Виды двигателей
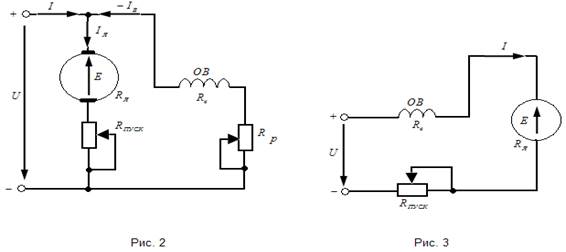
У двигателей с параллельным возбуждением обмотка рассчитана на полное напряжение питающей сети и включается параллельно цепи якоря (рис. 2).
Двигатель с последовательным возбуждением имеет обмотку возбуждения, которая включается последовательно с якорем, поэтому эта обмотка рассчитана на полный ток якоря (рис.3).
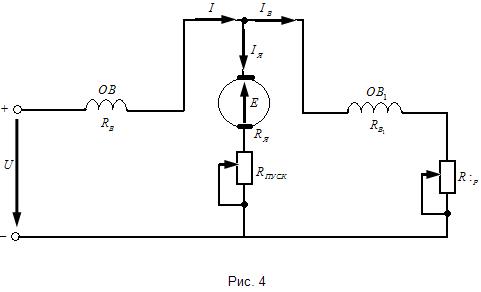
Двигатели со смешанным возбуждением имеют две обмотки, одна включается параллельно, другая — последовательно с якорем (рис.4).
При пуске электродвигателей постоянного тока (независимо от способа возбуждения) путем прямого включения в питающую сеть возникают значительные пусковые токи, которые могут привести к выходу их из строя. Это происходит в результате выделения значительного количества теплоты в обмотке якоря и последующего нарушения ее изоляции. Поэтому пуск двигателей постоянного тока проводится специальными пусковыми приспособлениями. В большинстве случаев для этих целей применяется простейшее пусковое приспособление — пусковой реостат. Процесс пуска электродвигателя постоянного тока с пусковым реостатом показан на примере двигателя постоянного тока с параллельным возбуждением (см. рис. 2).
Исходя из уравнения, составленного в соответствии со вторым законом Кирхгофа для правой части электрической цепи (см. рис .2), ток якоря
Iя == U – E == U – cc nФ
Rя Rя
где U — напряжение, подводимое к электродвигателю; Rя— сопротивление обмотки якоря.
В начальный момент пуска электродвигателя частота вращения якоря п = 0, поэтому противоэлектродвижущая сила, наводимая в обмотке якоря, в соответствии с полученным ранее выражением также будет равной нулю (Е = ссФn = 0). Сопротивление обмотки якоря Rя — величина довольно малая. Для того чтобы ограничить возможный при этом недопустимо большой ток в цепи якоря при пуске, последовательно с якорем независимо от способа возбуждения двигателя включается пусковой реостат (пусковое сопротивление Rпуск ). В этом случае пусковой ток якоря:
I я пуск =  .
.
Сопротивление пускового реостата Rпуск рассчитывают для работы только на время пуска и подбирают таким образом, чтобы пусковой ток якоря электродвигателя не превышал допустимого значения (Iя пуск <= 2Iя ном). По мере разгона электродвигателя ЭДС, наводимая в обмотке якоря, вследствие возрастания частоты его вращения п возрастает (Е = сспФ). В результате этого ток якоря при прочих равных условиях уменьшается. При этом сопротивление пускового реостата R пуск по мере разгона якоря
электродвигателя необходимо постепенно уменьшать. После окончания разгона двигателя до номинального значения частоты вращения якоря ЭДС возрастает настолько, что пусковое сопротивление может быть сведено к нулю, без опасности значительного возрастания тока якоря.
Таким образом, пусковое сопротивление R пуск в цепи якоря необходимо только при пуске. В процессе нормальной работы электродвигателя оно должно быть отключено, во-первых, потому, что рассчитано на кратковременную работу во время пуска, во-вторых, при наличии пускового сопротивления в нем будут возникать тепловые потери мощности, равные Rnycк Iя2, существенно снижающие КПД электродвигателя.
