Общее диагностирование двигателя
Двигатель является наиболее сложным и важным агрегатом автомобиля, от состояния которого зависят многие технические, экономические и надежностные показатели работы.
Во время работы элементы двигателя подвергаются износу. Он проявляется в нарушении герметичности надпоршневого пространства, уплотнении головки блока цилиндров и т.п. В результате ухудшается наполнение цилиндров топливно-воздушной смесью, снижается давление сжатия и, как следствие, изменяется объемный к.п.д. двигателя, уменьшается развиваемая мощность и крутящий момент, ухудшается топливная экономичность, увеличивается расход моторного масла, повышается токсичность отработавших газов.
Неисправности и отказы по двигателю в основном возникают в кривошипно-шатунном и газораспределительном механизмах, системах питания, зажигания, охлаждения и смазки (табл.2.1).
А в целом общий вес отказов и неисправностей двигателей в общей структуре отказов автомобиля может достигать для отдельных моделей до 35…55% (табл.2.2)
Таблица 2.1 – Распределение неисправностей бензинового двигателя и трудоемкостей их устранения, %
| Механизмы и системы | Неисправности | Трудоемкости |
| 1. Кривошипно-шатунный механизм | ||
| 2. Газораспределительный механизм | ||
| 3. Система охлаждения | ||
| 4. Система смазки | ||
| 5. Система питания | ||
| 6. Система зажигания |
Таблица 2.2 – Распределение отказов и неисправностей по автомобилю МАЗ-5432, %
| Наименование узла, агрегата | Отказы и неисправности |
| 1. Двигатель и его системы | 46,9 |
| 2. Подвеска, колеса, шины | 12,4 |
| 3. Тормозная система | 10,4 |
| 4. Рулевое управление | 7,4 |
| 5. Коробка передач | 6,6 |
| 6. Центральный редуктор | 4,9 |
| 7. Сцепление | 4,4 |
| 8. Колесная передача | 2,7 |
| 9. Аккумуляторная батарея | 2,3 |
| 10. Карданная передача | 2,0 |
В связи со случайным характером возникновения отказов невозможно точно предугадать момент их наступления, поэтому целесообразно регулярно контролировать техническое состояние двигателя.
Для проверки работоспособности и прогнозирования безотказности работы автомобильного двигателя в соответствии с ГОСТ 23435-79 «Техническая диагностика. Двигатели внутреннего сгорания поршневые. Номенклатура диагностических параметров», используются параметры:
а) эффективная мощность двигателя (или изменение частоты вращения коленчатого вала при последовательном отключении из работы каждого из цилиндров, ускорение вращения коленчатого вала при разгоне без нагрузки, характеристики вибрации, шума или звука);
б) давление масла в главной масляной магистрали;
в) удельный расход топлива;
г) токсичность отработавших газов для бензиновых двигателей;
д) дымность отработавших газов для дизелей.
2.2.1 Диагностирование двигателя по эффективной мощности
Колесная мощность автомобиля снижается в процессе эксплуатации вследствие износа цилиндропоршневой группы, неисправностей газораспределительного механизма, систем питания, зажигания, охлаждения, смазки, состояния трансмиссии и ходовой части. Величина снижения мощности может достигать 10…15%.
Наиболее полно техническое состояние двигателя определяется экспериментально полученной внешней скоростной характеристикой. Однако в целях экономии топлива и времени достаточно снять одну ее точку. Как правило, это либо максимальная мощность, либо мощность на режиме максимального крутящего момента.
Для оценки эффективной мощности могут использоваться стенды тяговых качеств (СТК). Они предназначены для имитации работы автомобиля в различных скоростных и нагрузочных режимах и измерения тяговых показателей. Конструкция стендов включает опорно-приводные, нагрузочные и измерительные устройства. На стендах измеряются колесная мощность, параметры разгона и выбега, а при наличии топливного расходомера – часовой и удельный расход топлива на различных скоростных и нагрузочных режимах. Имитация дорожных условий осуществляется на опорно-приводных устройствах (ОПУ) ленточного или роликового типа. Наибольшее распределение получили роликовые устройства: одно-, двух-, трех- или четырехроликовые, т.к. при достаточной простоте их устройства они обеспечивают сопоставимые условия качения колеса на стенде и на дороге и удовлетворяют условию невыезда автомобиля со стенда при проведении испытаний.
