Бытовые роботы.
В последние несколько лет МС получили широкое распространение в быту: это и стиральные машины с микропроцессорным управлением, которые на основе анализа количества и степени загрязненности белья самостоятельно выбирают режимы работы, музыкальные центры с множеством сервисных функций, интеллектуальные кондиционеры, выбирающие режимы работы в зависимости от времени суток, количества находящихся в помещении людей, температуры наружного воздуха и состава воздуха внутри помещения и т.п.
– предназначены для помощи человеку в повседневной жизни. Сейчас бытовые роботы не слишком распространены, однако есть все основания
предполагать широкое их распространение в ближайшем будущем.
На данном этапе бытовые роботы – чаще всего предназначены для развлекательных целей, но всё большую популярность набирают роботы-уборщики, по своей сути - автоматические пылесосы, способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.

Рис.5.41. Робот-пылесос с интеллектуальным управлением.
Робот-пылесос с интеллектуальным управлением имеет 14 ультразвуковых и 4 инфракрасных сеннсора. Умеет обходить препятствия и ямы, а также возвращаться на свое место для зарядки аккумулятора.
В ряде стран проводятся большие работы по созданию гуманоидных роботов и роботов для чисто развлекательных целей. Так, например, на рис.5.42 показан робот- бильярдист, на рис.5.43 робот-трубач.
Рис.5.42. Робот-бильярдист.

Рис.5.43 Робот-трубач.
Типичным примером современного мехатронного устройства бытового назначения могут служить получившие широкое распространение устройства для считывания звуковой информации с оптических дисков.
Используемые в таких устройствах оптические диски способны хранить довольно большой объем. По плотности записи оптические диски уступают магнитным носителям, однако, по стоимости одного бита информации, легкости тиражирования, надежности и долговечности имеют преимущества перед другими видами носителей.
Стандартный компакт-диск имеет диаметр 12 см (минидиск – 9 см), толщину 1,2 мм и изготавливается из прозрачного поликарбоната. Цифровая информация в виде микроуглублений разной длины (питов) нанесена вдоль спиральной дорожки, разворачивающейся от центра диска. Считывание информации производится сфокусированным лазерным лучом (подробнее о различных видах оптических дисков и используемых для считывания информации длинах волн лазерного луча см. в разделе 3). Для увеличения количества информации на диске ее записывают и считывают при постоянной линейной скорости, поэтому угловая скорость вращения изменяется от 500 до 200 об/мин.
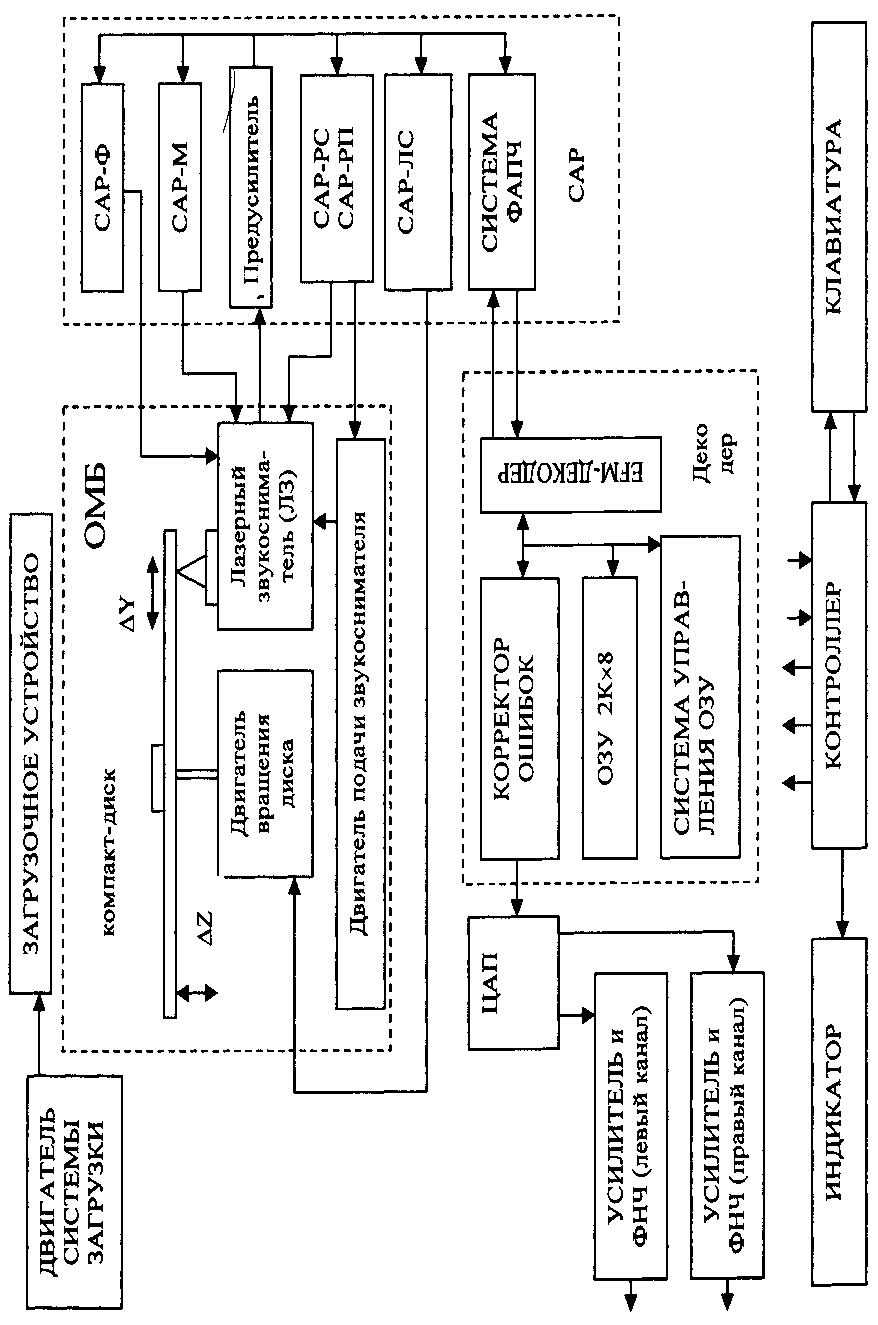