Для электродвигателя постоянного тока с параллельным возбуждением в соответствии со вторым законом Кирхгофа для якорной цепи (см. рис.2) уравнение электрического равновесия имеет вид Е = U — Rя Iя.
С учетом выражения для ЭДС (Е = сcnФ), записав полученную формулу относительно частоты вращения, получаем уравнение частотной (скоростной) характеристики электродвигателя и(/я):
n == U – RяIя == _U__ _Rя_ Iя
сcФ сcФ сcФ
Из него следует, что при отсутствии нагрузки на валу и токе якоря /я = 0 частота вращения электродвигателя при данном значении питающего напряжения
n = U/ccФ = n0.
Частота вращения электродвигателя m является частотой вращения идеального холостого хода. Кроме параметров электродвигателя она зависит также от значения подводимого напряжения и магнитного потока. С уменьшением магнитного потока при прочих равных условиях частота вращения идеального холостого хода возрастает. Поэтому в случае обрыва цепи обмотки возбуждения, когда ток возбуждения становится равным нулю (Iв = 0), магнитный поток двигателя снижается до значения, равного значению остаточного магнитного потока Фост. При этом двигатель «идет в разнос», развивая частоту вращения, на много большую номинальной, что представляет определенную опасность как для двигателя, так и для обслуживающего персонала.
Частотная (скоростная) характеристика электродвигателя постоянного тока с параллельным возбуждением п(1я) при постоянном значении магнитного потока Ф = const и подводимом напряжении U = const имеет вид прямой 1 (рис. 5).
Из рассмотрения этой характеристики видно, что с увеличением нагрузки на валу, т. е. с увеличением тока якоря Iя частота вращения электродвигателя уменьшается на значение, пропорциональное падению напряжения на сопротивлении цепи якоря RяIя.
Для электродвигателя постоянного тока с последовательным возбуждением в соответствии со схемой рис. 3 уравнение электрического равновесия по второму закону Кирхгофа имеет вид
U = E + (Rя + Rв)Iя
где Rв — сопротивление последовательной обмотки возбуждения двигателя.
С учетом того, что Е = сспФ, уравнение частотной характеристики электродвигателя постоянного тока с последовательным возбуждением приводится к следующему виду:
n == U + (Rя + Rв)Iя
ccФ
Как видно из этого уравнения, частота вращения двигателя зависит также и от сопротивления обмотки возбуждения Rb.
Примем во внимание то, что у двигателей постоянного тока с последовательным возбуждением (см. рис. 3) с изменением тока якоря вследствие изменения магнитного потока (в результате изменения тока якоря, от которого он зависит) частотная характеристика будет иметь вид, представленный на рис. 5 (кривая 2).
Из этого уравнения также видно, что с уменьшением нагруз
ки, т. е. с уменьшением тока якоря и, как следствие этого, с
уменьшением магнитного потока частота вращения двигателя
постоянного тока с последовательным возбуждением резко воз
растает, достигая большого значения при отсутствии нагрузки.
Поэтому двигатели постоянного тока с последовательным возбу
ждением «идут в разнос» в режиме холо
стого хода.

Двигатель постоянного тока со смешанным возбуждением, кроме обмотки параллельного возбуждения, магнитный поток которой Ф1 = const при постоянном значении напряжения U = const, имеет последовательную обмотку возбуждения, магнитный поток Ф2 которой зависит от тока якоря, т. е. от его нагрузки. Согласно второму закону Кирхгофа для якорной цепи электродвигателя со смешанным возбуждением (см. рис. 4) уравнение электрического равновесия и уравнение частотной характеристики имеют такой же вид, как и соответствующие уравнения, записанные для двигателя с последовательным возбуждением. Вследствие того что электродвигатели со смешанным возбуждением имеют две обмотки возбуждения, результирующий магнитный поток оказывается равным сумме магнитных потоков, создаваемых последовательной и параллельной обмотками возбуждения:
Ф = Ф1 + Ф2
где Ф1, Ф2 — магнитные потоки, создаваемые последовательной и параллельной обмотками возбуждения.
