Основные виды САУ
В зависимости от принципа и закона функционирования ЗУ, задающего программу изменения выходной величины, различают основные виды САУ:
- стабилизации;
- программные;
- следящие;
- самонастраивающиеся:
- экстремальные;
- оптимальные;
- адаптивные.
В системах стабилизации (рис.2.9,2.10) обеспечивается неизменное значение управляемой величины при всех видах возмущений, т.е. y = const. ЗУ формирует эталонный сигнал, с которым сравнивается выходная величина. ЗУ, как правило, допускает настройку эталонного сигнала, что позволяет менять по желанию значение выходной величины.
В программных системах обеспечивается изменение управляемой величины в соответствии с программой, формируемой ЗУ. В качестве ЗУ может использоваться кулачковый механизм, устройство считывания с перфоленты или магнитной ленты и т.п. К этому виду САУ можно отнести заводные игрушки, магнитофоны, проигрыватели и т.п. Различают системы с временной программой (например, рис.2.1), обеспечивающие y = f(t), и системы с пространственной программой, в которых y = f(x), применяемые там, где на выходе САУ важно получить требуемую траекторию в пространстве, например, в копировальном станке (рис.2.11), закон движения во времени здесь роли не играет, где t – время, х – координата точки.
Рисунок 2.11 – САУ с пространственной программой.
Следящие системы отличаются от программных лишь тем, что программа y = f(t) или y = f(x) заранее неизвестна. В качестве ЗУ выступает устройство, следящее за изменением какого-либо внешнего параметра. Эти изменения и будут определять изменения выходной величины САУ. Например, рука робота, повторяющая движения руки человека.
Все три рассмотренных вида САУ могут быть построены по любому из трех фундаментальных принципов управления. Для них характерно требование совпадения выходной величины с некоторым предписанным значением на входе САУ, которое само может меняться. То есть в любой момент времени требуемое значение выходной величины определено однозначно.
В самонастраивающихся системах ЗУ ищет такое значение управляемой величины, которое по какому-то критерию (или нескольким) является оптимальным.
Так, в экстремальных системах (рис.2.12) требуется, чтобы выходная величина всегда принимала минимальное или максимальное значение из всех возможных, которое заранее не определено и может непредсказуемо изменяться. Для его поиска система выполняет небольшие пробные движения и анализирует реакцию выходной величины на эти пробы.
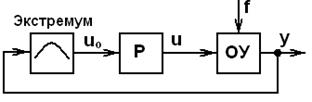
Рисунок 2.12 – Самонастраиваемая САУ.
После этого вырабатывается управляющее воздействие, приближающее выходную величину к экстремальному значению. Процесс повторяется непрерывно. Так как в данных САУ происходит непрерывная оценка выходного параметра, то они выполняются только в соответствии с третьим принципом управления – принципом обратной связи.
Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило, сложная обработка информации о характере изменения выходных величин и возмущений, о характере влияния управляющих воздействий на выходные величины, может быть задействована теоретическая информация, информация эвристического характера и т.п. Поэтому основным отличием экстремальных систем является наличие в них ЭВМ. Эти системы могут работать в соответствии с любым из трех фундаментальных принципов управления.
В адаптивных системах предусмотрена возможность автоматической перенастройки параметров или изменения принципиальной схемы САУ с целью приспособления ее к изменяющимся внешним условиям.
Контрольные вопросы к главе 2.
1. Что называется системой автоматического управления?
2. Что является основной задачей автоматического управления?
3. Что называется управляемой величиной?
4. Что называется управляющим органом?
5. Что называется чувствительным элементом?
6. Что такое входная и выходная величины?
7. Что называется управляющим воздействием?
8. Что называется возмущением?
9. Что называется отклонением от заданной величины?
10. Что называется управляющим устройством?
11. Что называется задающим устройством?
12. Что называется функциональной схемой и из чего она состоит?
13. В чем отличие сигнала от физической величины?
14. В чем суть принципа разомкнутого управления?
15. В чем суть принципа компенсации?
16. В чем суть принципа обратной связи?
17. Что такое отрицательная обратная связь?
18. Перечислите достоинства и недостатки принципов управления?
19. Какой частный случай управления называется регулированием?
20. В чем отличие систем прямого и непрямого регулирования?
21. Дайте определение многоконтурной системы.
22. Дайте определение САУ стабилизации.
23. Дайте определение программной САУ.
24. Дайте определение следящей САУ.
25. Дайте определение самонастраивающейся САУ.
Дата добавления: 2015-07-14; просмотров: 1182;