Одной из причин высокой надежность хранения и считывания информации является сложная система ее обработки и управления процессом считывания с помощью микроЭВМ. Обработка информации производится специализированным микропроцессором в процессе ее считывания с диска. Рассмотрим структуру и работу устройства считывания информации с оптического диска на примере лазерного проигрывателя музыкальных компакт-дисков (рис.1.28). Устройство состоит из шести функциональных узлов - загрузочного устройства, оптико-механического блока (ОМБ), узла систем автоматического регулирования (CAP), декодера, цифро-аналогового преобразователя (ЦАП) и контроллера управления и индикации. Загрузочное устройство автоматически загружает диск и устанавливает его на планшайбу двигателя вращения диска. ОМБ обеспечивает вращение оптического диска, перемещение лазерного звукоснимателя вдоль его радиуса, а также считывание информации с поверхности диска. Декодер декодирует и исправляет считываемую с диска цифровую информацию, которая с помощью ЦАП затем преобразует в аналоговый звуковой сигнал. Контроллер управления и индикации обрабатывает служебную информацию, считанную с диска и получаемую от датчиков, которая подается на устройство индикации, а также управляет системами устройства в различных режимах его работы [43].
Сигналы ошибок слежения по фокусировке и радиальному положению считывающей головки поступают на соответствующие устройства САР фокуса (САР-Ф) и радиального слежения (САР-РС) и используются для автоматического регулирования радиальной подачи (САР-РП) лазерного звукоснимателя. В режим регулирования все системы управляются однокристальной микроЭВМ.
Система автоматического регулирования мощности излучения лазера (САР-М) поддерживает ее на уровне 5 мВт независимо от дестабилизирующих факторов, что значительно увеличивает срок службы лазера.
САР линейной скорости (САР-ЛС) обеспечивает постоянную линейную скорость перемещения (около 1,2 м/с) считывающего лазерного пятна вдоль информационной дорожки. Устройство фазовой автоподстройки частоты (ФАПЧ) выделяет из сигнала EFM-кода частоту блочных синхроимпульсов, а фазовый детектор сравнивает эту частоту с частотой образцового кварцевого генератора и вырабатывает сигнал, управляющий двигателем вращения диска. Декодер представляет собой специализированный цифровой процессор обработки считанного с диска сигнала. В его состав входят EFM-декодер, корректор ошибок, система управления ОЗУ и само ОЗУ.

Работа EFM-декодера заключается в том, что он выделяет из цифрового потока информационные символы, синхросигналы и служебную информацию. По определенному алгоритму он преобразует информационные 14-разрядные символы в первоначальные 8-разрядные.
Функции всех названных устройств декодера выполняют специализированные БИС и одна БИС ОЗУ общего назначения. Использование предварительного (перед записью) перемежения символов позволяет распределить дефектные байты по значительной длине информационной дорожки диска и тем самым увеличить вероятность восстановления потерянной информации. В процессе декодирования считанной информации происходит сбор символов в изначальные блоки.
