Нанотехнологии в мехатронике
Одним из самых перспективных направлений развития мехатроники является микроминиатюризация мехатронных систем с использованием нанотехнологии (предполагающей работу с веществом на уровне отдельных атомов и молекул), что позволяет сделать качественный скачек, обеспечивающий беспрецедентную точность и эффективность МС[ 28-29].
Нанотехнологии обычно делят на три направления:
- изготовление электронных схем, элементы которых состоят из нескольких атомов;
- создание наномашин, то есть механизмов и роботов размером с молекулу;
- непосредственная манипуляция атомами и молекулами и сборка из них чего угодно.
Благодаря стремительному прогрессу в таких технологиях как оптика, нанолитография, механохимия и 3D-прототипировние нанореволюция может произойти уже в течение следующего десятилетия, что окажет огромное влияние практически на все отрасли промышленности и сферы общественной жизни.
Наноро́боты, или нанобо́ты – роботы, созданные из наноматериалов и сопоставимые по размером с молекулой (менее 10 нм), обладающие функциями движения, обработки и передачи информации, выполнения программ. Нанороботы, способные создавать свои копии, т.е. самовоспроизводиться, называются репликаторами. В настоящее время уже созданы электромеханические наноустройства, ограниченно способные к передвижению, которые можно считать прототипами нанороботов.
Иногда нанороботы описываются как машины, способные точно взаимодействовать с наноразмерными объектами или манипулировать объектами в наномасштабе. Вследствие этого, даже крупные аппараты такие как атомно-силовой микроскоп можно считать нанороботами, т. к. он производит манипуляции объектами на наноуровне. Кроме того, даже обычных роботов, которые могут перемещаться с наноразмерной точностью, можно считать нанороботами.
Нанороботы пока находятся в основном на научно-исследовательской стадии разработки, однако некоторые примитивные прототипы молекулярных машин уже созданы. Важнейшая сфера использования наномашин – медицина, где они могут быть использованы, например, для выявления и уничтожения раковых клеток, точной доставки лекарственных веществ, удавления вредных отложений на стенках сосудов, производить экспресс-анализ огромного количества химических соединений внутри организма и т. п.
Какие подсистемы должен иметь медицинский наноробот?
Так как основная функция наноробота – передвижение, например, по кровеносной системе человека, ему необходимо иметь несколько типов различных сенсоров для мониторинга окружающей среды, навигации, коммуникации и работы с отдельными молекулами. Нанороботу необходима транспортная система, доставляющая отдельные атомы и молекулы от хранилищ к наноманипуляторам, и обратно. Для работы с пораженными структурами наноробот должен быть снабжен набором складывающихся наноманипуляторов разного применения. Предполагаемый материал для изготовления медицинских нанороботов - алмазоид или сапфироид, что обеспечит биосовместимость. Нанороботы должны быть снабжены приемо-пердаточными устройствами, позволяющими нанороботам связываться с центром управления и друг с другом.
Описанные требования реализованы в модели медицинского наноробота общего применения [30]. В идеальном случае, это устройство будет способно «ремонтировать» поврежденные клетки, ткани; производить диагностику и лечение раковых заболеваний и картографировать кровеносные сосуды; производить анализ ДНК с последующей ее корректировкой; уничтожать бактерии, вирусы, и т. п. Максимальный размер устройства не должен превышать 1×1×3 мкм (без двигательных жгутиков). На рис. 5.29 представлен предполагаемый вид такого наноробота, выполненного из алмазоида.
Для обеспечения радиосвязи наноробота приемно-передающие антенны должны будут иметь вид диполей, выступающих за пределы корпуса. Наноманипуляторы, механические захваты и жгутики должны быть телескопическими и при необходимости должны прятаться в корпус робота, чтобы робот смог лучше передвигаться в кровеносном русле. Благодаря очень очень низкой биологической активности алмазоидной поверхности и сильной ее гидрофобности, внешняя оболочка роботов будет полностью химически инертна. Для функционирования такого наноробота необходим встроенный нанокомпьютер, производящий 106-109 операций в секунду [30].
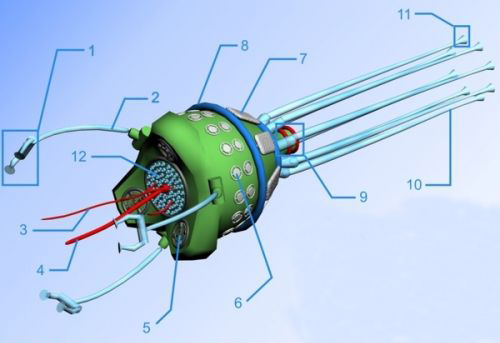
Ряис. 5.29. Медицинский наноробот общего применения: 1 - захват манипулятора; 2 – телескопический манипулятор; 3 – наноманипулятор; 4 – центральный наноманипулятор; 5 – сенсор биомолекул; 6 – акустический сенсор; 7 – сенсор параметров среды; 8 – дипольная радиоантенна; 9 – стыковочный коннектор; 10 – двигательный жгутик; 11 – присоска жгутика; 12 – гнезда наноманипуляторов
В настоящее время в МГТУ им. Н.Э. Баумана создана роботизированная система с ограниченными возможностями [14], включающая внутриартериальный носитель-микроробот, способный перемещаться по кровеносному руслу и оснащенный ультразвуковым микродатчиком, а также необходимым рабочим инструментом (рис.5.30).
| Хирург - оператор |
| Система безопасности |
| Ручное управление |
| Компьютер |
| Монитор |
| Интерфейс связи |
| Система внедрения |
| Микроробот |
| Ультразвуковой датчик |
| Микродвигатель |
| Хирургический инструмент |
| Состояние пациента |
| Кровеносный сосуд Биологический объект |
Рис.5.30. Функциональная схема робототехнической системы
для внутрисосудистой диагностики и хирургии
Хирург-оператор, получая информацию о состоянии сосуда, имеет возможность с помощью микроробота осуществлять процедуры как медикаментозного, так и хирургического характера.