Для автомобилей с колесной формулой 4х2 используются двухроликовые опорно-приводные устройства (одно под каждое одинарное или сдвоенное ведущее колесо). Принципиальная схема двухроликового стенда представлена на рис.2.3. Для автомобилей с колесной формулой 6х4 применяются трех- или четырехроликовые ОПУ.
Один ролик (ведущий) связан с нагрузочным устройством, а другой является поддерживающим. Ведущие ролики жестко связаны между собой с помощью валов и фланцевой муфты, чтобы обеспечить синхронное вращение ведущих колес. Отсутствие такой связи приведет к тому, что в работу будет включаться межколесный дифференциал, и второе ведущее колесо может просто остановиться и, поскольку в ведущих мостах автомобилей используются, как правило симметричные дифференциалы, крутящий момент на пером ведущем колесе тоже снизится до нуля. Замер колесной мощности в этом случае станет в принципе невозможным.
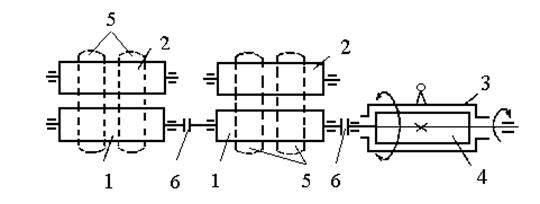
1 – ведущий ролик; 2 – поддерживающий ролик; 3 – статор балансирной машины; 4 – ротор; 5 – ведущие колеса автомобиля; 6 - соединительная муфта
Рисунок 2.3 – Схема двухроликового СТК с балансирным нагрузочным устройством
Связанное с ведущими роликами нагрузочное устройство служит для создания нагрузочного и скоростного режима диагностирования путем торможения роликов. Основные типы нагрузочных устройств представлены на рис.2.4.
| Нагрузочные устройства | |||||||
| Силовые | Инерционные | Инерционно-силовые | |||||
| Гидравлические | Электрические | Электродинамические | |||||
| Постоянного тока | Переменного тока | ||||||
Рисунок 2.4 – Классификация нагрузочных устройств
Все нагрузочные устройства состоят из ротора, соединенного с ведущим роликом и балансирно-подвижного статора, имеющего одну степень свободы, т.е. он может вращаться вокруг ротора (рис.2.3).
Создание тормозящего момента осуществляется: в гидравлическом тормозе за счет затрат энергии на перемещение воды между статором и ротором; в электрическом – за счет электромагнитных сил взаимодействия между статором и ротором; в электродинамическом – за счет взаимодействия электромагнитного поля статора и ротора. Электрические вихревые токи ротора возникают при его вращении в магнитном поле катушек статора.
Увеличение нагрузочного режима достигается большим заполнением гидротормоза водой – для гидротормозов; или увеличением силы тока статора для электрических нагрузочных устройств.
Каждое нагрузочное устройство имеет свою внешнюю характеристику (рис.2.5), которая ограничивает возможные поля нагрузок. Если на стенде будут диагностироваться различные автомобили с различными тяговыми усилиями – РТ, то должно использоваться нагрузочное устройство с более широким диапазоном нагрузок. При выборе СТК с тем или иным нагрузочным устройством необходимо помимо диапазона режимов учитывать и другие их характеристики: приведенную мощность для рассматриваемых нагрузочных устройств, определяемую отношением максимально поглощаемой мощности к их массе; приведенную стоимость нагрузочного устройства, определяемую отношением его стоимости к максимальной мощности; возможность прокручивания ведущих колес стендом для измерения потерь мощности в трансмиссии; надежность работы нагрузочного устройства; экономичность в эксплуатации.