Благодаря наличию двух обмоток возбуждения (последовательной и параллельной) свойства электродвигателей постоянного тока со смешанным возбуждением представляют собой нечто среднее между свойствами двигателей постоянного тока с параллельным и последовательным возбуждением. Поэтому частотная характеристика электродвигателя со смешанным возбуждением имеет вид, представленный на рис. 5 (кривая 3), из которого видно, что эта характеристика располагается между частотными характеристиками двигателей постоянного тока с параллельным и последовательным возбуждением. Электродвигатели со смешанным возбуждением обладают улучшенными характеристиками по сравнению с двигателями с последовательным возбуждением и при отсутствии нагрузки на валу не «идут в разнос», так как частота вращения ограничивается при этом частотой вращения идеального холостого хода:
n0 = U/ceФ2
Выражая в уравнениях частотных характеристик ток якоря через электромагнитный момент двигателя М = смФIя, получим уравнение механической характеристики, т. е. зависимости п(М) при U = const для двигателей с параллельным возбуждением
n == _U __Rя___ M
ccФ cccvФ2
и для двигателей с последовательным и смешанным возбуждением
n == _U _Rя+Rв___ M
ccФ cсcмФ2
Пренебрегая влиянием реакции якоря в процессе изменения нагрузки, можно принять электромагнитный момент двигателя пропорциональным току якоря. Поэтому механические характеристики двигателей постоянного тока имеют такой же вид, как и соответствующие частотные характеристики. Электродвигатель с параллельным возбуждением имеет жесткую механическую характеристику (кривая1, рис. 6). Из этой характеристики видно, что его частота вращения с ростом момента нагрузки снижается незначительно, так как ток возбуждения при параллельном включении обмотки возбуждения и соответственно магнитный поток двигателя остаются практически неизменными, а сопротивление цепи якоря относительно мало.
Двигатели постоянного тока с последовательным возбуждением имеют мягкую механическую характеристику (кривая 2, рис. 6), поскольку с изменением момента нагрузки на валу изменяется ток якоря, а следовательно, и магнитный поток двигателя.
Двигатели постоянного тока со смешанным возбуждением имеют более мягкую механическую характеристику (кривая 3, рис.6), чем двигатели с параллельным возбуждением, и более жесткую, чем двигатели с последовательным возбуждением.
Одной из важных характеристик электродвигателей постоянного тока является моментная характеристика т. е. зависимость электромагнитного момента от тока якоря двигателя M(Iя). Для двигателей с параллельным возбуждением зависимость между моментом и током якоря определяется выражением М = СмФIя. Пренебрегая влиянием реакции якоря для этих двигателей, можно принять Ф = const, вследствие чего зависимость М(1Я) при U = const представится в виде прямой, проходящей через начало координат (кривая 3, рис. 7).
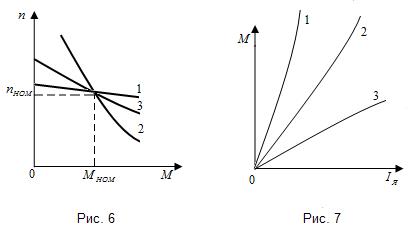
Для двигателей с последовательным возбуждением зависимость M(Iя) является более сложной, так как входящий в выражение М = СмФIя магнитный поток является функцией тока якоря. При некоторых допущениях для этих двигателей можно принять, что М = k Iя2, где к — соответствующий коэффициент пропорциональности. В результате моментная характеристика Двигателей постоянного тока с последовательным возбуждением представится в виде квадратичной зависимости, проходящей через начало координат (кривая 1, рис.7).
Двигатели со смешанным возбуждением имеют моментную характеристику, занимающую среднее положение между кривыми 1и 3 (кривая 2, рис. 7).
