Швейна машина класу 85.
Машина призначена для виконання підшивних операцій при виготовленні виробів з тонких легких тканин. Отримується однониткова «потаємна», тобто невидима з лицьового боку строчка, що складається з ланцюжкових стібків, розміщених під деяким кутом до лінії переміщення матеріалу.
Принцип роботи. Робочими органами утворення стібка є дугоподібна «крива» голка, яка коливається у вертикальній площині, перпендикулярній до напрямку подачі матеріалу, і двохріжковий петельник, що здійснює складний просторовий рух. Спеціальним пристроєм цієї машини, як і всіх підшивних машин, які утворюють потаємну строчку, є механізм витискання матеріалу, що витискає матеріал через проріз голкової пластини і відповідним чином вигинає його для проколювання голкою.
Матеріал подається верхньою транспортуючою зубчастою лапкою, притискання матеріалу – двома нижніми підпружиненими лапками.
Голкова нитка 3 (рис. 8.3) з бобіни від стійки проходить через нерухомі нитконапрвлячі 4 і 5, між тарілочками 1 регулятора натягу, а далі через нитконаправляч 6 на корпусі машини, у направляч 11 на голководі 7, у нерухомий нитконаправляч 9 у голковій пластині 8 і у вушко голки 10.
Натяг нитки регулюється гайкою 2 в регуляторі натягу.
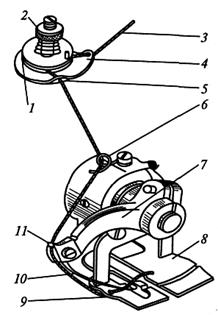
Рис. 8.3. Схема заправки голкової нитки у швейній машині класу 85
Механізм голки 1 (рис. 8.4) являє собою просторовий кривошипно-коромисловий чотирьохланковий механізм. Ведучою ланкою механізму є ексцентрик 14, закріплений на головному валу 25. На ексцентрику розміщена нижня роз’ємна головка шатуна 15, а на кульковому ексцентричному пальці 16 – його верхня головка. Ексцентричний палець 16 гвинтом 17 закріплений у важелі 18, який встановлюється на валу голки 24. Вал 24 проходить у двох втулках корпуса машини. На передньому кінці валу 24 гвинтом 35 кріпиться голковод 34, у якому гвинтом 3 кріпиться голка 1.
Обертання ексцентрика 14 перетворюється механізмом у зворотно-поворотні рухи голки 1.
На голковій пластині машини міститься стійка, у якій встановлена гальмівна пластина, яка притискається зверху пружиною кручення. Гальмівна пластина запобігає зміщенню матеріалу при холостому ходу видавлювала.

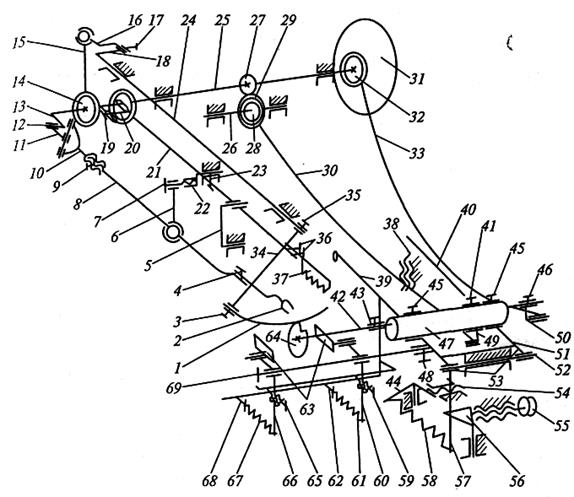
Рис. 8.4. Кінематична схема механізмів швейної машини класу 85
Хід голки регулюється поворотом ексцентричного пальця 16 в отворі важеля 18 після послаблення гвинта 17. Після регулювання гвинтом 17 закріплюють положення пальця 16.
Положення голки 1 відносно петельника 2 (кутова орієнтація голковода 34) встановлюється після послаблення гвинта 35. Голка 1 повинна відхилятися від матеріалу так, щоб голкова петля вийшла для захоплення петельником. При цьому вушко голки повинно бути праворуч від ріжків петельника на відстані  .