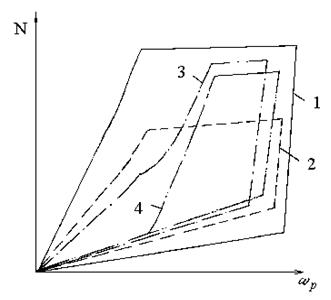
1 – электродинамический тормоз; 2 – электрический постоянного тока; 3 – гидравлический тормоз; 4 – электрический постоянного тока
Рисунок 2.5 – Внешняя характеристика нагрузочных устройств
Измерение тормозящего момента на СТК осуществляется с помощью измерительных устройств. Поглощаемая или колесная мощность Nk равна
Nk = Мр . wp / hс , (2.6)
где Мр – тормозящий момент на ролике, Н.м;
wp - частота вращения ролика, с-1;
hс – к.п.д. стенда.
Частоту вращения определяют, используя один из датчиков частоты вращения. Для определения крутящего момента исходят из следующих предположений. Под действием электромагнитных сил или под действием рабочей жидкости в гидротормозе, статор 1 стремиться повернуться в направлении вращения ротора 2 (рис.2.6). Сила действия Рр и плечо r , на котором она приложена, не известны. Для остановки статора к нему на плече l прикладывают уравновешивающую силу R. Статор будет поворачиваться до положения, пока уравновешивающий момент от измерительного устройства стенда (R × l) не станет равен моменту от сил взаимодействия статора и ротора (Рр × r).
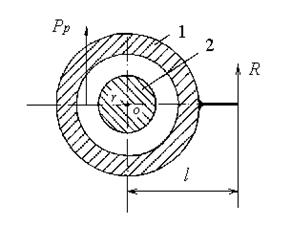
Рисунок 2.6 – Схема сил в балансирном тормозе
Плечо l задается конструкцией стенда (иногда принимается равным 1 м), а силу R измеряют с помощью датчика давления, пьезоэлектрических датчиков, маятниковых или квадратных динамометров. Например, маятниковый динамометр (рис.2.7) представляет собой двуплечный рычаг, к плечу а которого прикладывается измеряемая сила R, а на плече b устанавливается уравновешивающий груз известного постоянного веса Q. Рычаг поворачивается до момента уравновешивания, для которого можно записать
R×a×cosa = Q×b×sina . (2.7)
Откуда
R = Q×  × tga . (2.8)
× tga . (2.8)
Вес груза, b и а - известны и постоянны для каждого стенда. Таким образом, измеряемое усилие R пропорционально тангенсу угла отклонения маятника. Поэтому по углу поворота двуплечного рычага, указываемого стрелкой 3 на шкале 4, оценивают силу R и, с учетом длины плеча l , момент Мр .Далее по формуле (2.7) определяют колесную мощность.
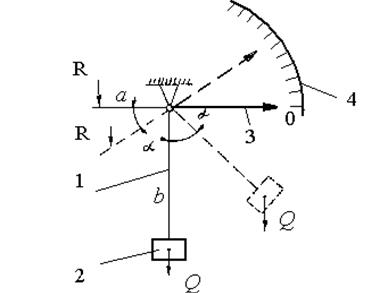
1 – двуплечный рычаг; 2 – уравновешивающий груз; 3 – стрелка; 4 – шкала динамометра
Рисунок 2.7 – Схема маятникового динамометра
При диагностировании необходимо, чтобы двигатель был прогрет, т.е. температура охлаждающей жидкости должна быть 75…85°С.
Косвенную оценку мощностных параметров двигателя дают бестормозные методы. Они основаны на использовании в качестве нагрузки двигателя механическими потерями при отключении цилиндров или силы инерции движущихся масс двигателя при разгоне коленчатого вала от частоты вращения холостого хода до максимальной.
