Биомеханические цепи
Количество соединений звеньев и число степеней свободы живого организма определяемое как общее число возможных независимых перемещений частей тела намного превышает то, с чем имеет дело теория механизмов и машин.
Ясно, что нервно-мышечное управление движениями, состоящее в ограничении этих степеней свободы, должно сильно отличаться от системы управления в технике. Своеобразие процессов управления движениями человека или животного обусловлено также особенностями мышечной системы как системы двигателей, преодолевающих избыточные степени свободы. Мышцы разнообразны по форме, размерам, особенностям прикрепления, величине
|

|
максимально развиваемого усилия, не обладают обратным действием. Количество мышц превышает число звеньев тела. Каждая мышца состоит из большого числа двигательных единиц и каждая единица управляется через собственный мотонейрон (рис. 13.1).
Основной функцией каждой мышцы, состоящей из поперечнополосатых мышечных волокон, является сократимость.
Начинаются и прикрепляются мышцы чаще всего на костях, значительно реже на хрящах, фасциях, сухожилиях. Концы мышцы, как правило, состоят из фиброзных соединительнотканных пучков и лишь иногда бывают мышечными. Если один или оба соединительнотканных конца мышцы имеют вид тяжа с поперечным сечением в форме овала или круга, говорят о сухожилии, если же конец мышцы представлен в виде фиброзного листка или пластинки, его называют сухожильным растяжением, или апоневрозом.
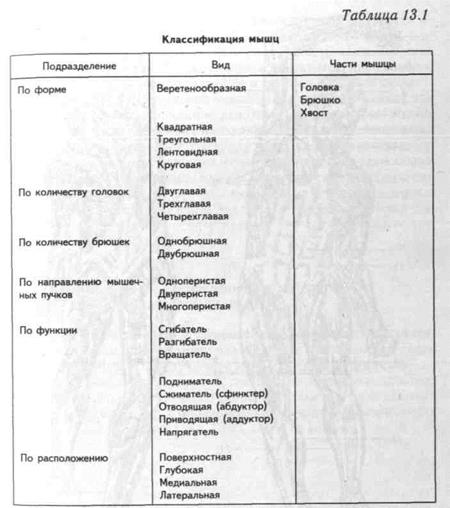
В организме насчитывается около 600 произвольных мышц, различных по форме, строению, развитию и функциям, в связи с чем классификация мышц (табл. 13.1) представляет большие затруднения. По форме различают мышцы плоские, длинные, квадратные, трапециевидные, ромбовидные и др.
Большинство длинных мышц имеет брюшко, но есть мышцы двубрюшные (с сухожильной перемычкой на протяжении), двуглавые, трехглавые и четырехглавые.
Направление мышечных пучков различно. В мышцах, сохранивших свое эмбриональное положение, мышечные пучки следуют либо строго продольно, либо косо. В сместившихся мышцах различают направления пучков: поперечное, косое, продольное, одно- и двуперистое (см. рис. 13.3).

|
Сокращение мышц приводит в движение части скелета — рычаги с точками опоры в области суставов. Второй силой, воздействующей на эти рычаги, служит сила тяжести или какое-либо другое сопротивление. В теле человека, как и в механике вообще, принято различать рычаги первого и рычаги второго рода.
Если мышцы или отдельные мышечные группы оказывают при сокращении противоположное действие (сгибание, разгибание и т. п.), они носят название антагонистов. Мышцы, выполняющие однотипные движения, получили название синергистов. Однако работа мышц-антагонистов и синергистов весьма разнообразна: мышцы, являющиеся для одного движения синергистами, для другого вида движений того же самого звена могут быть антагонистами (например, лучевой и локтевой сгибатели запястья при сгибании кисти являются синергистами, а при отведении и приведении — антагонистами).
Дата добавления: 2015-07-24; просмотров: 2017;