Временная диаграмма работы микропроцессора
Выполнение каждой команды производится МП в строго определенной последовательности, определяемой кодом команды, и синхронизируется во времени сигналами C1, C2 тактового генератора.
Период синхросигналов C1, C2 называется машинным тактом (T). Длительность такта может быть равна от 0,5 до 2 мкс.
Время, требуемое для извлечения из памяти одного байта информации или выполнения команды, называется машинным циклом. Машинный цикл может состоять из 3…5 машинных тактов.
При включении питания на вход RESET микропроцессора подается высокий уровень напряжения, который устанавливает его в исходное состояние. В такте T1 МП выдает на шину адреса адрес ячейки памяти, в которой хранится первая команда программы, а на шину данных – информацию состояния, которая и определяет действия МП в конкретном машинном цикле. Следует подчеркнуть, что информация состояния выдается на шину данных в каждом такте T1 любого машинного цикла. Эта информация используется для выработки сигналов управления запоминающим устройством (ЗУ), портов ввода/вывода, а также для организации различных режимов работы МП.
В зависимости от сочетания сигналов состояния, выдаваемых в конкретном цикле, машинные циклы можно разделить на десять типов:
- Цикл М1 – прием первого байта команды в регистр команд;
- Цикл чтения из ЗУ – чтение ЗУ по содержимому счетчика команд или адресу, записанному в пару регистров BC, DE, HL;
- Цикл записи в ЗУ – запись в ЗУ по адресу, содержащемуся в паре регистров BC, DE, HL.
- Цикл чтения стека – чтение ЗУ по содержимому указателя стека;
- Цикл записи в стек – запись в ЗУ по содержимому указателя стека;
- Цикл ввода – ввод информации в аккумулятор из порта;
- Цикл вывода – вывод информации из аккумулятора в порт;
- Цикл прерывания – прием кода команды RST или CALL из контроллера прерываний;
- Цикл останова;
- Цикл прерывания при останове – прием кода команды RST или CALL при выводе МП из режима ”Останов” по прерыванию.
Наименования сигналов состояния и соответствие их разрядам шины данных приведены в таблице 2.11. В таблице 2.12 приведено соответствие этих сигналов типам машинных циклов.
Таблица 2.11 Соответствие сигналов состояния разрядам шины данных
| Разряд шины данных | Наименование сигналов состояния |

| Подтверждение прерывания. |

| Запись/вывод. Уровень лог. «0» означает, что происходит запись в ОЗУ или вывод информации из микропроцессора; уровень лог. «1» - чтение из ОЗУ или ввод информации в микропроцессор. |

| Стек. На адресной шине установлено содержимое указателя стека. |

| Подтверждение останова. |

| Вывод. На адресной шине установлен номер внешнего устройства и осуществляется вывод содержимого аккумулятора. |

| М1. Микропроцессор принимает первый байт команды |

| Ввод. На адресной шине установлен номер устройства ввода и осуществляется ввод информации в аккумулятор микропроцессора. |