Помимо выполнения операций деперемежения БИС ОЗУ выполняет функции буферной памяти, позволяющей устранить влияние неравномерности вращения (детонации) диска на качество звучания. Информационные символы записываются в ОЗУ с переменной скоростью, которая колеблется относительно среднего значения. Считывается же информация синхронно с тактовым сигналом кварцевого генератора. В итоге детонация звука определяется только нестабильностью кварцевого резонатора.
ЦАП преобразует кодовые слова левого и правого звуковых каналов в аналоговые сигналы. Полученное в результате ступенчатое напряжение подается на усилители с фильтрами нижних частот (ФНЧ). Высокая верность преобразования достигается применением активных фильтров высокого порядка с частотой среза 20 кГц и неравномерностью в полосе пропускания не более ±0,5 дВ.
Служебная информация, выделенная EFM-декодером, обрабатывается микроЭВМ и отображается на многофункциональном индикаторе.
В режиме ускоренного поиска система работает следующим образом:
микрообъектив лазерного звукоснимателя перемещается на определенное число дорожек, все системы входят в режим слежения, считывается кадр служебной информации, содержащий номер информационного блока, и таким образом определяется местоположение считывающего пятна, после чего контроллер определяет, в какую сторону и с какой скоростью необходимо перемещать микрообъектив. Система ускоренного поиска позволяет найти нужное музыкальное произведение на диске за время, не превышающее 3 с.
Кроме программ управления устройством в контроллер записаны программы, которые могут вводить все подсистемы в режимы, необходимые для регулировки в процессе производства, поиска неисправностей и ремонта. Степень надежности считывания информации с оптических дисков можно проиллюстрировать следующими данными. При проигрывании музыкальных компакт-дисков расчетная частота появления одного сбойного байта составляет 10-9, что соответствует одной ошибке на 2 диска.
Реализация подобных устройств записи и считывания информации оказалась возможной благодаря успехам в развитии микропроцессорной техники, электроприводов и разработке сложных помехоустойчивых алгоритмов обработки цифровой информации.
Литература к главе 5
1. Капустин Н.М. Перемещение подвижного робота легкого класса в организованной среде по динамической модели движения / Н.М. Капустин, В.В. Борзенков, А.Г. Шумеев // Приводная техника. – №3. – 2001 – С. 16-21.
2. Робототехника и гибкие производства. В 9-ти кн. Кн. 7. Гибкие автоматизиро- ванные производства в отраслях промышленности: учеб. пособие для втузов / И.М. Макаров, П.Н. Белянин, Л.В. Лобиков и др.; под ред. И.М. Макарова. – М.: Высшая школа, 1986. – 176 с.
3. Гибкие производственные системы, промышленные роботы, робототехнические комплексы. В 14 кн. Кн. 4. Транспортно-накопительные системы ГПС.: практическое пособие / Л. И. Волчкевич, Б. А. Усов; под. ред. Б.И. Черпакова. – М.: Высшая школа, 1989. – 112 с.
4.Е.И. Юревич. Основы робототехники. – 2-е изд. перераб. и доп. – СПб.: БХВ-Петербург, 2005.
5. В.Л.Афонин, В.А.Макушин. Интеллектуальные робототехнические системы. - М.:Интернет Ун-т информационных технологий. 2005.- 208 с.
6. Обрабатывающее оборудование нового поколения. Концепция проектирования /В.Л.Афонин, А.Ф. Крайнев, В.Е. Ковалев и др.;М.:Машиностроение,2001.-256 с.
7. Станки-роботы. САД/САМ/САЕ Observer#5(49)/ 2009.
8. . ТФЦ 400-7 интегрированный центр. [Электорон.ресурс]. Режим доступа: http://www.elcom.ru/~mikron/Product/Razrabotka/TFZ 400 -7.htm.
9. Подураев Ю.В. Основы мехатроники: учеб. пособие / Ю.В. Подураев. – М.: МГТУ «СТАНКИН», 2000. – 80 с.
10. В. Г. Хомченко, В. Ю. Соломин. Мехатронные и робототехнические системы. Учебное пособие. Омск. Издательство ОмГТУ ,2008, 160 с.
11. А.К. Тугенгольд, И.В. Богуславский, Е.А.Лукьянов и др. Введение в мехатронику: учеб. пособие. книга 1, издание третье, перераб. и доп.-Ростов-на Дону Изд. центр ДГТУ, 20010.- 255 с.
12.Маглев – поезд на магнитном подвесе.[Электрон. ресурс].Режим доступа:http://1000news.org/other/maglev/.
13. Журнал СТА, №4, 2006, раздел: разработки/городской транспорт.
Positioning Control System and Drives. Compumotor Division, USA, 1994.
