ПРИМЕНЕНИЕ НАЗЕМНЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Понятие о радиолокации. Под радиолокацией (от «радио» и location (лат.) – определять местоположение) в широком смысле слова понимают способы определения местоположения и характеристик объектов с помощью радиоволн. В этом смысле к радиолокации можно отнести и принцип работы радиовысотомера (определяет расстояние до земли по отражению от нее радиоволн), и работу ДИСС (измеряется скорость приближения земной поверхности). Но, как правило, под радиолокацией понимают применение радиолокационных станций (РЛС) или, более кратко, радиолокаторов. Это устройства, устанавливаемые на земле (наземные РЛС) или на борту (бортовые РЛС), с помощью которых можно не только измерять координаты объекта (пеленг, дальность), но и получать информацию в наглядном графическом виде на экране электронно-лучевой трубки, то есть видеть изображение местности или изображение расположения ВС в зоне действия РЛС.
На английском языке радиолокатор называют Radar (Radio Detection and Ranging – радиообнаружение и определение дальности). Рассмотрим кратко и в самом общем виде принцип действия радиолокатора.
Одним из основных элементов классического радиолокатора является электронно-лучевая трубка (ЭЛТ), аналогичная тем, которые используются в старых телевизорах. Разумеется, в современных условиях развития цифровой и электронной техники она может быть заменена и другими устройствами (плазменными и жидкокристаллическими панелями, например), но мы рассмотрим принцип работы на примере традиционного локатора.
ЭЛТ имеет экран, покрытый флюоресцирующим составом. Это означает, что если в какое-то место экрана направить поток электронов, то это место начнет светиться. Причем, будет продолжать светиться, постепенно затухая, и после прекращения излучения (явление послесвечения). За экраном расположена так называемая электронная пушка, которая формирует очень узкий пучок излучаемых электронов. Направление этого луча электронов можно изменять с помощью системы электромагнитов. Ведь электроны являются заряженными частицами, и в магнитном поле на них действует сила, искривляющая траекторию движения электрона.
Передатчик РЛС излучает мощные электромагнитные импульсы по узкой диаграмме направленности, то есть в определенном направлении. В момент излучения каждого импульса на экране ЭЛТ начинается развертка. Это означает, что «линия прицеливания» электронной пушки начинает равномерно смещаться от центра экрана (точки начала развертки) к его краю (рис. 8.1). Направление смещения на экране соответствует тому, куда направлена диаграмма антенны РЛС в данный момент времени. Но электроны при этом не излучаются. И лишь когда антенна примет отраженный импульс от объекта, пушка «выстрелит» электронами. И в том месте, куда линия прицеливания была в этот момент направлена, на экране появится светящаяся точка. Расстояние этой точки от начала развертки будет пропорционально удалению объекта от локатора. Ведь чем дальше объект, тем больше прошло времени от момента излучения до приема отраженного импульса, и тем на больший угол θ отклонилась линия прицеливания от начала развертки (см. рис.8.1).
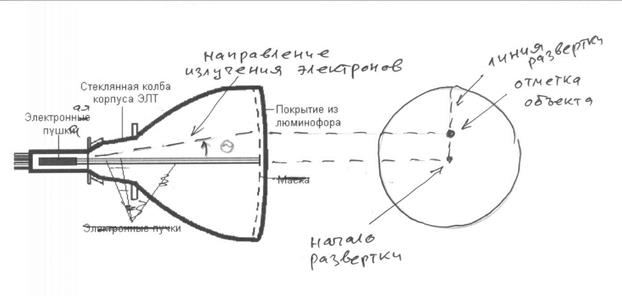
Рис. 8.1. Формирование изображения на экране РЛС
Если объект не точечный, а протяженный, то рядом будут еще точки на той же линии развертки, на расстояниях, соответствующих их удалению от локатора. Они сольются вместе и образуют на экране черту – как бы сечение объекта по данному направлению.
