Биомеханические цепи
Количество соединений звеньев и число степеней свободы живого организма определяемое как общее число возможных независимых перемещений частей тела намного превышает то, с чем имеет дело теория механизмов и машин.
Ясно, что нервно-мышечное управление движениями, состоящее в ограничении этих степеней свободы, должно сильно отличаться от системы управления в технике. Своеобразие процессов управления движениями человека или животного обусловлено также особенностями мышечной системы как системы двигателей, преодолевающих избыточные степени свободы. Мышцы разнообразны по форме, размерам, особенностям прикрепления, величине максимально развиваемого усилия, не обладают обратным действием. Количество мышц превышает число звеньев тела. Каждая мышца состоит из большого числа двигательных единиц и каждая единица управляется через собственный мотонейрон (рис. 13.1).
Основной функцией каждой мышцы, состоящей из поперечнополосатых мышечных волокон, является сократимость.
Начинаются и прикрепляются мышцы чаще всего на костях, значительно реже на хрящах, фасциях, сухожилиях. Концы мышцы, как правило, состоят из фиброзных соединительнотканных пучков и лишь иногда бывают мышечными. Если один или оба соединительнотканных конца мышцы имеют вид тяжа с поперечным сечением в форме овала или круга, говорят о сухожилии, если же конец мышцы представлен в виде фиброзного листка или пластинки, его называют сухожильным растяжением, или апоневрозом.
В организме насчитывается около 600 произвольных мышц, различных по форме, строению, развитию и функциям, в связи с чем классификация мышц (табл. 13.1) представляет большие затруднения. По форме различают мышцы плоские, длинные, квадратные, трапециевидные, ромбовидные и др.
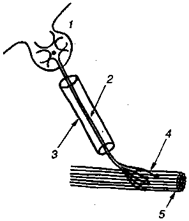
Рис.13.1. Схематическое изображение мотонейрона и двигательной единицы(по Дж. Бендолл): 1 — нервная клетка в переднем роге; 2 — отдельное нервное волокно; 3— нервный ствол; 4 — концевые пластинки (нервные окончания); 5 — мышечные волокна
Таблица 13.1
Дата добавления: 2015-05-03; просмотров: 1140;