Receiver Functional Description
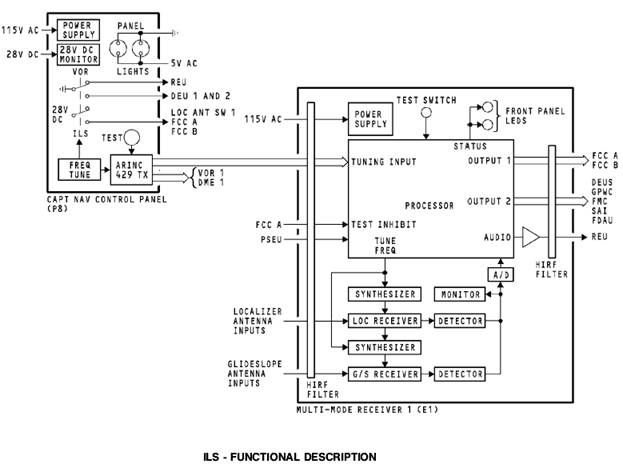
All inputs to the receiver go through a high intensity radiated frequency (HIRF) filter. This filter provides protection to internal circuits.
Tune inputs from the NAV control panel go to the main processor. The processor sends the tune frequency to the frequency synthesizer circuits. The frequency synthesizer circuits tune the localizer receiver and glideslope receiver.
The receiver circuits send the RF signal inputs from the
antennas to the main processor. The processor computes
localizer deviation and glideslope deviation.
ILS data goes out on two ARINC 429 buses.
Output 1 goes to FCC A and FCC B.
Output 2 goes to these LRUs:
· FDAU
· Standby attitude indicator
· GPWC
· FMC
· DEUs.
The A/D function of the receiver converts the audio from the localizer ground station from an analog to a digital format. The audio then goes to the main processor. The main processor sends the audio to the REU. The processor also detects any morse code station identifier and sends it out on the data buses. When there is a station identifier on the data bus, the DEUs replace the frequency display with the four letter station identifier.
Test
To start an ILS test, push the NAV control panel test switch when there is an ILS frequency active or push the front panel test switch. When the processor receives a test signal, it does a test of operation and receiver condition. Test results show on the front panel LED status indicators. The LRU status LED shows red for test faults or green if there are no faults. The control fail LED comes on red if there is no tuning input data from the control panel. The control fail LED will show green for valid tune inputs.
Дата добавления: 2015-04-21; просмотров: 1121;