Но антенна не является неподвижной. Она либо вращается в горизонтальной плоскости вокруг вертикальной оси (круговые РЛС), либо сканирует вправо-влево (а у посадочного локатора – вверх-вниз) в определенном секторе. Поэтому в каждый момент времени антенна излучает в разном направлении и на экране получается множество сечений объекта по всем направлениям, проходящим от антенны через объект. Благодаря послесвечению изображений все эти сечения остаются на экране одновременно, сливаются вместе и формируют светящееся пятно такой же формы, как облучаемый объект.
Независимо от того, пришел ли отраженный сигнал от какого-либо объекта, электронная пушка «выстреливает» электроны через определенные интервалы времени, которые соответствуют определенному расстоянию (10, 50, 100 км). При этом на линии развертки образуется точка, а из-за вращения антенны соответствующие точки на экране сливаются и превращаются в окружности определенного радиуса, называемые метками дальности (рис. 8.2). Все точки на каждой окружности соответствуют определенной дальности от РЛС.
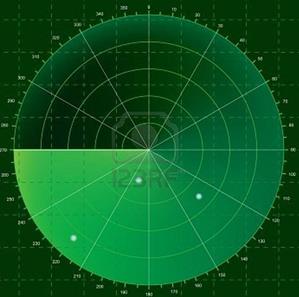
Рис. 8.2. Схематический вид экрана РЛС кругового обзора
Виды и применение наземных РЛС. По своему назначению наземные РЛС, используемые для выполнения полета, могут быть разделены на обзорные трассовые, обзорные района аэродрома и посадочные. Конечно, существуют также радиолокаторы метеорологические (для наблюдения за погодой) и радиолокаторы для наблюдения за рулением ВС на площади аэродрома, но здесь мы их рассматривать не будем.
Кроме посадочных, все перечисленные РЛС являются радиолокаторами кругового обзора, то есть антенна вращается на 360° и можно наблюдать объекты по всем направлениям от РЛС (рис. 8.3).
Обзорные трассовые радиолокаторы (ОРЛ-Т) предназначены для управления воздушным движением на трассах, во внеаэродромном воздушном пространстве. Поскольку РЛС работают в УКВ-диапазоне, их максимальная дальность действия зависит не только от мощности передатчика, но и от высоты полета ВС, а также высоты расположения антенны РЛС (поэтому их стараются установить на возвышенность). Максимальная дальность может достигать 450-500 км, хотя обычно меньше, особенно для ВС, летящих не на слишком больших высотах.
По азимутальной градуировке экрана диспетчер может определить направление на ВС (пеленг), а по меткам дальности – удаление до него. На экране РЛС могут быть нанесены маршруты полетов, зоны УВД и другая информация (рис. 8.4). В современных системах УВД такого рода информация формируется электронным путем. Поэтому диспетчер может сообщить экипажу не только пеленг и дальность, но и другую информацию, например линейное боковое уклонение от ЛЗП.

Рис. 8.3. Первичный радиолокатор Амур

Рис. 8.4. Индикатор наземной РЛС
Для применения трассовых РЛС важно помнить, что они ориентированы по истинному меридиану, следовательно, диспетчер при полете вне района аэродрома дает экипажу истинные пеленги самолета и дальность. При этом используется термин «азимут». Например,
«Аэрофлот-411, Самара-Контроль, азимут 120, удаление 80».
Таким образом, при работе с диспетчером районного центра УВД, управляющим движением по трассам, под азимутом понимается истинный пеленг самолета от меридиана радиолокатора. Это совпадает с применением автоматических пеленгаторов при полете по трассе – там также ПП и ОП обозначали истинные пеленги. Это облегчает прокладку ЛРПС на карте. Но несколько усложняет контроль пути по направлению (при полете на или от РЛС) – пеленг нужно сравнивать с заданным истинным путевым углом.
Обзорный радиолокатор района аэродрома (ОРЛ-А) часто называют диспетчерским радиолокатором. Это также локатор кругового обзора, но может иметь меньшую мощность, поскольку предназначен для УВД в районе аэродрома (обычно в радиусе 70-100 км). Его экран выглядит похоже на экран трассового локатора. На нем могут быть нанесены схемы вылета, прибытия, захода на посадку. Диспетчер может определить пеленг ВС (также обозначаемый словом «азимут») и удаление ВС. Но важно помнить, что для радиолокаторов района аэродрома под термином «азимут» понимается магнитный пеленг, поскольку такие локаторы при их установке ориентируются по магнитному меридиану.
