Мобильные робототехнические комплексы
Мобильные робототехнические комплексы применяются при:
- боевом обеспечении спецопераций (заградительный огонь, разведка боем, разрушение заграждений и т. п.), проведении разведки;
- проведении взрывотехнических работ (поиск, извлечение, транспортирование и обезвреживание или уничтожение взрывоопасных предметов и неразорвавшихся -боеприпасов; взрывные работы); обеспечении безопасности важных объектов.
По массе (и, следовательно, мобильности) и основному назначению МРК можно разделить на 4 группы:
сверхлегкие, массой до 35 кг (рис. 5.16);
легкие, массой до 150 кг;
средние, массой до 800 кг;
тяжелые, массой свыше 800 кг.

Рис.5.16. Сверхлегкий мобильный робот МРК-01 (МГТУ им. Н.Э. Баумана). Предназначен для проведения инспекционных проверок, поиска и уничтожения взрывоопасных предметов. Является базовым образцом для семейства малогабаритных роботов.
Изначально заложенный в конструкцию большинства роботов модульный принцип позволяет создавать многофункциональные комплексы, используя единую транспортную систему в качестве базовой и формируя рабочую систему при установке сменного вооружения или рабочего оборудования и требуемой системы управления.
Для роботов массой до 800 кг разрабатываются оригинальные специализированные транспортные модули (рис. 5.17). Более тяжелые робототехнические системы используют в качестве базовых шасси, серийно выпускаемые образцы военной и гражданской транспортной техники (рис. 5.18).
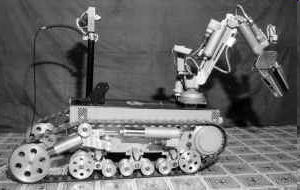
Рис.5.17. Мобильный робототехнический комплекс МРК-25 (МГТУ им. Н.Э. Баумана) имеет конвертируемую ходовую часть. Складывание гусеничного обвода дает возможность роботу маневрировать в стесненных условиях (например, разворачиваться на лестничных площадках) и обеспечивает перевозку робота в джипе или микроавтобусе.

Рис.5.18. Транспортное средство роботизированной системы разминирования ETODS (OAO, США) выполнено на базе погрузчика типа “Bobcat”.
Конструктивно универсальные мобильные роботы представляют собой малогабаритные самоходные средства, оснащаемые разведывательной аппаратурой, набором сменного рабочего оборудования и инструмента. Рассчитаны на дистанционное управление оператором, ведущим наблюдение непосредственно или с помощью телевизионной камеры. В состав установленных на роботах комплексов приборов и оборудования входят:
- телевизионная аппаратура (на современных образцах, как правило, цветного изображения), включающая телевизионные камеры (до четырех единиц) и портативные мониторы, по которым оператор ведет наблюдение за местностью и управляет работой машины;
- осветительные средства (прожекторы) для подсветки при действиях в темное время суток и низких уровнях освещенности;
- манипуляторы для захвата, перемещения и транспортирования объектов;
- портативная рентгеновская аппаратура для обследования на месте обнаруживаемого объекта и определения степени его опасности;
- оборудование для уничтожения наместе взрывоопасных предметов (наибольшее распространение получили гидродинамические разрушители, используемые для уничтожения самодельных взрывных устройств в неметаллических оболочках, ацетиленовые горелки для сжигания неметаллических мин и гладкоствольные ружья для стрельбы тяжелыми пулями-болванками);
- набор инструмента для разборки, отделения или вывода из строя отдельных компонентов обнаруженного боеприпаса в целях его нейтрализации;
- набор стетоскопов для прослушивания работы часовых механизмов взрывателей замедленного действия, а также зеркал для обследования отдельных компонентов подозрительного объекта, расположенных в труднодоступных местах.
Сами машины выполняются на шасси из алюминиевых сплавов и легированной стали с колесной, гусеничной или сменной (быстро заменяемой с колесной на гусеничную и обратно) ходовой частью (рис. 5.19). На шасси смонтирован полноповоротный (как правило) манипулятор, приспособленный для установки сменного рабочего оборудования, аппаратуры или инструмента. В качестве энергетической установки чаще всего служат электрические аккумуляторы, их емкости обычно достаточно для работы в течение нескольких часов, однако возможно применение двигателя внутреннего сгорания или питание отвнешнего источника электроэнергии. При использовании аккумуляторов привод ходовой части машины и рабочего оборудования обычно электромеханический, а двигателя внутреннего сгорания – гидравлический. Дистанционное управление работой машин осуществляется по радио (на дальности до 4000 м), по волоконно-оптической линии связи (на расстоянии до 400 м), либо по кабелю. (на расстоянии до 100 м).

Дата добавления: 2015-08-11; просмотров: 2199;