Классификация и устройство нивелиров
Нивелиры классифицируют по двум признакам: по точности и по способу установки визирного луча в горизонтальное положение.
По первому признаку нивелиры делятся на группы:
1. Высокоточные – средняя квадратическая погрешность на 1 км двойного хода – 0,5 мм. К ним относятся такие марки, как Н-1, Н-2, НС-2, Н-05, 3Н-2 – КЛ. При работе с этими нивелирами допускается длина плеч (расстояние от нивелира до рейки) до 50 метров.
2. Точные – средняя квадратическая ошибка на 1 км двойного нивелирования 3 мм. Примером нивелиров являются марки Н-3, 2Н-3Л, НС-3, НС-4, 3Н – 2КЛ. Допускается длина плеч до 75 – 100 метров.
3. Технические – ошибка 10 мм на 1км двойного хода. К ним относятся такие нивелиры, как НТ, НТС, Н10 и другие. Длина плеч допускается до 100 – 150 метров.
По второму признаку нивелиры различают:
1. Уровенные (с цилиндрическим уровнем, рис. 59).
2. Нивелиры с самоустанавливающейся линией визирования (с компенсатором).
Некоторые метрологические характеристики нивелиров следующие ГОСТ 10528-90 Нивелиры.
Общие технические условия:
| Наименование параметра (показателя) | Группа нивелиров | |
| высокоточных | точных | технических |
| Допустимая средняя квадратическая погрешность измерения превышения на 1 км двойного хода, мм: | - для нивелиров с компенсатором 0,3 2,0 5,0 - для нивелиров с уровнем 0,5 3,0 5,0 | |
| Увеличение зрительной трубы, крат, не менее | 40 30 20 |
Основные составные части нивелира (на примере 2Н-3Л, рис. 59):
1 – окуляр, для увеличения изображения цели; 2 – диоптрийное кольцо, для получения четкого изображения сетки нитей; 3 – круглый уровень, для приведения прибора в рабочее положение (приведения основной оси вращения в отвесное положение); 4 – кремальера, для получения четкого изображения цели; 5 – зрительная труба; 6, 9 – подставка, служит основанием прибора, несет вертикальную ось вращения зрительной трубы; 7 – наводящий винт трубы, для точного наведения на цель; 8 – пружина трегера с втулкой служит для закрепления нивелира на штативе становым винтом; 10 – элевационный винт для приведения в нульпункт пузырька цилиндрического уровня; 11 – нониус, для отсчета углов по горизонтальному лимбу при угломерных работах; 12 – объектив, для формирования изображения визирной цели; 13 – механический визир, для приближенного наведения на цель; 14 – цилиндрический уровень, для приведения визирной оси зрительной трубы в строго горизонтальное положение; 15 – исправительный винт уровня при трубе, для исправления положения пузырька цилиндрического уровня; 16 – три подъемных винта для приведения прибора в рабочее положение; исправительные винты круглого уровня, для исправления положения пузырька уровня на рисунке не видны, 17 – лимб, для измерения горизонтальных углов.


Рис. 59. Внешний вид нивелира 2Н-3Л
Нивелир 2Н-3Л относится к точным нивелирам. Нивелир 2Н-3Л – 2-ое поколение нивелира Н-3 – точный, с уровнем, элевационным винтом и лимбом, предназначен для измерения превышений, расстояний и горизонтальных углов. Средняя квадратическая погрешность измерения превышения на 1 км двойного хода 2,5 мм. Отличается от предшествующих марок нивелиров (НВ-1, Н-3) отсутствием закрепительного винта трубы, наличием лимба, имеет трубу прямого изображения, современный дизайн.
Рис. 60. Поле зрения зрительной трубы
Отсчет по рейке 1,150 м. Расстояние S=(1,236-1,064)∙100=17,2 м
В настоящее время широкое применение находят геодезические приборы (нивелиры, теодолиты и др.), в которых уровень заменяется автоматическим устройством – компенсатором наклона визирной оси, или «регулятором» положения визирной оси. Нивелир снабжается только круглым уровнем для грубого приведения визирной оси в горизонтальное положение, горизонтальность линии визирования обеспечивается с необходимой точностью автоматическим компенсатором наклона. Компенсаторы наклона позволяют повысить точность и производительность труда, дают возможность работать на неустойчивых грунтах. Сущность работы компенсатора заключается в следующем.
