять библиотеки блоков с помощью подпрограмм написанных как на языке MatLab, так и на языках С++, Fortran и Ada.
В качестве примера использования Simulink рассмотрим модель переменного сопротивления или переменного резистора, Rvar величина которого управляется сигналом управления k (рисунок 3.1, а). Такой объект может быть полезен примоделировании нелинейных электрических систем, отладке моделей электрических цепей и во многих других случаях. Модель такого элемента можно реализовать с помощью постоянного резистора RN и управляемого источника напряжения Ucontr (рисунок 3.1, б). В соответствии с законом Ома  (см /6/), где U — падение напряжения на Rvar.
(см /6/), где U — падение напряжения на Rvar.
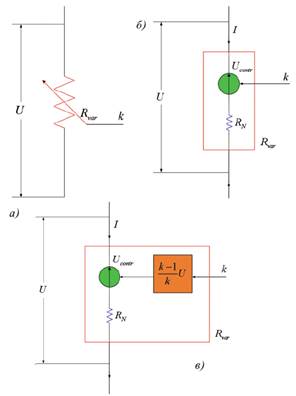
Рисунок 3.1 – Модель переменного сопротивления
Линейная зависимость Rvar(k)будет обеспечена, если в модель, изображенную на рисунке 3.1, б, добавить нелинейный блок, выполняющий преобразование  . В итоге мы будем иметь модель переменного сопротивления, величина которого изменяется прямо пропорционально сигналу управления k (рисунок 3.1, в).
. В итоге мы будем иметь модель переменного сопротивления, величина которого изменяется прямо пропорционально сигналу управления k (рисунок 3.1, в).
Данная модель легко реализовать с помощью блоков Simulink (рисунок 3.2). Блоки R_N, U_contr и блок нелинейного преобразования раскрашены в цвета, соответствующие раскраске элементов на рисунке 3.1, б и в.

Рисунок 3.2 – Модель переменного сопротивления в Simulink
Дата добавления: 2015-08-14; просмотров: 1839;