Рабочие характеристики двигателей постоянного тока представляют собой зависимости частоты вращения п, момента М, тока якоря Iяи КПД (  ) от полезной мощности на валу Р2 электродвигателя, т. е. n(Р2), М(Р2), Iя(P2), η(Р2) при неизменном напряжении на его зажимах U = const.
) от полезной мощности на валу Р2 электродвигателя, т. е. n(Р2), М(Р2), Iя(P2), η(Р2) при неизменном напряжении на его зажимах U = const.
Рабочие характеристики электродвигателя постоянного тока с параллельным возбуждением представлены на рис. 8. Из этих характеристик видно, что частота вращения п электродвигателей с параллельным возбуждением с увеличением нагрузки несколько уменьшается. Зависимость полезного момента на валу двигателя от нагрузки Р2 представляет собой почти прямую линию, так как момент этого двигателя пропорционален нагрузке на валу: М = 9550Р2/п. Искривление указанной зависимости объясняется некоторым снижением частоты вращения с увеличением нагрузки. При Р2 = 0 ток, потребляемый электродвигателем, равен току холостого хода. При увеличении мощности, развиваемой электродвигателем, ток якоря увеличивается приблизительно по той же зависимости, что и момент нагрузки на валу, так как при условии Ф = const ток якоря пропорционален моменту нагрузки. КПД электродвигателя определяют как отношение полезной мощности на валу к мощности, потребляемой из сети.
=  =
=  ,
,
где P2 – полезная мощность на валу; P1=UI – мощность, потребляемая электродвигателем из питающей сети; Pэя=Iя  Rя – электрические потери мощности в цепи якоря; Pэв=UIв=Iв Rв- электрические потери мощности в цепи возбуждения; Pмех – механические потери мощности; Pдоб – добавочные потери мощности; Рм- потери мощности в магнитопроводе на гистерезис и вихревые токи.
Rя – электрические потери мощности в цепи якоря; Pэв=UIв=Iв Rв- электрические потери мощности в цепи возбуждения; Pмех – механические потери мощности; Pдоб – добавочные потери мощности; Рм- потери мощности в магнитопроводе на гистерезис и вихревые токи.
КПД электродвигателя с увеличением мощности быстро нарастает и достигает максимального значения при условии, что переменные потери мощности в электродвигателе оказываются равными постоянным потерям мощности в нем, т. е. Рм = Рэв + Рэя +Pмех + Рдоб.
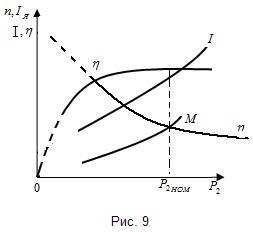
Рабочие характеристики электродвигателя постоянного тока с последовательным возбуждением представлены на рис. 9. Несколько другой вид рабочих характеристик этого электродвигателя по сравнению с двигателем с параллельным возбуждением объясняется тем, что с изменением нагрузки на валу (мощности Р2) происходит также изменение и магнитного потока.
Рабочие характеристики электродвигателей постоянного тока со смешанным возбуждением представляют собой зависимости, занимающие в прямоугольной системе координат некоторое, среднее положение между рабочими характеристиками двигателей с параллельным и последовательным возбуждением.
Важным является также возможность регулирования частоты вращения электродвигателей постоянного тока. Анализ выражений для частотных характеристик показывает, что частоту вращения электродвигателей постоянного тока можно регулировать несколькими способами: включением добавочного сопротивления Рдоб в цепь якоря, изменением магнитного потока Ф и изменением напряжения U, подводимого к двигателю.
Одним из наиболее распространенных является способ регулирования частоты вращения включением в цепь якоря электродвигателя добавочного сопротивления. С увеличением сопротивления в цепи якоря при прочих равных условиях происходит снижение частоты вращения. При этом чем больше сопротивление в цепи якоря, тем меньше частота вращения электродвигателя.