Применение и точность наземных РЛС. Наземные радиолокаторы, также как и наземные радиопеленгаторы, являются не средствами навигации, а средствами обслуживания воздушного движения. Они предназначены для диспетчера. Но получив от диспетчера пеленг и дальность, экипаж может их использовать таким же образом, как и пеленг и дальность, полученные от любой навигационной УДРНС (РСБН, VOR/DME и т.п.).
Точность измерения пеленга и дальности довольно высока и у современных РЛС СКП измерения пеленга составляет порядка 0,1-0,2° , а дальности 60-150 м. Но это именно точность измерения. В полной мере она может быть использована только при цифровой обработке полученных сигналов, например, в автоматизированных системах УВД (АС УВД). Эта точная информация используется АС УВД для предотвращения опасных сближений ВС и решения других задач. Если же речь идет о графическом представлении информации на экране РЛС для диспетчера, то точность определения координат, конечно, хуже. Диспетчер вряд ли может отсчитать пеленг на экране точнее, чем 1°. А точность определения дальности зависит от интервала, через который на экране формируются метки дальности. Ведь если отметка ВС находится между метками дальности (окружностями, соответствующими одинаковому удалению от РЛС), то диспетчеру приходится интерполировать дальность «на глаз». Если, например, метки проведены через каждые 10 км, то при интерполяции легко ошибиться на 1-2 км. А если интервал между метками 50 км, то погрешность интерполяции будет гораздо больше. Приближенно можно считать, что информация о пеленге и дальности, которую пилот получает от диспетчера, характеризуется СКП по пеленгу около 1° , а по дальности 1-3 км. Это не очень высокая точность и она сравнима с точностью традиционных бортовых средств.
Вместе с тем, достоинством наземных РЛС является именно независимость от бортовых средств. При использовании бортовых систем пилот может допустить ошибку, которая приведет к получению неверной информации. А информация от диспетчера является более объективной, поскольку радиолокатор «видит», где ВС находится на самом деле. В то же время нельзя забывать, что наземным радиолокатором пользуется тоже человек (диспетчер), который также может допустить ошибку (например, перепутать метки двух ВС на экране).
Вторичная радиолокация. Радиолокаторы, принцип которых рассмотрен выше, называют первичными радиолокаторами (Primary Surveillance Radar). При их использовании МС определяется с помощью отраженного от ВС сигнала. Но такой принцип имеет недостатки. Чем дальше объект и чем меньше он по размерам, тем слабее от него сигнал. Кроме того, невозможно узнать, от какого именно самолета отразился сигнал, то есть нельзя опознать ВС. Кстати, по этой причине иногда диспетчер просит экипаж выполнить какой-нибудь маневр (например, отворот в сторону от ЛЗП), чтобы по движению метки на экране опознать именно данное ВС.
Вторичные радиолокаторы (ВРЛ) или по-английски Secondary Surveillance Radar (SSR) принимают не отраженный сигнал, а переданный самим объектом (самолетом). В состав наземного ВРЛ входит запросчик, включающий в себя передатчик и приемник, а на борту ВС устанавливается ответчик (transponder). Запросчик излучает импульсы радиоволн, транспондер (ответчик) принимает их и отвечает последовательностью импульсов, в которых закодирована определенная информация о ВС. Антенна ВРЛ получает ответный сигнал и вместе с ним переданную информацию.
Запросчик ВРЛ передает импульсы на частоте 1030 МГц, а транспондер отвечает на частоте 1090 МГц.
Достоинством вторичной радиолокации является возможность увеличить максимальную дальность действия при той же мощности излучения, меньшие размеры антенны и, конечно, возможность получения кроме МС еще и дополнительной информации (рис. 8.5).

Рис. 8.5. Вторичный радиолокатор Крона
ВРЛ может работать в различных режимах. В гражданской авиации наиболее часто используются режимы А (Mode A) и режим С (Mode C).