При горизонтальном положении визирной оси трубы по средней нити сетки производят правильный отсчет А, соответствующий горизонту инструмента (рис. 61). При наклоне зрительной трубы на угол γ горизонтальный луч, соответствующий отсчету А, смещается вверх или вниз относительно средней нити сетки на величину С0С1=∆=f∙sinγ≈f∙γ/ρ". Для того чтобы отсчет А по средней нити сетки не изменялся, нужно либо изменить положение сетки нитей из положения С0 в С1 (механический компенсатор, рис. 61, б), либо изменить направление горизонтального луча, соответствующего отсчету А так, чтобы этот луч снова попал на среднюю нить сетки (оптико-механический компенсатор, рис. 61, в).
| О |
А
С0
f
б
| О |
γ С1
В β
S
f С0
| О |
В β S С1
γ
С0
f
Рис. 61. Принцип работы компенсатора
Смещение сетки нитей или изменение положения визирного луча осуществляется с помощью расположенного в точке В специального устройства – компенсатора наклона зрительной трубы на величину ∆=S∙sinβ.
Отсюда следует основное уравнение компенсации: f∙sinγ=S∙sinβ.
Существует еще одна группа компенсаторов – жидкостные, основанные на свойстве поверхности жидкости под действием силы тяжести устанавливаться нормально к отвесной линии. В геодезических приборах жидкостные компенсаторы применяют редко. Они действуют также по схеме оптико-механических компенсаторов. Угол β отклонения луча и местоположение точки В рассчитываются таким образом, чтобы удовлетворялось основное уравнение компенсации. Отношение f/S=β/γ=n называется угловым увеличением компенсатора. Для того чтобы геометрические размеры компенсатора были невелики, точку В стремятся расположить внутри зрительной трубы (n≥1).
Компенсаторы наклона содержат подвижный элемент, находящийся в определенном положении под действием силы тяжести, неподвижный оптический элемент (например, отклоняющую призму) и демпфирующее устройство (демпфер) воздушного или магнитного типа. Жидкостные демпферы не используются в нивелирах с компенсатором.
В геодезии наиболее широко применяются оптико-механические компенсаторы маятникового типа, которые, в свою очередь, подразделяются на линзовые, зеркальные, призменные. В мире выпущено более 70 типов компенсаторов, поэтому вышеприведенное разделение на виды весьма условно.
Все компенсаторы можно сгруппировать в соответствии с их расположением в нивелире:
- с компенсатором перед объективом – НСМ-2А (СССР);
- с подвижным объективом или сеткой нитей – Сальмойраш 5172 и 5173 (Италия);
- с компенсатором между основным и фокусирующим компонентами телеобъектива – Ni-002 (ГДР), Ni-А31 (ВНР), Никон (Япония) и др.;
- с компенсатором между фокусирующей линзой и сеткой нитей – Ni-025, Ni-007 (ГДР), Ni-В3 (ВНР), НС-3 (СССР) и др.;
-с компенсатором, служащим фокусирующим компонентом – Н-10КЛ.
Механическим компенсатором является качающаяся сетка на трех металлических нитях, имеющая длину, равную f (f=S, n=1). Под действием силы тяжести перекрестие сетки нитей занимает такое положение, что визирная ось системы отвесна.
Наиболее часто используются оптико-механические компенсаторы в виде свободно подвешенных зеркал, призм, линз. Если зеркало подвесить на маятнике так, чтобы оно составляло с горизонтальной плоскостью всегда одинаковый угол, то его можно использовать в качестве компенсатора, у которого f=2S, следовательно, n=2.
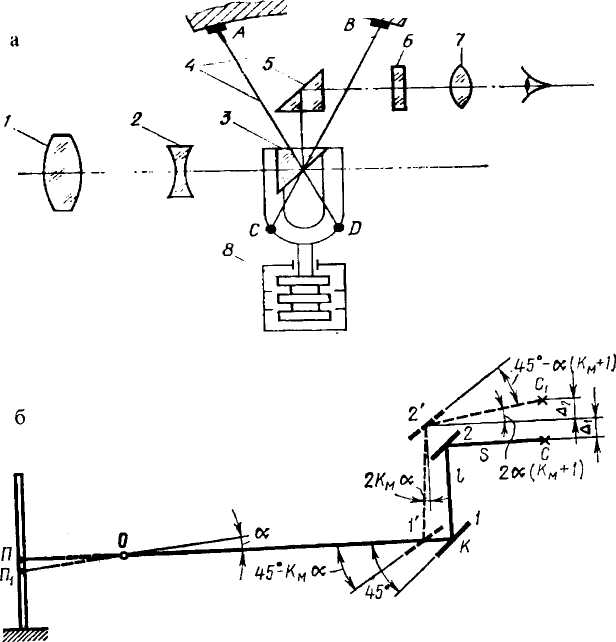
Рис. 62. Принципиальная схема (а) и схема действия (б)
призменного компенсатора:
1 - объектив; 2 - фокусирующая линза; 3 - призма-компенсатор; 4 – бериллиевые
нити; 5 - призма АР-90°; 6 - сетка нитей; 7 - окуляр; 8 - воздушный демпфер
Эту схему используют в точных нивелирах типа Н-3К. Здесь Км(n) < -1. При наклоне зрительной трубы на угол g перекрестие сетки нитей С смещается в положение С1. Компенсатор сдвигает изображение правильного отсчета П в новое положение перекрестия сетки нитей на значение:
D = D1 + D2
Полагают, что, из-за малости угла наклона g, изменение расстояний l и S мало, и записывают уравнение компенсации в виде:
¦’g =2lKMg + 2Sa(KM+1)
или
KM = ¦-2S/2(l+S).