При поочередном отключении i цилиндров измеряют частоту вращения холостого хода двигателя. Выключенные цилиндры нагружают двигатель за счет компрессирования в них топливно-воздушной смеси. Чем ниже мощность, развиваемая цилиндром, тем меньше изменяется частота вращения при его отключении:
Dwi = wн - wi , (2.9)
где wн – начальная частота вращения, с-1;
wi – частота вращения коленчатого вала при отключении i-го цилиндра, с-1.
При использовании инерционных масс двигателя быстро перемещают рычаг управления топливоподачей от минимального до максимального положения и оценивают интенсивность разгона коленчатого вала. Чем быстрее осуществляется разгон, тем выше эффективный крутящий момент. При измерениях автомобиль должен находиться на горизонтальной площадке с включенным стояночным тормозом и подсоединенным вентиляционным отсосом отработавших газов.
На этом принципе разработаны приборы (типа ИМД-2). Так как при работе на всех цилиндрах и полной топливоподаче ускорение достигает свыше 200 1/с2, наблюдается существенная деформация рабочего цикла. Поэтому метод дополняют отключением части цилиндров.
Параметры вибрации и шума тоже содержат большое количество информации о техническом состоянии различных элементов двигателя. При его работе создается широкий спектр звуковых колебаний, которые прослушиваются в определенных местах двигателя (рис.2.8). Они возникают вследствие стуков коренных и шатунных подшипников, поршневых пальцев, поршней, вибраций клапанов, колебания газов во впускном и выпускном трубопроводах, соударения различных деталей, трений в подвижных соединениях.
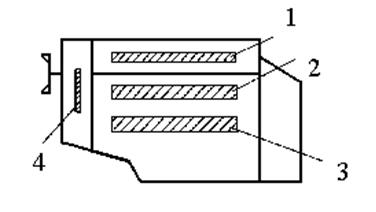
1 – зона клапанов; 2 – зона поршней; 3 – зона подшипников;
4 – зона шестерен газораспределения
Рисунок 2.8 – Зоны прослушивания двигателя
Стуки клапанов возникают при увеличении тепловых зазоров и хорошо прослушиваются на прогретом двигателе на малых оборотах. Стуки поршневых пальцев возникают при повышении зазора между пальцем и втулкой головки шатуна или отверстии для пальца в бобышке поршня более 0,1 мм. Они хорошо слышны при резко переменном режиме работы прогретого двигателя: это резкий металлический звук, пропадающий при выключении зажигания. Стуки поршня проявляются при износе поршня и цилиндра при недостаточно прогретом двигателе на частоте вращения холостого хода. Характер стука – сухой, щелкающий, уменьшающийся по мере прогрева двигателя. Стуки коренных и шатунных подшипников возникают при зазорах более 0,1…0,2 мм. Хорошо прослушиваются на прогретом двигателе. Характер стука – сильный, глухой, низкого тона. У шатунных подшипников – более резкий и звонкий, чем у коренных. Особенно явно слышны стуки при резком изменении частоты вращения коленчатого вала и практически исчезают при отключении зажигания (топливоподачи у дизелей).
Для оценки стуков применяются стетоскопы или стетофонендоскопы. Однако оценка технического состояния двигателя с их помощью является приближенной, зависящей от личного опыта механика, и не дает количественной оценки износов. Поэтому целесообразно использовать более современные виброаккустические методы контроля работоспособности. Они предполагают получение амплитудно-частотных характеристик шумов и их анализ. Максимальная амплитуда виброимпульсов и моменты их появления содержат информацию о зазорах в сопряжениях и о параметрах их работы. При этом используют два метода разделения сигналов спектра: временной и частотной. При временном – положение каждого сигнала отличается от положения последующего на некоторую величину времени и синхронизируется с каким-либо опорным событием, происходящим в механизме (например, положением поршня первого цилиндра в верхней мертвой точке, момент зажигания или впрыска). Выделение интересующих импульсов осуществляется с помощью стробатора – прибора, пропускающего через себя сигнал только в определенные промежутки времени.
При частотном – сигналы от различных элементов должны отличаться частотой или периодом их следования. Для их выделения используют частотные фильтры.
Дата добавления: 2015-04-07; просмотров: 4455;