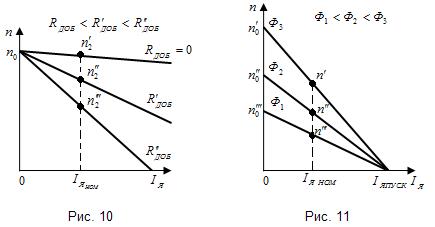
При неизменном напряжении питающей сети и неизменном магнитном потоке в процессе изменения значения сопротивления якорной цепи можно получить семейство частотных характеристик, например, для электродвигателя с параллельным возбуждением (рис. 10).

Преимущество рассмотренного способа регулирования заключается в его относительной простоте и возможности получить плавное изменение частоты вращения в широких пределах (от нуля до номинального значения частоты nном). К недостаткам этого способа следует отнести то, что имеют место значительные потери мощности в добавочном сопротивлении, увеличивающиеся с уменьшением частоты вращения, а также необходимость использования дополнительной регулирующей аппаратуры. Кроме того, этот способ не позволяет регулировать частоту вращения электродвигателя вверх от ее номинального значения.
Изменения частоты вращения электродвигателя постоянного тока можно достигнуть и в результате изменения значения магнитного потока возбуждения. При изменении магнитного потока в соответствии с уравнением частотной характеристики для двигателей постоянного тока с параллельным возбуждением при постоянном значении напряжения питающей сети и неизменном значении сопротивления якорной цепи можно получить семейство частотных характеристик (рис. 11), выходящих из одной точки, соответствующей Iя пуск.
Как видно из этих характеристик, с уменьшением магнитного потока частота вращения идеального холостого хода электродвигателя no возрастает. Так как при частоте вращения, равной нулю, ток якоря электродвигателя, т. е. пусковой ток, не зависит от магнитного потока, то частотные характеристики семейства не будут параллельными друг другу, причем жесткость характеристик уменьшается с уменьшением магнитного потока (увеличение магнитного потока двигателя обычно не производится, так как при этом ток обмотки возбуждения превышает допустимое, т. е. номинальное его значение). Таким образом, изменение магнитного потока позволяет регулировать частоту вращения электродвигателя только вверх от номинального ее значения, что является недостатком данного способа регулирования. К недостаткам этого способа следует отнести также относительно небольшой диапазон регулирования вследствие наличия ограничений по механической прочности и коммутации электродвигателя.
Преимуществом данного способа регулирования является его простота. Для двигателей с параллельным возбуждением это достигается изменением сопротивления регулировочного реостата Rр в цепи возбуждения для изменения потока Ф.
У двигателей постоянного тока с последовательным возбуждением изменение магнитного потока достигается шунтированием обмотки возбуждения сопротивлением, имеющим соответствующее значение, либо замыканием накоротко определенного количества витков обмотки возбуждения.
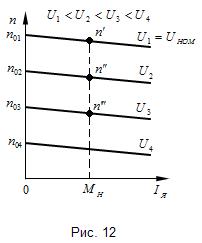
Широкое применение, особенно в электроприводах, построенных по системе генератор — двигатель, получил способ регулирования частоты вращения путем изменения напряжения на зажимах якоря двигателя. При постоянных магнитном потоке и сопротивлении якорной цепи в результате изменения напряжения на якоре можно получить семейство частотных характеристик.
В качестве примера на рис. 12 представлено такое семейство частотных характеристик для электродвигателя с параллельным возбуждением.
С изменением подводимого напряжения частота вращения идеального холостого хода n0 в соответствии с приведенным ранее выражением изменяется пропорционально напряжению. Так как сопротивление цепи якоря остается неизменным, то жесткость семейства механических характеристик не отличается от жесткости естественной механической характеристики при U = Uном.
Преимуществом рассмотренного способа регулирования является широкий диапазон изменения частоты вращения без увеличения потерь мощности. К недостаткам данного способа следует отнести то, что при этом необходим источник регулируемого питающего напряжения, а это приводит к увеличению массы, габаритов и стоимости установки.