.
Положення голки 1 відносно пазу голкової пластини встановлюється після послаблення гвинта 35 і зміщення голковода 34 вздовж валу 24.
Положення гальмівної пластини на голковій пластині можна відрегулювати поворотом ексцентричної втулки, у якій розміщена вісь кріплення пластинки.
Механізм петельника 2 являє собою просторовий п’ятиланковий механізм. Ведуча ланка – кривошип 13 з пальцем 12, не паралельним до осі обертання валу 25. На пальці 12 кривошипа розміщена ланка 11, яка через вісь при встановленні її перпендикулярно до осі пальця 12, з’єднується з вилкою 10. У вилку 10 загвинчується шатун 8 і кріпиться стягуючим гвинтом 9. Шатун 8 з’єднується з коромислом 6 через сферичний шарнір. У верхню вісь коромисла 6 вставляється шарнірний гвинт 7, який загвинчується в ексцентричну втулку 22. Втулка 22 гвинтом 23 закріплена в копусі машини. На передній частині шатуна 8 закріплено гвинтом 4 петельник 2.
Обертання кривошипа 13 перетворюється механізмом у просторову сідлоподібну траєкторію руху петельника 2.
Положення петельника 2 по висоті відносно голки встановлюється поворотом ексцентричної втулки 22 після послаблення гвинта 23.
Своєчасність підходу петельника до голки і положення петельника 2 при винесенні петлі для захоплення голкою регулюється його зміщенням після послаблення гвинта 4 на шатуні 8.
Якщо необхідно розвернути петельник 2, то потрібно послабити гвинт 9 і повернути стержень шатуна 8, розвертаючи площину ріжків петельника 2.
Механізм переміщення рейкового типу складається з вузлів переміщення рейки 37 і притискних лапок 63.
Рейка 37 кріпиться двома гвинтами 36 до шатуна 21. На головному валу 25 встановлюється регульований ексцентрик, який складається з повзуна-ексцентрика 20 і корпуса, у якому повзун-ексцентрик зміщується гвинтом, який розміщений вздовж повзуна, після послаблення гвинта 19, встановленого збоку повзуна і який кріпить повзун в корпусі. На повзуні-ексцентрику 20 кріпиться шатун 21, який містить отвір для входу верхньої осі коромисла 5. Нижня вісь коромисла 5 проходить у втулці корпуса машини.
Обертання головного валу 25 і регульованого ексцентрика 20 перетворюється механізмом в еліпсоподібну траєкторію руху рейки 37.
Лапки 63 за допомогою шарнірних гвинтів і гайок встановлені на кутових важелях 60 і 66, спільною віссю яких є шарнірний гвинт 69. Гвинт 69 вставляється в отвір підпружиненої платформи 53 і кріпиться стягуючим гвинтом 48. До нижніх плечей кутових важелів 60 і 66 приєднані пружини 61 і 67, інші кінці яких закріплені гвинтами 62 і 68 в корпусі машини. Пружини 61 і 67 притискають лапки 63 до матеріалу. Положення лапок 63 по висоті обмежують гвинти-упори 59 і 65.
Довжина стібка регулюється зміною величини ексцентриситету в ексцентрику. Для цього вивільняють повзун-ексцентрик 20 від кріплення гвинта 19, встановленого з боку направляючої повзуна. Гвинтом, розміщеним вздовж повзуна, регулюється ексцентриситет. Після регулювання гвинт 19 закріплюють.
Своєчасність переміщення матеріалу забезпечується поворотом корпуса ексцентрика 20 після послаблення двох гвинтів його кріплення на головному валу 25.
Положення рейки 37 відносно голкової пластини встановлюється зміщенням самої рейки відносно шатуна 21 після послаблення гвинтів 36.
Положення лапок 63 по висоті регулюється гвинтами-упорами 59 і 65.
Зусилля притискання лапок 63 змінюється при загвинчуванні і викручуванні гвинтів 62 і 68 кріплення пружин 61 і 67 до платформи 53.