К числу задач, особенно актуальных в медицинской практике, относятся диагностика и хирургия сосудистых заболеваний. В Японии, Италии, России ведутся работы по созданию мобильных микророботов, предназначенных для разрушения атеросклеротических отложений в кровеносных сосудах. Предполагается, что мобильные микророботы будут работать в автоматическом режиме, перемещаясь по анатомическому руслу кровеносной системы.
Использование клинических робототехнических систем позволяет не только отказаться в ряде случаев от традиционных медицинских технологий, но и существенно облегчить условия труда хирургов.
Все большую роль играют микророботы, способные самостоятельно функционировать внутри человеческого организма. Медицинские робототехнические системы являются медицинскими по своей сути, объединяя в единое целое механические и электронные компоненты, функционирующие в составе интеллектуальной робототехнической системы. ниже рассмотрены основные достижения в области медицинской мехатроники и намечены перспективы ее дальнейшего развития.
Роботы для реабилитации инвалидов.
Медицинские роботы реабилитации предназначены главным образом для решения двух задач: восстановления функций утраченных конечностей и жизнеобеспечения инвалидов, прикованных к постели (с нарушениями зрения, опорно-двигательного аппарата и другими тяжкими заболеваниями).
История протезирования насчитывает не одно столетие, но к мехатронике непосредственное отношение имеют лишь так называемые протезы с усилением. Современные автоматизированные протезы не нашли широкого применения из-за конструктивных и эксплуатационных несовершенств и малой надежности в работе. Но уже сейчас делается многое, чтобы улучшить их характеристики за счет внедрения в их конструкцию новых материалов и элементов, таких, как пленочные тензодатчики для управления силой сжатия пальцев руки-протеза, электронно-оптические датчики, монтируемые в оправе очков для управления протезом руки с помощью глаз пациента и т.п.
В Японии разработана механическая рука, исполнительный орган которой имеет шесть степеней свободы и систему управления протезом. В Оксфорде (Великобритания) создана система управления для манипуляторов, предназначенных для протезирования, особенностью которых является способность выполнения заданий заранее не запрограммированных. Они обеспечивают обработку сенсорной информации, включая систему распознавания речи. Одной из проблем является формирование управляющих сигналов пациентом без помощи конечностей. Известны устройства для помощи пациентам с двумя или четырьмя ампутированными или парализованными конечностями, приводимые в движение с помощью электрического сигнала, возникающими в результате сокращения мышц головы или туловища. Разработана конструкция механической руки с телесистемой, управление которой осуществляется датчиками на голове больного, реагирующими на движение головы или бровей и подающими сигналы микропроцессору, управляющему исполнительным органом манипулятора.
Для решения задач жизнеобеспечения неподвижных больных созданы различные варианты роботизированных систем. Качественно новым конструктивным решением является антропоморфная рука – манипулятор, смонтированная на инвалидной коляске и управляемая ЭВМ. Данная система позволяет больному с минимальным уровнем подготовки управлять рукой - манипулятором для удовлетворения физиологических потребностей, пользования телефоном и т.д.
Известны медицинские роботизированные комплексы, функционирование которых осуществляется через центральный контрольный пост или с помощью различных командных устройств, задание для которых пациент формирует с помощью речевых команд. Система включает в себя антропоморфную руку - манипулятор, управляющую аппаратуру, командное устройство, телевизионный монитор, а также автоматизированную транспортную тележку. По желанию больного включаются телевизор, радио, осветительные приборы, изменяется положение больного на кровати, приводится в действие манипулятор.
Важной проблемой, связанной с реабилитацией инвалидов, является создание для них рабочих мест. В Великобритании разработано автоматизированное рабочее место для инвалидов с нарушениями опорно-двигательной системы. Робот представляет собой манипуляционную систему, которая управляет речевыми командами оператора; он способен по желанию пациента выбирать музыкальные диски, книги, переворачивать листы читаемой книги, переключать периферийные устройства компьютера, набирать номера телефонов.
В США было разработано автоматизированное рабочее место с антропоморфной рукой – манипулятором для инвалидов, страдающих тяжелой формой нарушения опорно–двигательной системы. Пациент с минимальным уровнем подготовки может управлять роботом, предназначенным для приема пищи, питья, ухода за волосами, чистки зубов, чтения, пользования телефоном, а также для работы на персональном компьютере. Контроллер, размещенный под подбородком пациента, для управления автоматизированным рабочим местом может монтироваться на инвалидной коляске или на столе рабочего места. Это делает, в частности, возможным использование большого числа автоматизированных рабочих мест для одновременного кормления группы пациентов. Такие мероприятия обеспечивают пациентам возможность общения друг с другом и способствуют их осознанию себя как полноправного члена общества.
Дата добавления: 2015-08-11; просмотров: 2150;