Описание моделируемого объекта
Моделируемый дифференциальный трансформаторный индуктивный преобразователь прямоходного типа (далее «ДТИП») схематически изображен на рис. 2.1. ДТИП состоит из подвижного цилиндрического магнитного якоря 1, перемещающегося внутри электроизоляционного (пластикового) каркаса 6 катушки в направлении оси его симметрии. На каркасе катушки равномерно размещена первичная обмотка (обмотка возбуждения) 3 с числом витков N1, разбитая на две одинаковых полуобмотки с числом витков N1/2 каждая. Поверх первичной обмотки размещены две вторичные (индуктивные) обмотки: верхняя 4 и нижняя 5 с одинаковым числом витков N2 каждая, соединенные последовательно встречно.
Вся конструкция помещена в кожух 2 из магнитомягкого материала. Кожух выполняет несущую и защитную функции, но главным его назначением является замыкание магнитного потока якоря F0 вокруг катушки.
При подаче на первичную обмотку 3 переменного напряжения U, которое будем называть напряжением питания, во вторичных обмотках 4 и 5 наводится соответственно ЭДС Е1 и ЭДС Е2. В реальных ДТИП эти ЭДС выпрямляются и сглаживаются. Если геометрический центр якоря 1 находится в геометрическом центре катушки с обмотками 3, 4 и 5, то ЭДС, наведенные в обмотках 4 и 5, одинаковы (Е1 = Е2). Их разностный выпрямленный сигнал ΔЕ = Е1 – Е2 равен нулю. При перемещении якоря, например вверх на величину D, изменяется конфигурация магнитной системы, так что степень взаимной индуктивной связи обмотки 3 с обмоткой 4 увеличится, а с обмоткой 5 уменьшится. При этом разностный сигнал ΔЕ
будет положительным (ΔЕ = Е1 – Е2 >0).
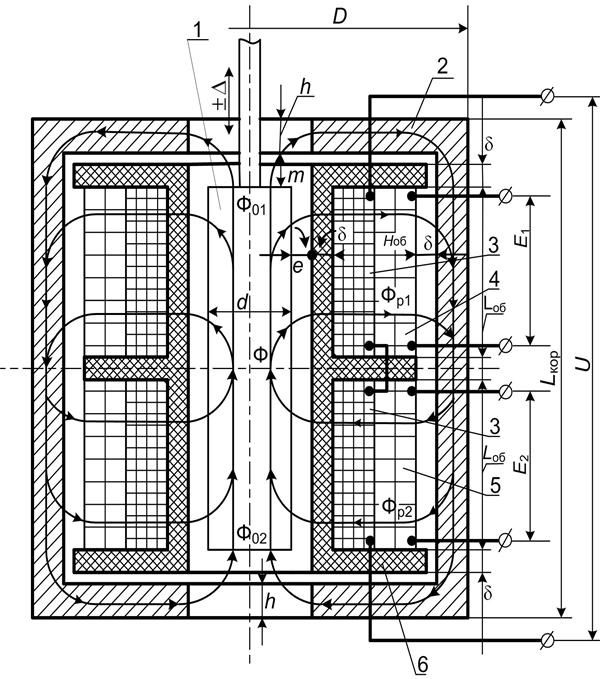
Рис. 2.1. Моделируемый ДТИП:
1 – подвижный якорь из магнитомягкого материала; 2 – кожух из магнитомягкого материала; 3 – две полуобмотки первичной электрической обмотки (обмотка возбуждения); 4 и 5 – две вторичные электрические индуктивные обмотки; 6 – каркас катушки из электроизоляционного материала
С увеличением перемещения D значение сигнала DЕ будет возрастать. Если якорь переместится вниз от геометрического центра, то степень взаимоиндуктивной связи обмотки 3 с обмоткой 4 уменьшится, а с обмоткой 5 увеличится. При этом разностный сигнал DЕ станет отрицательным (DЕ < 0) и с увеличением перемещения D значение сигнала DЕ будет уменьшаться.
ДТИП предназначен для преобразования линейного перемещения якоря в напряжение. Функция преобразования ДТИП имеет вид
ΔЕ = f(Δ). (2.1)
Она является практически линейной функцией типа
DЕ = SD, (2.2)
где S – чувствительность ДТИП, в относительно небольшой области определения аргумента D.
Область определения аргумента функции (2.2) ограничивается неравенством
|D| £ Dлин, (2.3)
где Dлин – граница линейности функции (2.2).
Выход значений аргумента D за пределы области определения (2.3) приводит к проявлению нелинейности функции (2.1), благодаря краевым эффектам.
Дата добавления: 2015-07-22; просмотров: 836;