Видавлювач 64 може здійснювати лише зворотно-поступальні рухи, а також зворотно-поворотні рухи з періодичним підйомом і опусканням. Тому механізм видавлювача 64 містить вузли поворотних рухів і підйому і опускання.
Для здійснення зворотно-поступальних рухів на головному валу 25 закріплений ексцентрик 32, виготовлений в суцільному виконанні зі шківом 31 машини. На ексцентрику 32 кріпиться головка шатуна 33, а передня його головка за допомогою шарнірного гвинта з’єднана з важелем 50, який стягуючим гвинтом 46 закріплений на правому кінці валу 42. На цьому валу жорстко встановлено видавлювач 64. Осьовому зміщенню валу 42 запобігає важіль 50 і стопорне кільце 43. Вал 42 проходить через ексцентричну втулку 47 (вісь втулки не співпадає з віссю отвору, у якому проходить вал 42). При вимкненому з роботи вузлі підйому видавлювала (шестірні не знаходяться в зачепленні) ексцентрична втулка 47 закріплюється в платформі 53 гвинтами 45.
При роботі вузла підйому видавлювала шестірні 27 і 29 знаходяться в зачепленні і передають оберти ексцентрику 28, закріпленому на шестірні 29. Шестірня 29 і ексцентрик 28 вільно посаджені на вісь 26. Ексцентрику 28 оберти передаються від головного валу з передатним відношенням 2:1. Ексцентрик 28 робить повний оберт за два оберти головного валу 25.
На ексцентрику 28 розміщена головка шатуна 30. Його передня головка з’єднується шарнірним гвинтом з важелем 49, який закріплений на ексцентричні втулці 47 стягуючим гвинтом 41.
При обертанні шестерень 27 і 29 ексцентрик 28 через шатун 30 і важіль 49 передає зворотно-поступальні рухи ексцентричній втулці 47. При повороті втулки 47 зі зміщеним відносно її осі отвором (де проходить вал 42) валу 42 передається переміщення по вертикалі.
Рухома платформа 53, у якій проходить ексцентрична втулка 47 і закріплений механізм притискних лапок, являє собою двоплечий кутовий важіль, горизонтальне плече (елементи 39, 40, 51) якого є платформою для матеріалу, а вертикальне плече 57 пружиною 58 з’єднане з кутовим важелем 44. Вісь обертання важеля 44 закріплена в корпусі машини. Гвинт 54 фіксує положення важеля 44. Вісь 52 обертання платформи 53 закріплена в приливах корпуса машини.
Опускання платформи 53 здійснюється при натисканні на педаль, з’єднану з нею тягою. Для обмеження її опускання служить упорний гвинт 38, а для обмеження підйому – гвинт (на рис. 8.4 не показано), розміщений за вертикальним плечем 57 платформи 53.
Для регулювання положення платформи 53 по висоті, а отже, і за величиною захвату голкою нижнього шару матеріалу, передбачено гвинт 55 зі спеціальною головкою. Кінець гвинта 55 впирається в сектор 56, закріплений на вертикальній осі в корпусі машини. При загвинчуванні гвинта 55 сектор повертається і натискає на вертикальне плече 57 і опускає платформу 53.
Для встановлення видавлювала по прорізі голкової пластини його зміщають разом з валом 42 в осьовому напрямку після послаблення гвинтів кріплення важеля 50 і стопорного кільця 43.
Кутове положення видавлювала регулюється поворотом його разом з валом 42 відносно важеля 50 після послаблення гвинта 46.
Своєчасність роботи видавлювала регулюється поворотом шківа 31 і ексцентрика 32 на головному валу 25 після послаблення гвинтів їх кріплення.
Періодично підйом видавлювала у прорізі голкової пластини встановлюється поворотом ексцентричної втулки 47 відносно важеля 49 після послаблення гвинта 41.
Своєчасність підйому встановлюється поворотом ведучої шестірні 27 на головному валу 25 після послаблення гвинтом її кріплення.
Зусилля продавлювання матеріалу видавлювачем 64 в голковій пластині регулюється гвинтом 54.
Дата добавления: 2015-04-03; просмотров: 5416;