Задание по работе
1. Ознакомиться с устройством и конструкцией исследуемого электродвигателя постоянного тока с параллельным возбуждением.
2. Снять и построить рабочие, механическую и частотную характеристики электродвигателя постоянного тока с параллельным возбуждением.
3.Составить краткие выводы по работе.
Методические указания по выполнению работы
1. Ознакомиться на демонстрационном стенде «Машины по-
стоянного тока» с устройством электродвигателя постоянного
тока, а на лабораторном стенде — с приборами, аппаратами и
подлежащим испытанию электродвигателем. Записать в отчет по
лабораторной работе технические паспортные данные двигателя:
Тип электродвигателя1.................................. П-21
Номинальная мощность (Pi „„„), кВт.............. 1,5
Номинальное напряжение (t/ном), В.............. 220
Номинальная частота вращения (пти), об/мин 3000
Номинальный ток (/но.м), А.............................. 8,8
Номинальный КПД (т|„0м).............................. 0,77
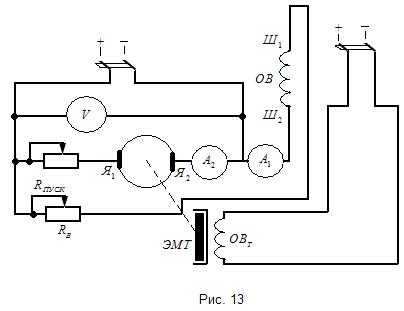
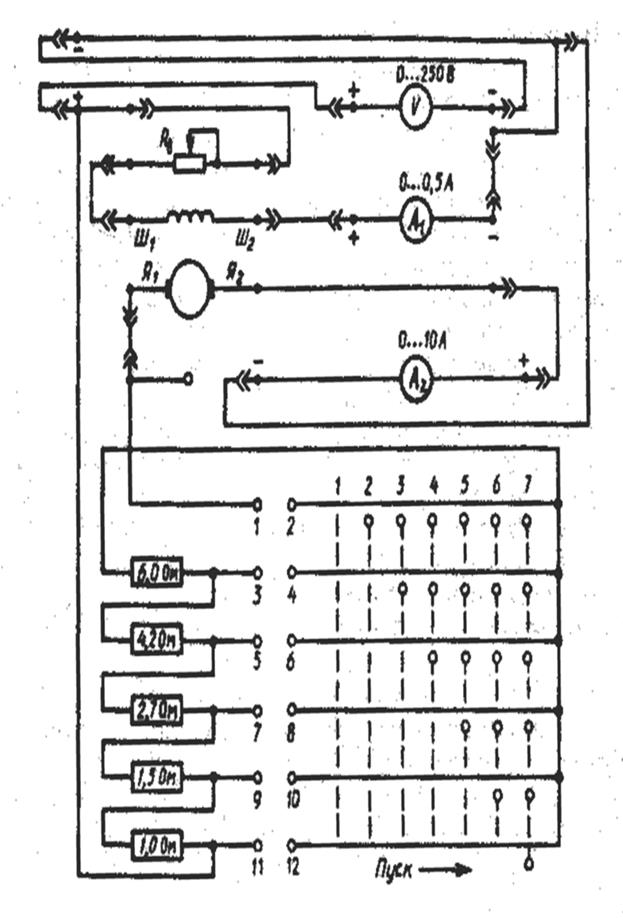
2. На рабочей панели стенда «Двигатель постоянного тока» в
соответствии с принципиальной схемой рис. 13 собрать электрическую цепь для снятия характеристик электродвигателя постоянного тока параллельного возбуждения. Монтаж электрической цепи проводить согласно монтажной схеме, В качестве нагрузки на валу испытуемого электродвигателя используется электромагнитный тормоз, тормозной момент которого изменяется при изменении тока в его обмотках
возбуждения с помощью регулируемого источника постоянного напряжения. Управление тормозом проводится рукояткой «Момент нагрузки электродвигателей», расположенной на панели«Нагрузочные устройства».