В режиме А транспондер в своем ответном сигнале передает так называемы «сквок код» (squawk code). Это четырехзначный номер, присваиваемый органами ОВД каждому ВС индивидуально. Пилот выставляет его на органах управления транспондером (рис. 8.6), а диспетчер с его помощью может узнать, отметку какого именно ВС он видит на экране. Для этого пилот по просьбе диспетчера нажимает кнопку «IDENT» и отметка ВС на экране локатора подсвечивается или мигает в течение нескольких секунд.

Рис. 8.6. Транспондер (ответчик)
Если никакой номер не присвоен, то при полетах в Европе устанавливается сквок 7000, а в Европе 1200.
Сквок-код используется и в нештатных ситуациях. Видимо этим и объясняется использование слова squawk, которое означает пронзительный крик птицы (вообще, squaw – индейка), резкую жалобу, протест. В ситуации бедствия пилот устанавливает код 7700, при потере радиосвязи 7600, а при нападении на экипаж (Hijack) 7500.
В режиме С, кроме сквок-кода, с борта на землю передается еще и высота полета. Высота поступает в транспондер от одного из бортовых высотомеров, причем всегда по стандартному давлению независимо от того, какое давление установлено на самом высотомере.
В настоящее время во всем мире внедряется еще один режим – режим S (Mode S). В этом режиме кроме кода и высоты может передаваться много другой полезной информации: бортовой номер ВС, его позывной, заводской номер транспондера, скорость полета, координаты ВС, полученные на борту ВС с помощью спутниковой навигационной системы… Всю эту информацию диспетчер может видеть в виде формуляра рядом с отметкой ВС на экране (рис. 8.7).
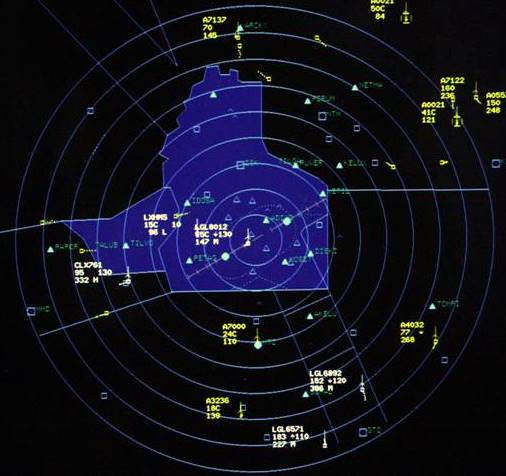
Рис. 8.7. Отображение информации ВРЛ
Автоматическое зависимое наблюдение. Если с борта ВС передаются точные координаты, полученные по СНС, то в принципе отпадает необходимость измерять пеленг и дальность ВС с помощью радиолокатора. Ведь координаты от спутников в сотни раз точнее. В этом случае сам локатор уже не нужен, достаточно принимать только сигнал бортового ответчика и по его информации нанести на экран отметку места самолета вместе со всеми его данными. Это называется уже не радиолокацией, а автоматическим зависимым наблюдением - АЗН (automatic dependent surveillance, ADS). Зависимым оно называется потому, что информация о МС поступила в готовом виде с борта ВС (то есть, она зависит от его навигационных систем), а не получена самим диспетчером с помощью РЛС.
С помощью АЗН диспетчер может иметь информацию о движении ВС в удаленных районах, где нет никаких наземных радиолокаторов.
При наличии на борту соответствующего бортового оборудования АЗН получать информацию о ВС может не только диспетчер на земле, но и другие ВС. В этом случае каждое ВС будет иметь информацию о всех ВС, находящихся в районе его полета.
В связи с появлением АЗН изменилась и терминология, в том числе в документах ИКАО. В те времена, когда наблюдать за самолетами можно было только с помощью наземных локаторов, использовались термины типа «при наличии РЛК», «при отсутствии РЛК» (РЛК – радиолокационный контроль). Теперь же используются термины типа «при наличии наблюдения», «при отсутствии наблюдения». При этом под наблюдением (surveillance) понимается не только РЛК, но и АЗН.
Дата добавления: 2015-06-22; просмотров: 7454;