14. Саврасов Г. В. Основные направления развития медицинской робототехники / Г.В. Саврасов, А.С. Ющенко // Мехатроника.– 2000. – № 4. – С. 34-15. Козырев В.В. 15.Мехатронные модули для наноиндустрии: разработка, создание и внедрение/ В.В. Козырев//Мехатроника, автоматизация, управление.-2008.-№1.- С. 23.
16. . RIBA–в полку медицинских роботов пополнение! [Электрон. ресурс] Режим доступа: http://roboting.ru/robots/826-riba-v-polku-medicinskikh-robotov.html
17. Насосы космических челноков перекачивают человеческую кровь. [Электорон.ресурс].Режим доступа: http://www.micromedtech.com].
18.Морозов В.В. Имплантируемая система вспомогательного кровообращения на базе мехатронных модулей / В.В. Морозов, А.В. Жданов, Е.А. Новиков и др. – Владимир: Изд-во ВлГУ, 2006. – 160 с.].
19. Куликов Н.И. Проблемы создания имплантируемых систем обхода левого желудочка сердца и их техническое решение / Н.И. Куликов, В.Е. Толпекин, Д.В. Шумаков // Мехатроника, автоматизация, управление. – 2007. – №2. Приложение. – С. 2-6.]
20. Морозов В.В. Синтез имплантируемых систем вспомогательного кровообращения на базе мехатронных модулей / В.В. Морозов, А.В. Жданов, Е.А. Новикова // Мехатроника, автоматизация, управление. – 2007. – №8. Приложение. – С. 2-5.]
21. Управляемый мыслями протез готов к тестированию [Электрон. ресурс] Режим доступа:http://www.prorobot.ru/medrobots/robot_upravlenie_
protezom.php].
22. Оборудование производства компании TECAN. [Электорон.ресурс]. Режим доступа: http://www.tecan.ru
23. Робот-хирург da Vinci обзавёлся зрением высокого разрешения [Электрон. ресурс] Режим доступа: http://www.prorobot.ru/medrobots/robot_xirurg.php .
24. . Козырев В.В. Шарнирно-стержневая конструкция автоматизированного аппарата остеосинтеза и ее исследование / В.В. Козырев, А.И. Новожилов, О.В. Федотов, С.М. Паринов // Мехатроника, автоматизация, управление. – 2008. – № 3. Приложение. – С. 2-8.
25. Морозов В.В. Биомеханические тренажеры на базе мехатронных модулей для разработки посттравматических контрактур / В.В. Морозов, А.В. Жданов, А.Б. Костерин // Мехатроника, автоматизация, управление.– 2008. – №3. – С. 43-46.
26. Большая галерея роботов. [Электорон.ресурс]. Режим доступа: http://www.newsland.ru/News/Detail/id/346208/cat/65/].
27. Большая галерея роботов. [Электрон.ресурс]. Режим доступа: http://www.newsland.ru/News/Detail/id/346208/cat/65/
28. Медицинский наноробот общего назначения. [Электрон. ресурс] Режим доступа:http://kww.roboing.ru/nano/.
29. Наноробот.- Википедия. [Электрон. ресурс] Режим доступа:http://ru.wikipedia. org.
30. Козырев В.В. Мехатронные модули для наноиндустрии:разработка, создание и внедрение/ В.В. Козырев//Мехатроника, автоматизация, управление.-2008.-№1.-с23.
31. Комплект для превращения обычных авиабомб в высокоточное оружие. [Электорон.ресурс]. Режим доступа: http://www.rsci.ru/smi/?id=16114.
32. Некоторые общие сведения о принципиально новых видах и системах оружия. [Электорон.ресурс]. Режим доступа: http://www.nntu.scinnov.ru/RUS/otd_sl/gochs/posobiya/posob8/posob8glava6.htm.
33.Высокоточное оружие. [Электорон.ресурс]. Режим доступа: http://www.rg.ru/2008/07/09/bombi.html.
34. Россия подтвердила использование высокоточного оружия. [Электорон.ресурс]. Режим доступа: http://www.lenta.ru/news/2008/08/12/weapons/.
35. В Белоруссии создана высокоточная авиабомба с GPS-наведением. [Электорон.ресурс]. Режим доступа: http://www.warandpeace.ru/ru/news/view/35903/.
36. Военный робот–собака. [Электрон. ресурс]. Режим доступа: http://nanodroid.ru/robot/robot-sobaka-video/.
37. Вертолет К-52 «Аллигатор». Электрон. ресурс].Режим доступа:http://blog-number-1.blogspot.com/2007/10/52/html.
38. . Накопители на оптических дисках. [Электорон.ресурс]. Режим доступа: http://www.duplicators.ru/all/optical_info.html.
,
Дата добавления: 2015-08-11; просмотров: 2023;