| Чтение. Производится чтение из памяти в микропроцессор. |
Таблица 2.12 Соответствие сигналов типам машинных циклов
| Вид цикла | Разряды шины данных | |||||||
|
|
|
|
|
|
|
|
| |
| Выборка первого байта команды М1 | ||||||||
| Чтение из памяти | ||||||||
| Запись в память | ||||||||
| Чтение стека | ||||||||
| Запись в стек | ||||||||
| Ввод из порта | ||||||||
| Вывод в порт | ||||||||
| Прерывание | ||||||||
| Останов | ||||||||
| Прерывание при останове |
Поскольку слово состояния выдается в такте Т1, а используется на протяжении всего машинного цикла, то его необходимо запоминать во внешнем регистре слова состояния (РСС). На рисинке 2.4 показана упрощенная схема подключения РСС к МП.
Рис.2.4.Схема подключения РСС
Рассмотрим временные диаграммы работы МП при различных машинных циклах (рисунок 2.5, 2.6).
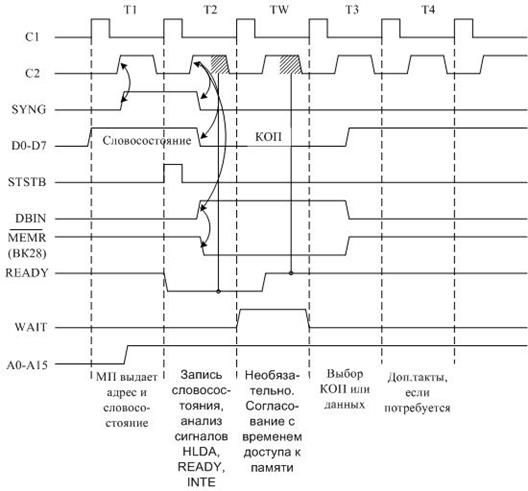
Рисунок 2.5.Временная диаграмма извлечения кода команды или данных
В первом такте синхронизации Т1 микропроцессор выставляет на шину адреса адрес очередной команды, а на шину данных – слово состояние. По положительному фронту тактового сигнала С2 формируется сигнал SYNG, который используется для синхронизации тактового генератора РФ24.
В такте Т2 сигналом STSTB слово состояния записывается во внешний регистр ИС ВК28, по положительному фронту сигнала С2 формируется сигнал DBIN и микропроцессор переводит буфер данных в режим ввода. Кроме этого он осуществляет проверку готовности внешнего устройства к обмену. При этом схема INC/DEC увеличивает содержимое счетчика команд на 1. По переднему фронту сигнала С2 формируется сигнал SYNG и выдается слово состояния на шину данных.
В такте Т2 слово состояния записывается в РSW. По переднему фронту сигнала С2 формируется сигнал DBIN, который разрешает прохождение данных в МП через системный контроллер. Сигнал  на выходе ВК28 становится активно низким и разрешает чтение данных из памяти, которые запишутся во внутренние регистры микропроцессора в такте Т3. Если в такте Т3 сигнал на входе READY равен 1, то микропроцессор принимает информацию по каналу данных, анализирует состояние сигнала на входе HLDA и, если этот сигнал равен 1, то после окончания такта Т3 переходит в режим захвата. В зависимости от кода операции машинный цикл завершается после выполнения тактов Т3, Т4, Т5.
на выходе ВК28 становится активно низким и разрешает чтение данных из памяти, которые запишутся во внутренние регистры микропроцессора в такте Т3. Если в такте Т3 сигнал на входе READY равен 1, то микропроцессор принимает информацию по каналу данных, анализирует состояние сигнала на входе HLDA и, если этот сигнал равен 1, то после окончания такта Т3 переходит в режим захвата. В зависимости от кода операции машинный цикл завершается после выполнения тактов Т3, Т4, Т5.
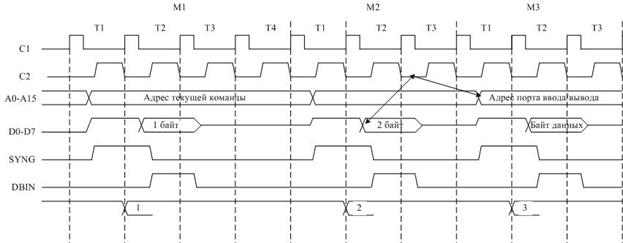
Рисунок 2.6. .Временная диаграмма работы МП при выполнении команды ввода
При выполнении микрокоманд микропроцессор может переходить в одно из трех состояний: «ожидание», «захват» и «останов», длительность которых определяется внешними управляющими сигналами. Сигнал высокого уровня на входе READY обеспечивает автоматическое выполнение команд программы микропроцессора с частотой тактовых сигналов. Если же на вход READY подан низкий уровень напряжения, то микропроцессор переходит в режим «ожидание» и формирует на выходе WAIT сигнал высокого уровня. При подаче на вход HLD высокого уровня напряжения микропроцессор переходит в режим «захват» и подтверждает переход в это состояние формированием сигнала высокого уровня на выходе HLDA.
Буферные схемы канала адреса и шины данных переходят в третье состояние, а выходные управляющие сигналы – в низкий уровень, за исключением HLDA и WR. МП переходит в состояние «захват».
Дата добавления: 2015-04-25; просмотров: 3223;