Измерение момента на валу и частоты вращения якоря электродвигателя проводить измерительными приборами (агрегат № 2), расположенными на приборной панели.
Перед пуском исследуемого электродвигателя необходимо убедиться в том, что:
а) сопротивление пускового реостата полностью введено (ручка пускового реостата находится в крайнем левом положении — цепь якоря двигателя разомкнута);
б) сопротивление реостата в цепи обмотки возбуждения электродвигателя полностью выведено (ручка реостата «Регулировка возбуждения» находится в крайнем правом положении);
в) напряжение, подводимое к цепи обмотки возбуждения электромагнитного тормоза, равно нулю (ручка «Момент нагрузки электродвигателей» находится в крайнем левом положении);
г) значение питающего напряжения электродвигателя уста
новлено равным номинальному его значению Uном = 220 В. Уста
новка питающего напряжения проводится кнопками «вверх» и «вниз» на
панели «Нагрузочные устройства» при предварительно нажатой
кнопке «Вкл» на панели «Машины постоянного тока»;
д) нажатием кнопки «Агрегат № 2» на панели «Нагрузочные
устройства» включено напряжение питания электрической цепи
измерения момента и частоты вращения якоря электродвигателя.
3. Провести пуск электродвигателя плавным переключением пускового реостата из положения «1» в — «7» с выдержкой времени в каждом промежуточном положении в течение 1 ...1,5 с. После окончания процесса пуска, когда частота вращения якоря двигателя принимает установившееся значение, пусковой реостат полностью должен быть выведен (рукоятка пускового реостата должна быть в крайнем правом положении — положении «7»).
|
Рис. 14
4. Снять механическую п(М), частотную п(Iя) и рабочие характеристики электродвигателя — n(Р2), М(Р2), Iя(P2), η(Р2)
Для этого:
а) осуществить загрузку электродвигателя с помощью электромагнитного тормоза; изменение момента электромагнитного тормоза должно проводиться плавно; в начале опыта устанавливается ток возбуждения, при котором при номинальных питающем напряжении и токе, потребляемом двигателем, частота вращения якоря равна номинальной; это значение тока возбуждения
двигателя принимается равным номинальному; в процессе проведения опыта этот ток необходимо поддерживать неизменным;
б) первые точки характеристик снимаются при холостом ходе
электродвигателя, т. е. при уменьшенном до нуля моменте электромагнитного тормоза;
в) постепенно нагружая электродвигатель до значения тока,
равного Iя = 1,2Iя ном, провести регистрацию показаний всех измерительных приборов для шести-семи точек (включая точку номинального режима). Данные наблюдений записать в табл.1
Таблица. 1
| Номера измерений | Измерения | Вычисления | ||||||
| U, В | Iя, А | Iв, А | n об/мин | M,Нм | I, А | P1, Вт | P2, Вт | |
5) Обработка результатов измерений:
а) по результатам измерений п. 4 построить механическую п(М) и частотную n(Iя) характеристики электродвигателя;
6) по результатам измерений и вычислений п. 4 построить в одной координатной системе рабочие характеристики двигателя, т. е. зависимости момента М, частоты вращения якоря п, тока
якоря Iя и КПД η от полезной мощности Р2 на валу электродвигателя при постоянном номинальном значении напряжения U = Uном = const и постоянном токе возбуждения, равном номинальному его значению Iном = const.
Вычислить расчетные значения величин: тока, потребляемого электродвигателем,
I = Iя + Iв;
мощности, потребляемой электродвигателем, кВт,
P1 = UI;
полезной мощности на валу электродвигателя
Р2 = Мп/9950,
где Р2 — мощность, кВт; М — момент, Н-м (1 кГ-м = 9,81Н-м); п — частота вращения якоря, об/мин; коэффициента полезного действия электродвигателя
η = P2/P1
Дата добавления: 2015-07-30; просмотров: 1306;