Задаваясь значениями ¦, S и l, вычисляют геометрические размеры подвески компенсатора. Для нивелира Н-ЗК значения Км = 2,62÷3,143. При сборке прибора изменяют значение S до тех пор, пока погрешность компенсации не будет минимальна.
На этом принципе разработана схема нивелира 3Н-3КЛ (рис. 63).
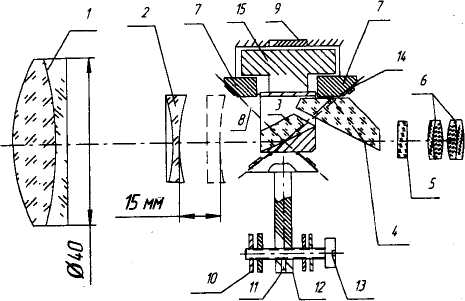
Рис. 63. Принципиальная оптико-механическая схема нивелира 3Н-3КЛ:
1 – объектив; 2 – фокусирующая линза; 3 – призма-компенсатор АР-60"; 4 – призма БкУ-60°; 5 – сетка нитей; 6 – окуляр; 7 — подвижные опоры; 8 – бериллиевые нити; 9,15 – магнитоиндукционные демпфер (поз. 15 одновременно выполняет роль балансира); 10 – грузики; 11 – стопорный винт; 12 – маятник; 13 – винт; 14 – прокладка
В настоящее время наряду с оптическими нивелирами выпускают цифровые и лазерные нивелиры, которые нашли широкое применение при решении инженерно-геодезических задач в народном хозяйстве. Применение этих приборов в несколько раз повышает производительность труда.
Существуют лазерные нивелиры и теодолиты, задающие световую плоскость и линию (рис. 65). Лазерные нивелиры делятся на приборы для выполнения внутренних работ и приборы для выполнения наружных работ.

Рис. 64. Структурные схемы передатчиков
На рисунке: 1 – лазер, 2 – коллиматор, 4 – блок развертки луча в плоскость (например, в виде вращающейся пентапризмы). Лазерный луч может устанавливаться в строго вертикальное положение точным цилиндрическим уровнем 3, круглым уровнем 7 и шарниром 5, круглым уровнем и компенсатором 8. В системах с наклонной опорной плоскостью (угол наклона ε переменный) между коллиматором или компенсатором и блоком развертки устанавливается блок 6 формирования угла наклона. Лазер и коллиматор могут располагаться горизонтально, но тогда необходим дополнительный оптический элемент, изменяющий направление лазерного луча с горизонтального на вертикальное.
Для формирования горизонтальной опорной плоскости необходимо направить идущий строго вертикально лазерный луч на вращающуюся вокруг вертикальной оси, совпадающей с лучом, призму (прямоугольную или пентапризму), изменяющую его направление на 90°.
Способы формирования опорной плоскости с переменным углом наклона ε (или уклоном i) можно разделить на две группы: оптико-механические и электрооптические. Одним из наиболее распространенных способов задания наклонной плоскости является способ, использующий свойство вращающейся прямоугольной (редко) призмы или пентапризмы, т.е. такой призмы, которая может изменять вертикальное направление входящего луча на горизонтальное, разворачивать луч, отклоненный от вертикали на угол ε, в плоскость, наклоненную к горизонту на тот же угол ε (для пентапризмы) или 2ε (для прямоугольной призмы). Если изменять угол отклонения луча от вертикали, то в пространстве будет изменяться угол наклона плоскости.
Для придания лазерному лучу определенного угла отклонения от вертикали, т.е. для управления этим лучом, имеется ряд устройств.
а)  б)
б) 
в) 
Рис. 65. Нивелиры
а) цифровой нивелир DINI; б) FL - 250 VA - N – автоматический мультифункциональный ротационный лазерный нивелир для измерений как внутри помещений – так и снаружи; в) построитель плоскости FL 40 - Pocket II
Лазерный нивелир с широкой разверткой лазерных лучей. Имеет новую систему призм и лазерный диод, подходит для строительно-ремонтных работ внутри помещений. Прибор имеет отсоединяемое многофункциональное крепление, позволяющее закреплять его на бетонные стены, деревянные балки и
металлические поверхности.
Дата добавления: 2015-08-11; просмотров: 11406;